
Fターム[3D301EB45]の内容
車体懸架装置 (72,824) | 制御対象 (5,102) | 他(サス以外)との統合制御 (556) | 推進/駆動制御 (162)
Fターム[3D301EB45]に分類される特許
1 - 20 / 162
発進補助装置およびこれを搭載した発進補助車両
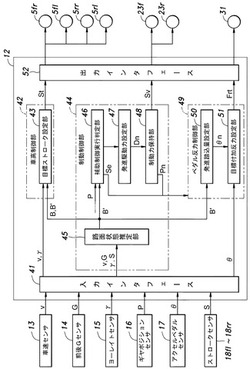
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
鞍乗り型の乗り物の制御装置および制御方法

【課題】一例として自動二輪車のような鞍乗り型の乗り物を対象として、その加速時や制動時における車輪のスリップを抑制し、ひいては乗り物の動力性能および制動能力の向上を図る。
【解決手段】乗り物の走行中に例えば前後の車輪の緩衝装置4,18の特性を変更し、乗り物の姿勢を変化させることで、各車輪の路面に対する接地荷重の分布を変更可能な荷重分布変更手段と、乗り物の走行中に、前後の車輪のうちいずれか一方のスリップを抑制するための抑制条件が満たされたことを判定するスリップ抑制条件判定手段91,92と、その条件の満たされたことが判定された場合、条件の満たされていない場合に比べて前記一方の車輪の接地荷重が増大するように、荷重分布変更手段を制御する荷重分布制御手段93と、を備える。
(もっと読む)
旋回走行制御装置、旋回走行制御方法
【課題】車高に比べてトレッド幅の狭い車両の旋回性能を改善する。
【解決手段】前後輪のロール剛性に対して制限値Kφminを設定する。そして、電動スタビライザ4F及び4Rを駆動制御し、前後輪のロール剛性を個別に調整することで、前後輪のロール剛性を制限値Kφminよりも大きくする。また、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを上限値Pmax=a1Q+b1で定義し、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを下限値Pmin=a2Q+b2で定義する。そして、前後輪ロール剛性配分Pが上限値Pmaxより小さく、且つ下限値Pminより大きくなるように、電動スタビライザ4F及び4Rを駆動制御して、前後輪のロール剛性を個別に調整する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備え、コントローラ500は、加速度方向側の車輪から重心位置までの距離を、加速度方向と反対側の車輪から重心位置までの距離に対して長くなるように設定する。
(もっと読む)
制振装置、振動抑制方法及び制振プログラム
【課題】加振源の状態が変化した場合でも発生する振動の状態を変化前と変わらない状態に保つことができる制振装置を提供する。
【解決手段】不要な振動を抑制するとともに、必要に応じて所定の振動を発生させる制振装置であって、リニアアクチュエータに支持された補助質量を振動させることにより制振対象物を加振する加振手段と、制振対象物を振動させる加振源の周波数を検出する周波数検出手段と、測定点における振動を検出する振動検出手段と、加振源の周波数と前記測定点において検出された振動に基づいて、抑制するべき振動と、発生させるべき振動の指令値を求める演算手段と、抑制するべき振動の指令値と、発生させるべき振動の指令値を重畳させた制御信号を加振手段に出力する制御信号出力手段とを備えるように構成した。
(もっと読む)
車両
【課題】前輪と後輪に付与する駆動力を調整することで車高を変更することができるようにした車両を提供する。
【解決手段】車体12と、車体12の進行方向前側に設けられる前輪14と、車体12の進行方向後側に設けられる後輪16と、前輪14に駆動力を付与する前輪電動モータ18と、後輪16に駆動力を付与する後輪電動モータ20と、前輪14と車体12とを接続する前輪サスペンション22と、後輪16と車体12とを接続する後輪サスペンション24と、前輪サスペンション22および後輪サスペンション24を通じて車体12に重力方向における所定の荷重が生じるように、前輪電動モータ18が前輪14に付与する駆動力の大きさおよび後輪電動モータ20が後輪16に付与する駆動力の大きさを調整する調整手段26とを有するように構成する。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】操舵操作を行ったときに、ロール挙動が増大することを抑制可能とすること。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分である前輪荷重の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、前輪荷重の変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し合計値を基にドライバ要求トルクを補正する。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】輪荷重の変動を抑制しつつ、操舵応答性の向上およびロール挙動の抑制を可能とする。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、当該変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し、合計値を基にドライバ要求トルクを補正する。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
車両
【課題】 旋回性能を向上し、安定して旋回すると共に、簡単な機構で快適な乗り心地の車両を提供する。
【解決手段】 車体2と、車体2に回転可能に取り付けられた車輪4,5であって、車体2を操舵する操舵輪4と、車体2に回転可能に取り付けられた車輪であって、車体2を駆動する駆動輪5と、前記駆動輪を駆動するモータ41と、車体2に連結される支持部材22,23,24,25と、支持部材23,24,25に対して回転可能に連結されると共に、車体2を旋回方向に傾斜させるリンク機構Lと、リンク機構Lを作動するアクチュエータ31と、車体2の旋回時に旋回内側となる車輪5の接地点を中心として車体2の旋回時に旋回外側となる車輪5の接地点にかかるアクチュエータ31の回転による鉛直方向の角加速度が、車体2の旋回時に旋回外側となる車輪5の接地点にかかる自重による鉛直方向の加速度を超えないように、モータ41の駆動トルクを制御する制御部100と、を有する。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、乗員が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、加速操作部材の操作量に基づいて走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。走行制御処理手段は、共振の状態を判定する共振発生状態判定処理手段及び共振の状態に応じて、走行用の駆動部における駆動力の発生を抑制する駆動力抑制処理手段を備える。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、運転者が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行用の駆動部を駆動するための走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両の前後方向における重心の移動量を算出し、最大角加速度を算出し、最大角加速度に基づいて前記傾斜制御用の制御値の変動を制限する制御値制限処理手段を備える。
(もっと読む)
車両
【課題】傾斜制御を精度良く行うことができるようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行制御用の制御値を発生させる走行制御処理手段と、走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両に許容範囲を超えて発生する傾斜状態を判定する傾斜状態判定処理手段、及び傾斜状態に応じて駆動力の発生を抑制する駆動力抑制処理手段を備える。車両に許容範囲を超えて発生する傾斜状態が判定され、判定された傾斜状態に応じて、走行用の駆動部における駆動力の発生が抑制されるので、車両が許容範囲を超えて傾斜させられることがなくなる。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
車体姿勢制御装置
【課題】 車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】 車両走行時のタイヤが常用領域にある間は、ロールレイトに応じて目標ピッチレイトを算出するピッチ制御部23の方をロール抑制部18よりも優先させる。この場合、ピッチ制御部23で算出した目標減衰力に重みを与え、前記目標ピッチレイトとなるように各ダンパ6,9の減衰力特性を制御する。タイヤの路面グリップ状態が悪い限界領域では、ピッチ制御部23よりもロール抑制部18の方を優先させ、ロール抑制部18で算出した目標減衰力に重みを与える。これにより、ロール抑制制御量を大きくするように各ダンパ6,9の減衰力特性を制御する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
1 - 20 / 162
[ Back to top ]