
Fターム[3D301CA50]の内容
Fターム[3D301CA50]に分類される特許
1 - 20 / 274
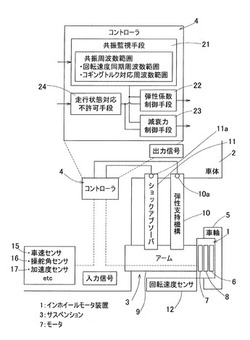
インホイールモータ車両用サスペンションシステム
【課題】 インホイールモータ車両に特有の振動を解消したインホイールモータ車両用サスペンションシステムを提供する。
【解決手段】 インホイールモータ装置1と車体2との間に介在したサスペンション3に、弾性支持機構10およびショックアブソーバ11を有する。弾性支持機構10は弾性係数の変更が可能であり、ショックアブソーバ11は減衰力の変更が可能である。モータ7の回転速度が、定められた共振周波数範囲に入るか否かを監視する共振監視手段21を設ける。共振周波数範囲にモータ7の回転数が入ると判定された場合に、弾性支持機構10に弾性係数を変更させる弾性係数制御手段22、およびショックアブソーバ11の減衰力を変更させる減衰力制御手段23を設ける。
(もっと読む)
インホイールモータ駆動装置

【課題】より簡易な構成で高度な制御を実現可能なインホイールモータ駆動装置を提供する。
【解決手段】インホイールモータ駆動装置11は、モータ側回転部材を回転駆動するモータ部と、モータ側回転部材の回転を減速して車輪側回転部材に伝達する減速部と、車輪側回転部材に固定連結された車輪ハブ26と、車輪ハブ26を回転可能に支持する車輪ハブ軸受と、モータ部、減速部、または車輪ハブ軸受を覆うケーシング12と、ケーシング12に取り付けられ、当該ケーシング12に生じる歪みを検出可能な複数のセンサ43と、センサ43により出力された歪み信号に基づいて、車輪に負荷される荷重を演算する信号処理装置46とを備える。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
スイングアーム一体式電動輪
【課題】インホイールモーターによってホイール(車輪)を直接駆動する構成は、電気的な効率が高く、機械的損失が少なく、極めて効率の良い構造だと周知されている。しかし、未だに研究段階から脱しておらず、モーターや車両への取り付け構造体は、個別に専用設計・製作されており、その結果、コストが下がらず、量産化の障害となっている。
【解決手段】汎用性の高いスイングアームの構造を提供すると共に、インホイールモーターと一体としてユニット化する事により、量産効果でコスト低減を図る。
(もっと読む)
キャンバ制御装置
【課題】燃費を十分に良くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバを付与するためのキャンバ可変機構と、車両に振動が発生しているかどうかを判断する振動発生判断処理手段と、車両に振動が発生していると判断された場合に、所定の車輪にキャンバを付与するキャンバ付与処理手段とを有する。車両に振動が発生していると判断された場合に、所定の車輪の各タイヤに、互いに対向する方向にキャンバスラストが発生させられるので、車両を十分に安定させて走行させることができる。燃費を十分に良くすることができる。
(もっと読む)
車輪給電装置
【課題】直流電源から電磁給電部を経て車輪側モータへ電力を供給する際、モータ駆動用のインバータ以外に、交流・直流変換用のコンバータが不要な構成となす。
【解決手段】モータ4L,4Rに係わる電磁給電部20L,20Rのコイル14L,14Rはそれぞれ、対応する側のモータ4L,4Rを個々に駆動しつつ出力制御するためのインバータ22L,22Rを介して相互に接続した後、共通な給電回路23により、電源21に接続する。電源21から供給される電力は、インバータ22L,22Rにより交流に変換された後、モータ4L,4Rに係わる電磁給電部20L,20Rのコイル14L,14Rにそれぞれ供給される。コイル14L,14Rは、交流電流の供給により磁束を発生し、コイルで発生した磁束は、モータ4L,4Rに係わるコイル16L,16Rに鎖交し交流の起電力を発生させる。これら交流起電力はそれぞれ、モータ4L,4Rを個々に駆動する。
(もっと読む)
車両運動制御システム
【課題】車輪特殊配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】左右輪14の各々に対応して設けられた距離変更装置を制御してそれらの各々の動作量に差を設けることで車体を傾斜させる場合に、(i)実現させるべき車体の傾斜の程度に基づいて目標動作量差ΔLを決定し、(ii)増加させる方の距離変更装置の動作量ΔLUPと減少させる方の距離変更装置の動作量ΔLDWとへの目標動作量差ΔLの配分を決定し、(iii)その配分に基づいて2つの距離変更装置の各々の目標動作量を決定する。そのことにより、車体を傾斜させる際の車体の重心位置,左右輪と前後輪との荷重配分等を変更することが可能である。
(もっと読む)
電動車両
【課題】ばね下荷重の低減化が図れる電動車両を提供することを課題とする。
【解決手段】無段変速機20は、車体フレーム11にサブフレーム51を介してスイング可能に取付けられる。スイングはリヤクッション49で制御される。
【効果】無段変速機20の出力軸33に駆動輪16を取付け、無段変速機20の入力軸をスイング軸46と同軸にすることで、重い電動機を車体フレームに支持させることができ、ばね下荷重を小さくすることができる。
(もっと読む)
キャンバ制御装置
【課題】所定の車輪にキャンバが付与されることで運転者が違和感を覚えるのを防止することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両が極低μ路を走行しているかどうかを判断する走行路判断処理手段と、該走行路判断処理手段によって、車両が極低μ路を走行していると判断された場合に、極低μ路用のキャンバ解除条件が成立したかどうかを判断するキャンバ解除条件成立判断処理手段と、キャンバ解除条件成立判断処理手段によって、極低μ路用のキャンバ解除条件が成立したと判断された場合に、所定の車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。操舵部材を操作したときにタイヤに大きなキャンバスラストが発生するのを防止することができる。
(もっと読む)
インホイルモータ装置
【課題】懸架機構の構成を複雑化したり大きく変更したりすることなく、簡単なサスペンション構成で配置でき、駆動力による車高変化を抑制できるインホイルモータ装置を提供すること。
【解決手段】インホイルモータ装置1が搭載される車両は、車体の横方向に延在する回転軸3aをもった車輪3と、車輪3に搭載されたインホイルモータ4と、車体2に横方向の動きが規制されるよう取り付けられて、車輪3の回転軸3a及びインホイルモータ4を懸架する懸架機構と、を有している。インホイルモータ4は、インホイルモータ4の回転軸4aが車輪3の回転軸3aと直交する、斜交する、及び、食い違うのいずれか一の関係となるよう、車輪3に搭載される。
(もっと読む)
電気自動車のフロントサスペンション構造
【課題】アウタロータ式インホイールモータを搭載した前輪駆動車において、キングピン軸を安定して位置決めし、キングピンオフセットを低減した安定した運転を実現する。
【解決手段】アウタロータ式インホイールモータを搭載した前輪ホイール1を、2本のアッパリンク2と2本のロアリンク3とで車体側部材であるにサブレーム7に連結する。両リンク2、3同士の交点により構成されるキングピン軸を前輪ホイール1のタイヤの接地中心Oを通るように設定し、キングピン軸の位置決め安定化のために前記各リンクのサブフレーム7との支持点にボールジョイントを内蔵したゴムブッシュ8を設置する。
(もっと読む)
電気自動車のリヤサスペンション構造
【課題】インホイールモータを搭載した電気自動車における、発進時や加速時のモータ駆動力による車体姿勢の変化を抑制し、車両の操縦安定性を向上させるとともに、モータのトルク変動に伴う車体への振動入力の伝達を抑制し、車体振動を低減させる。
【解決手段】インホイールモータに締結された後輪1のハブキャリア1aに、アッパトレーリングリンク5とロアトレーリングリンク6の後端をそれぞれ枢着し、両トレーリングリンクの前端を車体取付ブラケット13を介して車体に枢支するとともに、車体取付ブラケット13を車体取付部14との間に防振手段であるゴム15を装着して車体に固定する。
(もっと読む)
タイヤ/ホイール組立体
【課題】縦方向の剛性が適度に低く、適度な接地面積を確保でき、さらに、周方向における力の伝達が良好な、インホイールモーター方式に適したタイヤ/ホイール組立体を提供すること。
【解決手段】タイヤ/ホイール組立体10は、円筒形状の環状構造体11と、環状構造体11の外周部に、環状構造体11の周方向に向かって設けられるチューブ14と、環状構造体11と環状構造体11の内側に配置される電動機20との間に設けられて、電動機20のローター20Rの回転を環状構造体11へ伝達する湾曲した複数の金属ばね部材13と、を含む。
(もっと読む)
車両
【課題】 旋回性能を向上し、安定して旋回すると共に、簡単な機構で快適な乗り心地の車両を提供する。
【解決手段】 車体2と、車体に回転可能に取り付けられた車輪5と、車体2に連結される支持部材22,23,24,25と、支持部材23,24,25に対して回転可能に連結されると共に、車体2を旋回方向に傾斜させるリンク機構Lと、リンク機構Lを作動するアクチュエータ31と、左右の車輪5の接地点の高さ、車体2の傾斜方向に発生する第1の横加速度、、及び左右の車輪5の車輪速に応じてアクチュエータ31の回転速度を制御する制御部100と、を有する。
(もっと読む)
車両
【課題】 旋回性能を向上し、安定して旋回すると共に、簡単な機構で快適な乗り心地の車両を提供する。
【解決手段】 車体2と、車体2に回転可能に取り付けられた車輪4,5であって、車体2を操舵する操舵輪4と、車体2に回転可能に取り付けられた車輪であって、車体2を駆動する駆動輪5と、前記駆動輪を駆動するモータ41と、車体2に連結される支持部材22,23,24,25と、支持部材23,24,25に対して回転可能に連結されると共に、車体2を旋回方向に傾斜させるリンク機構Lと、リンク機構Lを作動するアクチュエータ31と、車体2の旋回時に旋回内側となる車輪5の接地点を中心として車体2の旋回時に旋回外側となる車輪5の接地点にかかるアクチュエータ31の回転による鉛直方向の角加速度が、車体2の旋回時に旋回外側となる車輪5の接地点にかかる自重による鉛直方向の加速度を超えないように、モータ41の駆動トルクを制御する制御部100と、を有する。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、乗員が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、加速操作部材の操作量に基づいて走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。走行制御処理手段は、共振の状態を判定する共振発生状態判定処理手段及び共振の状態に応じて、走行用の駆動部における駆動力の発生を抑制する駆動力抑制処理手段を備える。
(もっと読む)
車両
【課題】傾斜制御を精度良く行うことができるようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行制御用の制御値を発生させる走行制御処理手段と、走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両に許容範囲を超えて発生する傾斜状態を判定する傾斜状態判定処理手段、及び傾斜状態に応じて駆動力の発生を抑制する駆動力抑制処理手段を備える。車両に許容範囲を超えて発生する傾斜状態が判定され、判定された傾斜状態に応じて、走行用の駆動部における駆動力の発生が抑制されるので、車両が許容範囲を超えて傾斜させられることがなくなる。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、運転者が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行用の駆動部を駆動するための走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両の前後方向における重心の移動量を算出し、最大角加速度を算出し、最大角加速度に基づいて前記傾斜制御用の制御値の変動を制限する制御値制限処理手段を備える。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、車体に作用する横加速度及び前後加速度を検出するセンサと、操舵部又は駆動部を旋回方向に傾斜させるリンク機構と、リンク機構を作動させる傾斜用アクチュエータ装置と、車体の傾斜を制御する制御装置とを有し、制御装置は、センサが検出する横加速度に基づく傾斜制御を行うとともに、センサが検出する横加速度及び前後加速度に基づいて重心位置が制御可能な範囲を外れたか否かを判断し、重心位置が制御可能な範囲を外れた場合には車体を傾斜させる動作を停止させる。
(もっと読む)
車両
【課題】ブレーキをかけても、車体の安定を維持することができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵輪と、駆動輪と、車体に作用する横加速度を検出する横加速度センサと、車速を検出する車速検出手段と、操舵部又は駆動部を旋回方向に傾斜させるリンク機構と、リンク機構を作動させる傾斜用アクチュエータ装置と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、横加速度に基づく傾斜制御を行うとともに、最大減速度で減速した場合であっても、停止するまでの時間内に車体の傾斜角を安定傾斜角にまで復帰させることが可能であるように、車速を制御する。
(もっと読む)
1 - 20 / 274
[ Back to top ]