
Fターム[3D301AA18]の内容
車体懸架装置 (72,824) | 目的、機能 (15,449) | 操安、乗心地制御 (6,736) | 接地荷重、接地性、グリップ、タイヤの摩擦円 (474) | 各車輪間の接地荷重移動 (90)
Fターム[3D301AA18]に分類される特許
1 - 20 / 90
サスペンション装置
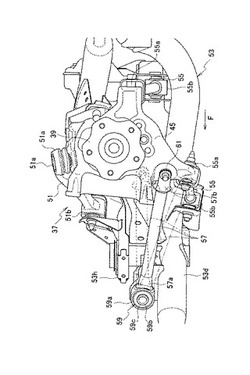
【課題】左右の操舵輪で車両重量を受ける割合が互いに異なる場合であっても、車両走行時での操舵特性に左右差が生じるのを抑える。
【解決手段】ラジアスロッド57の前端57a及び後端57bを、車体側のサスペンションメンバ53及び後輪7,9のリアアクスルハウジング45に、外筒、内筒及びゴムブッシュを有するマウント部材59及び61を介してそれぞれ連結する。左右の前輪3,5のうち車両重量を受ける割合が低いほうの前輪3に対角する位置にある右後輪9が、サスペンション装置に荷重が掛かっていない状態で、左後輪7よりも車体に対して下方位置となるようラジアスロッド57を連結する。サスペンション装置に荷重が掛かっている実車状態では、ゴムブッシュはねじりが付与されて弾性変形した状態となる。
(もっと読む)
車両状態量推定装置及びサスペンション荷重推定装置

【課題】車両状態量及びサスペンション荷重の推定精度が確保される車両状態量推定装置及びサスペンション荷重推定装置を提供する。
【解決手段】サスペンション荷重に伴うボディパネル1の歪量を、直接、ボディパネル1に取り付けられた半導体歪センサ3によって検出するので、車両走行時の荷重移動を高い精度で推定することができる。
(もっと読む)
サスペンションシステム
【課題】4つの車輪が菱形の頂点にそれぞれ配置された車両用の実用性の高いサスペンションシステムを提供する。
【解決手段】サスペンションシステム10は、各車輪12をそれぞれ回転可能に保持する4つのキャリア16と、4つのキャリアをそれぞれ車体に回動可能に保持する4つのサスペンションアーム18と、4つのサスペンションアームにそれぞれ対応して設けられた4つのサスペンションスプリング20と、前輪12Fから左輪12MLおよび右輪12MRの一方に向かって延びる姿勢で車体に回転可能に保持されたトーションバーを有し、そのトーションバーから延び出して前輪側に連結された前輪側アーム、および、前輪側アームとは反対方向に延び出して左右輪の一方の側に連結された中間輪側アームを有するトーションスプリング26とを有する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備え、コントローラ500は、加速度方向側の車輪から重心位置までの距離を、加速度方向と反対側の車輪から重心位置までの距離に対して長くなるように設定する。
(もっと読む)
リーチ型フォークリフト
【課題】フォークで荷役を持ち上げるときに、車体の転倒を防止して安定性を保ち、シリンダからの衝撃音を防止できるようにする。
【解決手段】ドライブシリンダの第1室11aとキャスタシリンダ21の第1室21aとを接続する第1管路31と、ドライブシリンダ11の第2室11bとキャスタシリンダ21の第2室21bとを接続する第2管路32と、第1管路31とオイルタンク80とを接続する第3管路33と、第2管路32とオイルタンク80とを接続する第4管路34と、第1管路31を開閉する第1開閉バルブ41と、第3管路33及び第4管路34を開閉する第2開閉バルブ42と、を備え、制御部93は、リーチ型フォークリフトが走行してフォーク66が停止するときには、第1開閉バルブ41を開き、第2開閉バルブ42を閉じて、リーチ型フォークリフトが停止してフォーク66が作動するときには、第1開閉バルブ41及び第2開閉バルブ42を閉じる。
(もっと読む)
作業車
【課題】走行機体がサスペンション機構を介して走行装置を支持する作業車において、走行機体の対地高さを所定高さに維持させることができるとともに耐久性および応答性で優れたものにする。
【解決手段】サスペンション機構の作動を機体上昇側及び機体下降側に変更自在な作動変更手段を備え、サスペンション機構の作動の昇降変位を検出する昇降検出手段41による検出情報を基に、サスペンション機構の作動が目標範囲側に移動するように作動変更手段を操作する制御手段40を備えてある。サスペンション機構が作動停止状態になると、サスペンション機構の作動が目標範囲側に移動するように作動変更手段を昇降検出手段41による検出情報に基づく制御手段40の制御に優先して操作する補助制御手段45を備えてある。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を傾斜させる際の輪荷重変動を補償し、旋回走行時の安定性を一層向上させる。
【解決手段】左右輪荷重変動算出部43により、車両の旋回走行状態及び目標傾斜角に応じて、左右輪荷重変動を推定し、限界値補正量算出部44により、車両の旋回走行状態に応じて、左右輪荷重変動時の物理的限界輪荷重に対する限界値補正量を算出する。そして、傾斜角制限部45により、物理的限界輪荷重から限界値補正量を減じて制御用限界輪荷重を算出し、左右輪荷重変動が制御用限界輪荷重を超えないように、目標傾斜角に対して制限処理を行う。左右輪荷重変動推定部43では、車両ダイナミクスモデル及びアクチュエータダイナミクスモデルに従い、左右輪荷重変動を予測する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の調整に伴って生じる車両の挙動特性の変化に基づく違和感を、運転者等に与えることのない車両用制御装置を提供する。
【解決手段】車両用制御装置100は、安定キャンバ付与基準データ72B等に規定された条件を満たす場合、キャンバ角調整装置44を制御し、左後輪2RL及び右後輪2RRのキャンバ角を調整する。又、車両用制御装置100は、旋回判定基準データ72Cの基準値と、加速度センサ装置80等の検出値を比較することで、車両1が旋回中であるか否かを判定する。車両1が旋回中である場合、車両用制御装置100は、安定キャンバ付与基準データ72Bに係る条件を満たしていても、キャンバ角調整装置44によるキャンバ角の調整を禁止する。
(もっと読む)
車両用懸架装置および車両の制動偏向抑制方法
【課題】車両の直進制動時の偏向を簡易な手法で抑制する。
【解決手段】ある態様の車両用懸架装置においては、車幅方向に延在する本体の中間部が車体に支持されるスタビライザバー34と、スタビライザバー34の左右両端部と左右のロアアーム22とをそれぞれ上下に連結する左右のスタビライザリンク36と、を備える。そして、車両制動時の制動力が、左右の車輪のうち上下方向の荷重分担の大きい右前輪14aの接地荷重を低減する方向に作用し、上下方向の荷重分担の小さい左前輪14bの接地荷重を増加させる方向に作用するよう、左右のスタビライザリンク36の車両前後方向の傾きが異なるように構成されている。
(もっと読む)
サスペンション制御装置
【課題】 輪荷重増減の応答性と絶対量を制御することができ、車両をより安全に運転制御することができるようにする。
【解決手段】 複数の車輪2,3のうち輪荷重を増加させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をハード側とし後期をソフト側に切替える縮み行程ハード・ソフト切替制御と、伸び行程中の初期をソフト側とし後期をハード側に切替える伸び行程ソフト・ハード切替制御とのいずれかを実行する。輪荷重を減少させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をソフト側とし後期をハード側に切替える縮み行程ソフト・ハード切替制御と、伸び行程中の初期をハード側とし後期をソフト側に切替える伸び行程ハード・ソフト切替制御とのいずれかを実行する。
(もっと読む)
サスペンション部材およびサスペンション装置
【課題】重心位置に偏りがある車両における制動時の安定性をより簡単な構成で向上させることができる技術を提供する。
【解決手段】サスペンション部材としてのサブフレーム30は、右車輪102Rおよび左車輪102Lが連結されるとともに、車体に連結される。また、サブフレーム30は、車両の重心位置に基づいて車体に対して車幅方向に位置を調節可能である。また、サスペンション装置1は、上述の構成を有するサブフレーム30と、サブフレーム30を車幅方向に変位させるための変位部と、変位部によるサブフレーム30の変位を制御する制御部と、を備える。
(もっと読む)
車両制御装置および車両制御方法
【課題】重心位置に偏りがある車両における制動時の安定性を向上させる技術を提供する。
【解決手段】車両制御装置1は、前輪および後輪の接地荷重を左右輪で異ならせるための接地荷重調節部としてのアクティブスタビライザ装置10と、目標ヨーレートを設定するための目標ヨーレート設定部102と、実ヨーレートを調節するためのヨーレート制御部104と、を備える。ヨーレート制御部104は、制動時に前輪および後輪それぞれの左右輪における接地荷重を異ならせて、前輪および後輪のうち制動力配分の大きい側に第1ヨーモーメントを、制動力配分の小さい側に第1ヨーモーメントと逆方向の第2ヨーモーメントを発生させ、第1ヨーモーメントと第2ヨーモーメントにより実ヨーレートを目標ヨーレートに近づける。
(もっと読む)
サスペンション制御装置
【課題】 車両の横加速度に応じて車輪の輪荷重を制御し、車両の安定性を高めるようにする。
【解決手段】 車体1には横加速度Ayを検出する横加速度センサ12を設ける。横加速度センサ12は、検出信号をコントローラ14に入力する。コントローラ14は、横加速度Ayの増加中には、前輪2の輪荷重をアップする、またはダウンさせにくくするように、前輪側の減衰力可変ダンパ6の減衰力特性をハード側に設定し、後輪側の減衰力可変ダンパ6の減衰力特性をソフト側に設定する。また、コントローラ14は、横加速度Ayの減少中には、後輪3の輪荷重をアップする、またはダウンさせにくくするように、前輪側の減衰力可変ダンパ6の減衰力特性をソフト側に設定し、後輪側の減衰力可変ダンパ9の減衰力特性をハード側に設定する。
(もっと読む)
フォークリフト
【課題】車体の地上高さや駆動輪の輪重等を簡単に調整できるようにする。
【解決手段】駆動輪10を上下に揺動するためのドライブシリンダ11と、補助輪20を上下に揺動するためのキャスタシリンダ21と、ドライブシリンダ11の第1室とキャスタシリンダ21の第1室とを接続する第1管路31と、ドライブシリンダ11の第2室とキャスタシリンダ21の第2室とを接続する第2管路32と、作動油ポンプ81と制御弁73,74,75との間を第1管路31に接続する第3管路91と、第3管路91を開閉する切換バルブ90とを備え、制御弁73,74,75は、アンロード状態のときに絞り回路が構成されるようになっており、センサー94の検出結果に基づいて、制御弁73,74,75がアンロード状態のときに、作動油ポンプ81を駆動して切換バルブ90を開く調整動作を行う。
(もっと読む)
フォークリフト
【課題】運転室を従来よりも低い位置に設けることができると共に、車体の浮き沈みを防止して運転室の安定性を向上させる。
【解決手段】駆動輪10を有するドライブユニット1と、補助輪20を有するキャスタユニット2と、駆動輪10を上下に揺動するためのドライブシリンダ11と、補助輪20を上下に揺動するためのキャスタシリンダ21と、ドライブシリンダ11の第1室11aとキャスタシリンダ21の第1室21aとを接続する第1管路31と、ドライブシリンダ11の第2室11bとキャスタシリンダ21の第2室21bとを接続する第2管路32とを備え、駆動輪10と補助輪20とがそれぞれ逆方向に上下に揺動する。
(もっと読む)
サスペンション制御装置及び車両制御装置
【課題】 車両をより安全に運転制御することができるようにする。
【解決手段】 複数の車輪2,3のうち輪荷重を増加させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をハード側にすると共に後期をソフト側に切替える輪荷重増加時の縮み行程制御と、伸び行程中の初期をソフト側とすると共に後期をハード側に切替える輪荷重増加時の伸び行程制御と、輪荷重を減少させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をソフト側とすると共に後期をハード側に切替える輪荷重減少時の縮み行程制御と、伸び行程中の初期をハード側とすると共に後期をソフト側に切替える輪荷重減少時の伸び行程制御との少なくともいずれか一つの制御を選択的に行う。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
車両の制御値設定方法
【課題】旋回外側への遠心力と重力とが釣り合うような角度になるように車体の傾斜角度を制御するために使用される制御値を短時間で簡便に、かつ、正確に設定することができ、車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができ、安全性の高い制御を行うことができるようにする。
【解決手段】横加速度センサが検出する横加速度がゼロになるように、車体の傾斜を制御する車両の制御値設定方法であって、所定の周期で所定の傾斜角度となるように車体を左右に揺動させ、横加速度センサが検出した横加速度の値に基づき、横加速度センサの高さの値を取得して制御値として設定する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、また、制御安定性を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を検出する複数の横加速度センサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、複数の横加速度センサが検出する横加速度のいずれかが取得不能になると、横加速度センサに応じてカットオフ周波数が相違するフィルタを取得可能な横加速度にかけ、フィルタをかけた横加速度がゼロになるように、車体の傾斜を制御する。
(もっと読む)
1 - 20 / 90
[ Back to top ]