
Fターム[3D301AA53]の内容
Fターム[3D301AA53]に分類される特許
1 - 20 / 457
作業車両
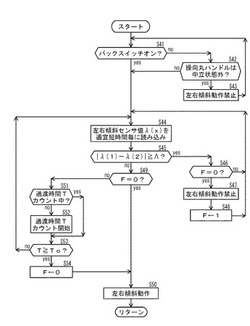
【課題】走行機体の傾斜制御の実行中に、圃場面等の傾斜や走行中の振動等によって、走行機体の傾斜姿勢が急激に変化したり傾斜角度検出用のセンサが過剰検出したりする場合に、傾斜制御を継続させて走行機体の乗り心地が悪化するという問題を解消する。
【解決手段】左右の走行部2にて支持された走行機体1と、走行機体1の左右傾斜姿勢を変更する一対のローリングアクチュエータ38と、走行機体1の前後傾斜姿勢を変更する一対のピッチングアクチュエータ177と、走行機体1の左右傾斜角度を検出する左右傾斜センサ374と、走行機体1の前後傾斜角度を検出する前後傾斜センサ381とを備える。左右傾斜制御の実行中において、現時点の左右傾斜センサ374値λ(2)とその直前の左右傾斜センサ374値λ(1)との差分の絶対値|λ(1)−λ(2)|が予め設定された左右傾斜閾値Λを上回ると、左右傾斜制御を禁止するように構成する。
(もっと読む)
車両用空気ばね式懸架装置

【課題】簡易な構成で、車両の姿勢変化に対して適切な反力を生じさせ、車両の姿勢を安定させることができる車両用空気ばね式懸架装置を提供する。
【解決手段】車両100に設けられた車台の左右外方に前端が回動自在に取り付けられ、車台の外側から車台の内側に至る湾曲した左右一対のトレーリング部材12と、トレーリング部材12に固定され、車両の左右輪が両端に組み付けられる車軸部材24と、車台とトレーリング部材12との間に設けられる左右一対の空気ばね14と、車台とトレーリング部材12との間に設けられる左右一対の衝撃吸収器16と、左右一対のトレーリング部材12にそれぞれ設けられ、左右一対のトレーリング部材12の間に相対変位が生じた際、相対変位に対して所望の反力を発生させる姿勢保持部材18と、を備えて構成した。
(もっと読む)
緩衝器
【課題】減衰力特性のヒステリシスを低減して、狙い通りの減衰力を発生することが可能な緩衝器を提供することである。
【解決手段】本発明の課題解決手段は、シリンダ1と、当該シリンダ1内に摺動自在に挿入されるピストン2と、当該ピストン2を両側に設けた一対の作動室R1,R2と、上記シリンダ1内に移動自在に挿入されて一端が上記ピストン2に連結されるピストンロッド3と、移動可能であって移動することで一方の作動室R1,R2の容積を変更する隔壁部材4と、当該隔壁部材4を附勢して上記一方の作動室R2を加圧する附勢要素5とを備えた緩衝器Dにおいて、上記隔壁部材4に一方の作動室R2を加減圧する方向へ推力を与えるアクチュエータ6を備えたので、作動室R2の圧力をコントロールでき、減衰力特性におけるヒステリシスを低減することができる。
(もっと読む)
車両用サスペンション装置
【課題】適切に車両の傾斜を抑制することができる車両用サスペンション装置を提供すること。
【解決手段】左車輪および右車輪にそれぞれ設けられたエアばねと、左車輪と右車輪とを接続し、車両に対してロール方向の力を発生するアクティブスタビライザと、を備え、停止時の路面の状態に応じて(S2−Y)エアばねによって変更した(S3,S4)左右の車高差を、発進後の走行路面状態に応じて変更する(S5−Y)ときに、エアばねによる車高調整、およびアクティブスタビライザが発生するロール方向の力によって車両の左右の傾斜を抑制する(S6)。
(もっと読む)
サスペンション制御装置
【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体1と車輪2との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が高周波のときには、補正相対速度V2ofsとして所定の値(例えば、直前の制御周期の補正相対速度V2ofs_Z)を出力する。相対速度V2が低周波のときには、補正相対速度V2ofsは、相対速度V2の符号(正負)の切換りに応じてその符号(正負)が切換わるようにする。
(もっと読む)
作業車
【課題】走行機体がサスペンション機構を介して走行装置を支持する作業車において、走行機体の対地高さを所定高さに維持させることができるとともに耐久性および応答性で優れたものにする。
【解決手段】サスペンション機構の作動を機体上昇側及び機体下降側に変更自在な作動変更手段を備え、サスペンション機構の作動の昇降変位を検出する昇降検出手段41による検出情報を基に、サスペンション機構の作動が目標範囲側に移動するように作動変更手段を操作する制御手段40を備えてある。サスペンション機構が作動停止状態になると、サスペンション機構の作動が目標範囲側に移動するように作動変更手段を昇降検出手段41による検出情報に基づく制御手段40の制御に優先して操作する補助制御手段45を備えてある。
(もっと読む)
キャンバ制御装置
【課題】所定の車輪にキャンバが付与されることで運転者が違和感を覚えるのを防止することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両が極低μ路を走行しているかどうかを判断する走行路判断処理手段と、該走行路判断処理手段によって、車両が極低μ路を走行していると判断された場合に、極低μ路用のキャンバ解除条件が成立したかどうかを判断するキャンバ解除条件成立判断処理手段と、キャンバ解除条件成立判断処理手段によって、極低μ路用のキャンバ解除条件が成立したと判断された場合に、所定の車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。操舵部材を操作したときにタイヤに大きなキャンバスラストが発生するのを防止することができる。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
電磁緩衝器
【課題】回転系の慣性質量を低減して円滑な伸縮運動を可能とし応答性を向上することができる電磁緩衝器を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、螺子軸1と螺子軸1に回転自在に螺合されるボール螺子ナット2とを備えた運動変換機構Tと、モータMとを備え、モータMにおけるロータ3とボール螺子ナット2とを連結した電磁緩衝器Eにおいて、ボール螺子ナット2の一方のエンドキャップ34をロータに回り止めして連結するとともに、他方のエンドキャップ35とナット本体30を貫通して一方のエンドキャップ34に螺合する螺子部材36によって、ナット本体30と各エンドキャップ34,35を一体化する。
(もっと読む)
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定速度における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備え、当該補正手段43は、緩衝器2の伸縮速度xが速度閾値Vp2を超えると当該伸縮速度xが0となるまでは、速度閾値Vp2と所定速度Vp1の差分βだけ速度増側へオフセットして発生減衰力を補正し、当該差分βから0までは発生減衰力を最小とするよう補正する。
(もっと読む)
ダンパ
【課題】 簡易な構成でありながら、大バンプ時における車体への入力を低減し、姿勢変化を効果的に抑制したダンパを提供する。
【解決手段】 リザーブ油室12の上部空間12a内には、作動油11の液面に対して所定の間隙をもってバンプ隔壁31が固着されている。バンプ隔壁31は、リザーブ油室12に嵌合するように円環状を呈しており、バンプ連通路である上下に貫通するオリフィス32と、上方から下方にのみ作動油11を流通させる一方向弁33とを備えている。
(もっと読む)
サスペンション装置
【課題】 液圧ダンパ装置40のストッパ当たりの発生頻度が低減されたサスペンション装置を提供すること。
【解決手段】 サスペンション本体10に追従上限周波数を越える周波数の振動が入力されたときに、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡がるように電動アクチュエータ30が伸縮作動する。このため追従上限周波数よりも大きな周波数の振動によって液圧ダンパ装置40が電動アクチュエータ30に対して移動した場合でも、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡げられているので液圧ダンパ装置40がバウンドストッパ47に当たり難くなる。よって、ストッパ当たりの発生頻度が減少し、ストッパ当たりの発生による乗り心地の悪化が抑えられるとともに、バウンドストッパ47の耐久性も向上する。
(もっと読む)
車両制御システムおよび制御装置
【課題】乗り心地と操縦安定性とを両立して向上させることができる車両制御システムおよび制御装置を提供する。
【解決手段】車両の振動を吸収するばね剛性を変更するばね剛性変更装置と、車両の振動を減衰する減衰量を可変可能な減衰量変更装置と、車両に発生する振動のうち路面入力による振動を推定する路面入力振動推定部と、振動のうちドライバ操作による振動を推定するドライバ操作振動推定部と、ばね剛性変更装置を制御して路面入力による振動を吸収させ、減衰量変更装置を制御してドライバ操作による振動を減衰させる制御部と、を備えることで上記課題を解決する。
(もっと読む)
スタビライザ制御装置
【課題】 アクチュエータの駆動に必要なトルクが過大となったときに、アクチュエータを停止させ、動力が無駄に消費されるのを防ぐようにする。
【解決手段】 車体の横加加速度(ロール量)、電動モータ25の回転位置(モータ実位置)から電流制御許可判断部40により電動モータ25の回転に必要なトルクを算定しつつ、この必要トルクがモータの最大トルクを越えているか否かを判断する。電流制御許可判断部40により電動モータ25が回転可能と判断した場合に、モータ位置制御部37から電流制御部38に指令電流を出力する。電動モータ25を回転できないと判断した場合には指令電流の出力を停止し、スタビライザ装置1の保持力により剛性を確保する。これにより、電力が無駄に消費されるような事態を回避し、エネルギ効率を高めるようにする。
(もっと読む)
サスペンション装置
【課題】インパクトショックのばね上部材への伝達を効果的に低減することができ、かつ、経済的なサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両におけるばね上部材とばね下部材との間に介装されてばね上部材とばね下部材との相対移動を抑制する減衰力を発揮する緩衝器2と、当該緩衝器2における減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、上記緩衝器2の収縮速度が所定の速度閾値α以上となるとともに、収縮速度の変化量が所定の速度変化量閾値β以上となると、当該緩衝器2の収縮側減衰力を最小とすることを特徴とする。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
車両のサスペンション制御装置
【課題】簡単な構成で、乗り心地及び悪路走破性の向上と、走行安定性の確保を両立させ得るサスペンション制御装置を提供する。
【解決手段】第1の連通路1によって、左輪側シリンダCLの車両上方側の圧力室12と右輪側シリンダCRの車両下方側の圧力室23とが連通接続されると共に、第2の連通路2によって、左輪側シリンダCLの車両下方側の圧力室13と右輪側シリンダCRの車両上方側の圧力室22とが連通接続されている。これら第1の連通路と第2の連通路との間には弁機構3が介装されており、常時は第1の連通路と第2の連通路とが連通し、流体が第1及び第2の連通路の一方側から他方側へ移動するときに生ずる圧力差が所定値以上となったときに、第1及び第2の連通路の一方側から他方側への流体の移動を阻止する。
(もっと読む)
サスペンション装置
【課題】操舵初期における車体のロールを充分に抑制でき、さらには、車体の左右の揺り返しを防止し、車両における乗り心地を向上させることができるサスペンション装置を提供することである。
【解決手段】緩衝器2nと、当該緩衝器2nにおける減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構を制御する制御装置4とを備えたサスペンション装置1において、車体Bの横加速度Gを検知する横加速度検知部5と、車体Bのロール角速度ωを検知するロール角速度検知部6と、操舵輪Sの舵角速度θを検知する舵角速度検知部7とを備え、制御装置4は、舵角速度θが所定の不感帯域を超えると、舵角速度θから求めた減衰力Fθと、横加速度Gから求めた減衰力FGと、ロール角速度ωから求めた減衰力Fωのうち、最大の減衰力を操舵初期加算減衰力とし、当該操舵初期加算減衰力を用いて緩衝器が発生すべき最終減衰力Dnを求めて緩衝器2nを制御する操舵初期制御を行う。
(もっと読む)
1 - 20 / 457
[ Back to top ]