
Fターム[3D301EB22]の内容
車体懸架装置 (72,824) | 制御対象 (5,102) | 機械的スタビライザ/イコライザ (419) | ばね定数制御 (263)
Fターム[3D301EB22]に分類される特許
161 - 180 / 263
車両のロール制御システム
本発明は、フロントおよびリアのアクスルのレベルでアンチロールバーの剛性に作用し、特に車両の横方向加速度に応じてECUによって制御されるアクチュエータを備える自動車両用アクティブアンチロールシステムの制御方法において、カーブで、フロントおよびリアのアクスルに加えるべき全アンチロールトルクを決定し、前記全アンチロールトルクが、転回時の2つの内輪の一方にその浮き上がりを阻止する最小荷重がかかるように計算された2つのアクスル間の最適な剛性配分に由来するものであり、かつ、ハンドル操作時の車両の横方向加速度、速度および静的ゲインに応じて定められる所望の設定点に対応するものであることを特徴とする制御方法に関する。 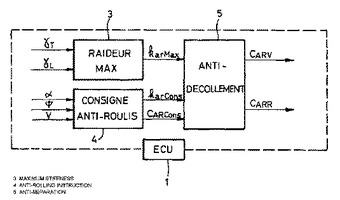 (もっと読む)
(もっと読む)
車輌の走行制御装置

【課題】車輌の偏向を抑制するよう車輌にヨーモーメントを付与することにより、ロール剛性可変手段に固着異常が発生した場合にも車輌の良好な走行性能、特に良好な直進走行性能を確保する。
【解決手段】前輪側のアクティブスタビライザ装置16に固着異常が生じているときには(S20)、左右の前輪10FL及び10FRのロールステアに起因して車輌に作用する余分なヨーモーメントに対抗するに必要な目標ヨーモーメントMtが演算され(S30)、また後輪側のアクティブスタビライザ装置18に固着異常が生じているときには(S40)、左右の後輪10RL、10RRのロールステアに起因して車輌に作用する余分なヨーモーメントに対抗するに必要な目標ヨーモーメントMtが演算され(S70)、車輌に作用する余分なヨーモーメントに対抗するに必要なヨーモーメントが車輌に付与されるよう制駆動力が制御される(S80、90)。
(もっと読む)
車両の横揺れ防止装置
旋回中の車体が外側に傾く荷重変化(ロール)に作用することができる少なくとも1つのアクチュエータ(21)と、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データから、ロール状態を予測するモジュールと、ロールに作用する外乱の漸近的除去設定値を生成するモジュールを備える、車両(1)の横揺れを制御する装置(11)。  (もっと読む)
(もっと読む)
車輌の操舵制御装置

【課題】操舵入力手段の不自然な位置変動や操舵入力手段の位置と車輌の実際の移動方向とのずれを抑制しつつ、車輌を目標走行経路に沿って良好に走行させる。
【解決手段】車輌12を車線112の横方向中心線114に沿って適正に走行させるための左右前輪10FL及び10FRの目標修正転舵角Δδtが演算され(S50)、ステップ70に於いて車輌12を走行路110の横方向中心線114に沿って適正に旋回走行させるために車輌に付与すべき目標ヨーモーメントMtが演算され(S70)、車輌が実質的に直進走行状態にあるか否か(S80)、走行路が不整路であるか否か(S90)、目標ヨーモーメントMtの大きさが基準値Mto以上であるか否か(S120)に応じて、前輪の転舵角の制御に加えて、操舵アシストトルクの制御又はロール剛性の前後配分比、左右輪の制駆動力差の制御が行われる(S100、110、130〜180)。
(もっと読む)
アクティブスタビライザ装置
【課題】本発明は、電動機に発生した回生電力の効率的な利用を図ることができるアクティブスタビライザ装置の提供を目的とする。
【解決手段】電動機の駆動により車両のロール姿勢を調整するアクティブスタビライザ装置において、車両の走行路に関する起伏情報を含む地図情報に基づいて前方道路に凹凸路面がある場合には(ステップ2;Yes)、前記電動機による回生電力が発生すると予測し(ステップ4)、その起伏地点に到達する前に回生電力の効率的な利用を図る制御を開始する。また、予測精度を上げるために、回生電力の発生が予測されていないにもかかわらず回生電力の発生が検出された地点を前記地図情報に登録し(ステップ12,14)、回生電力の発生が予測されているにもかかわらず回生電力の発生が検出されない地点を前記地図情報から削除する(ステップ8)。
(もっと読む)
車両内電源供給システム
【課題】 電動パワーステアリング装置やアクティブスタビライザ装置といった大電力消費タイプの車両状態制御装置が作動したときに電源電圧が低下しないように良好に電力制限を行う。
【解決手段】 電源コントローラ10は、電動パワーステアリング装置30の作動状況をモニタし、大電力を必要とする状態に推移する確率が高いと予測した場合には、電力消費制限に関する演算速度、および電動パワーステアリング装置30との通信速度、電力消費制限対象となる車両制御装置(例えば、デフォッガー装置40)との通信速度を増大して、応答性を高めた状態でスタンバイする。このため、急峻な大電力消費が行われても、電力消費制限が間に合って電源電圧の低下を防止する。
(もっと読む)
車両用スタビライザシステム
【課題】車両用アクティブスタビライザシステムの実用性を向上させる。
【解決手段】段差に起因する車体の傾斜および車体下部への段差の干渉を抑制すべく、1輪のみが段差上部に位置した状態では(S1)、段差上部輪をバウンドさせるとともに段差上部輪の対角輪をバウンドさせる(S2)。前後とも左右において同じ側の車輪が段差上部に位置した状態では(S3)、前後ともに段差上部輪をバウンドさせる(S4)。前後とも左右の車輪の間に段差が存在しない状態では(S5)、前後ともスタビライザ力を発揮させないようにする(S6,S9)。1輪のみが段差下部に位置した状態では(S7)、段差下部輪をリバウンドさせ、段差下部輪が存在しない側においてスタビライザ力を発揮させないようにする(S8)。また、段差走行の途中で車両の作動を停止させた際に作動状態を記憶し、作動開始時にその作動状態を再現する。
(もっと読む)
後輪クロス連結型ショックアブソーバシステムを備えた車輌
【課題】一対の前輪の左右のショックアブソーバの作動油圧の差と一対の後輪の左右のショックアブソーバの作動油圧の差とを対向させるフリーピストンを備えたシリンダ−ピストン装置よりなる後輪クロス連結型ショックアブソーバシステムを備えた車輌に於いて、左折や右折等による旋回が前期から後期へ遷移したとき旋回内側後輪部にてショックアブソーバが車体をロール増大方向へ押し上げる作用が生ずることに関して後輪クロス連結型ショックアブソーバシステムを改良する。
【解決手段】上記の押上げ作用をショックアブソーバ作動油路の絞りやアクティブスタビライザの制御により抑制する。
(もっと読む)
車輌の走行制御装置
【課題】運転者により急制動操作及び操舵操作が行われたときにも運転者の急制動要求を満たしつつできるだけ運転者の希望通りに車輌を旋回させ得るようにする。
【解決手段】ブレーキアシスト制御が実行され(S220)、運転者による緊急回避操舵の可能性があると判別されると(S240)、マスタシリンダ圧力の増大率ΔPmが大きいほど大きくなるよう運転者による緊急回避操舵の可能性の指標値Ksが演算され(S270)、指標値Ksが大きいほど小さくなるよう前輪の目標ロール剛性配分比Rsftが演算され(S300)、前輪の目標ロール剛性配分比Rsftに基づきアクティブスタビライザ装置16及び18が制御されることにより(S310)、緊急回避操舵の可能性が高いほどロール剛性の前後輪配分比が後輪寄りに制御され、車輌のステア特性がオーバーステア側へ変化される。
(もっと読む)
盗難防止機能を備えた車両
【課題】車両に設けられるイモビライザ(盗難防止装置)の実用性を向上させる。
【解決手段】アクチュエータ30によってスタビライザバー20の剛性を変化させるアクティブスタビライザシステム10を備える車両において、イモビライザ12を設ける場合に、アクチュエータが有する電動モータに発生する起電力を利用して、例えば、ヘッドライト144,ホーン146による警告を発するようにする。具体的には、インバータ104に設けた電流計によって起電力に依拠する電流を検知し、その検知結果を基にイモビライザECU140にバッテリ102から電力を供給して、イモビライザを起動させる。車両が作動を停止している状態において、イモビライザに電力を供給する必要がないことから、省電力なイモビライザが実現する。また、電流計があればよく、イモビライザの起動のための、特別なセンサを要しないことから、車両の構成の簡素化が図れる。
(もっと読む)
車輌の走行制御装置
【課題】車輌のステア特性の変化をできるだけ回避しつつ、タイヤの劣化の低減やタイヤ空気圧の更なる低下の抑制をできるだけ効果的に達成する。
【解決手段】タイヤ空気圧Pwtiがタイヤ空気圧低下率RPwtiに基づいて演算される基準値Pwteiよりも低いか否かの判別によりタイヤ空気圧が低下しているかが判別され(S20〜40)、何れかの車輪のタイヤ空気圧が低下しているときには、ナビゲーション装置60によりタイヤ空気圧の低下度合及び車輌が安全に停車できる位置に到達するための必要走行距離Lが演算され、必要走行距離Lに応じて制御ゲインKctが演算され(S100)、タイヤ空気圧が低下している車輪の接地荷重低減制御及び接地荷重の変更に起因する車輌のステア特性の変化を抑制するステアリングギヤ比制御の制御量が制御ゲインKctに応じて増減される(S200、300)。
(もっと読む)
スタビライザ制御装置
【課題】小型でねじり剛性の切り換えを迅速且つ円滑に行い得るスタビライザ制御装置を提供する。
【解決手段】左右一方の車輪に接続される第1トーションバー11と、他方の車輪に接続される第2トーションバー12を備える。第1トーションバーと一体的に回転する回転部材(ロータ21)、及びこの回転部材を回転可能に収容し周方向に少なくとも二つの圧力室を形成すると共に第2トーションバーに接合するハウジング22を有し、流体が充填されているロータリバルブ20に対し、二つの圧力室に対する流体の移動を遮断して第1トーションバーと第2トーションバーとの間の相対的な回転を阻止する連結状態、及び二つの圧力室に対する流体の移動を許容して当該相対的な回転を許容する開放状態の何れか一方の状態に切り換える。
(もっと読む)
車両用スタビライザシステム
【課題】アクチュエータによってスタビライザバーの剛性をアクティブに制御可能な車両用スタビライザシステムの実用性を向上させる。
【解決手段】スタビライザバーが実際に発生させている実ロール抑制力Rrを荷重センサの検出値に基づいて取得し(S32,S38)、車両の旋回状態に基づいてスタビライザバーが理論上発生させるべき理論ロール抑制力Rcを推定する(S33,S39)。そして、それらの差ΔRを求め(S40)、その差ΔRに基づいて、車両に偏荷重が生じているか否かを判断する(S41)。偏荷重が生じている場合には、偏荷重が生じていない場合と同様のロール量となるように、その偏荷重の程度に応じて、アクチュエータの駆動源である電動モータの目標モータ回転角θ*の補正量θ0を決定し(S42)、その補正量θ0による目標モータ回転角θ*の補正を行う。
(もっと読む)
車両用サスペンション装置
【課題】コストの増大を抑制したシンプルな構造でシミーを効果的に低減する。
【解決手段】ステアリングホイール5に入力される振動に対してフロントサスペンションが共振しないようにスタビライザ8の捩り剛性Kfを変更する、つまりステアリングホイール5に入力される振動に応じてスタビライザ8の捩り剛性Kfを変更する。また、ステアリングホイール5に入力される速度振幅Aが所定値As以上のときだけ(ステップS5の判定が“Yes”)、スタビライザ8の捩り剛性Kfの変更を実行すると共に、車速Vがその変化点車速Vc未満となるときに(ステップS7の判定が“Yes”)、スタビライザ8の捩り剛性をKf=1に変更する。
(もっと読む)
車両用スタビライザシステム
【課題】いわゆる衝撃吸収ボデーを採用する車両において、車両衝突時に、スタビライザバーが発揮するロール抑制力によって車体の効果的な変形が阻害されることを回避する。
【解決手段】車両に、一対のスタビライザバー部材を備える電動アクティブスタビライザシステムを装備させ、通常の場合は、電動モータの力によってスタビライザバー部材を、車体が受けるロールモーメントに応じた回転量だけ相対回転させることにより、車両の旋回状態に応じたロール抑制力を発生させる(S4,S5)。それに対して、車両が衝突した場合(S6)または、衝突の蓋然性が高い場合(S7)には、電動モータへの電力供給を禁止し、かつ、電動モータの起電力の発生を禁止して(S9)、ロール抑制力を発生させないようにする。
(もっと読む)
液圧式アンチロールシステム
【課題】特に車輛用のアンチロールシステムを提供する。
【解決手段】本アンチロールシステムは、システム制御手段と、液圧流体用のタンク(4)及びポンプ(3)と、二つ又はそれ以上のスタビライザーとを含む。各スタビライザーはアクチュエータ(5、6)を有する。これらのアクチュエータは、関連したスタビライザーのモーメントを、アクチュエータの端子のところでの液圧とは別個に制御するように構成されている。各アクチュエータは、その端子(A、B)のいずれか一方又は両方が、圧力制御モジュール(8)の第1端子(I)に接続されている。圧力制御モジュール(8)の第2端子(II)は、タンクの入口側に接続されており、第3端子(III)は、ポンプの出口側に接続されている。制御手段及び各制御モジュールは、前記制御手段の制御下でその第1端子のところに流体圧力を供給するように構成されている。圧力制御モジュール(8)は、直列に接続された二つの圧力制御バルブ(1、2)、例えば圧力逃がしバルブ又は制限バルブを含んでいてもよい。変形例として、圧力制御モジュール(8)は、三方圧力制御バルブ(9)、例えば三方減圧バルブを含む。穏やかにカーブを曲がるとき、又は真っ直ぐな線をなして運転するときのポンプのエネルギ消費を小さくするため、圧力制御バルブを三方圧力制御バルブと並列に設ける。 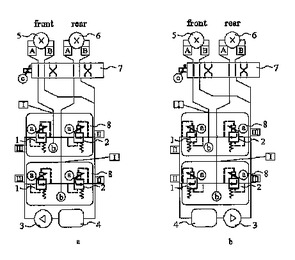 (もっと読む)
(もっと読む)
旋回半径に応じてロール剛性前後比を変更する車輌
【課題】ロールの発生は車輌の旋回走行に基づくものであることに着目し、旋回走行の状態量に基づいて算出された目標ヨーレートに実ヨーレートを一致させる前後輪の間のロール剛性の比の制御よりも即応性に優れた車輌旋回の回頭制御を行う。
【解決手段】後輪のロール剛性に対する前輪のロール剛性の比(ロール剛性前後比)を変化させることができるロール剛性前後比制御手段を有する車輌に於いて、旋回走行の旋回半径に応じて該旋回半径が小さいときには該旋回半径が大きいときに比して前記ロール剛性前後比をより小さくする。
(もっと読む)
車両用サスペンション制御装置
【課題】 駆動系動力源の回転角加速度発生に伴う車両偏向を抑制でき、発進時の走行安定性を向上させることができる車両用サスペンション制御装置を提供する。
【解決手段】 後輪9の動力源(エンジン6およびトランスミッション10)が車両の前輪7側に配置され、動力源の回転軸方向が車両前後方向へ配置された車両において、前輪7のロール剛性を可変するロール剛性可変手段(前輪スタビライザ14)と、回転軸Lに回転角加速度ω'Eが発生したとき、前輪7のロール剛性を高める制御指令をロール剛性可変手段へ出力する演算回路3と、を備える。
(もっと読む)
走行支援装置及び走行支援方法
【課題】横風による舵角の揺れを未然に抑制できる車両制御装置及び車両制御方法を提供する。
【解決手段】風向を含む風情報と道路地図情報とを取得するソース情報取得手段と、
自車の現在位置を特定するロケータと、前記現在地と前記道路地図情報と前記風向とに基づいて走行予定道路上で前記自車が横風を受けると予測される横風区間を設定する設定手段と、前記現在位置及び前記横風区間に基づいて、前記自車が前記横風区間より手前の予め決められた所定地点に到達すると前記自車のロール剛性を上げる制御手段と、を備える車両制御装置。
(もっと読む)
車両用サスペンションの制御方法および装置
【課題】車体の横加速度の発生タイミングとロールの発生タイミングとを考慮してサスペンションの減衰特性またはばね特性を制御することにより、車両の乗り心地および操作性を向上させることのできる車両用サスペンションの制御方法および装置を提供する。
【解決手段】車速および舵角に基づいて、推定横加速度演算手段および推定ロール状態演算手段(ブロックB1)により車体に発生する推定横加速度およびロールの推定ロール状態を演算し、さらに、目標ロール状態演算手段(ブロックB2)により推定横加速度とロール角とが所定の関係になるように目標ロール状態を演算して、ロール状態制御手段(ブロックB3〜B10)により目標ロール状態でのロール角と推定ロール状態でのロール角との偏差に基づいてサスペンションの減衰特性またはばね特性を変更して車体に実際に発生するロールの状態を制御する。
(もっと読む)
161 - 180 / 263
[ Back to top ]