
Fターム[3E080CE02]の内容
瓶の密封 (786) | 密封方法(変形) (51) | 半径方向可動押圧部材によるもの (28) | 回転部材によるもの (22)
Fターム[3E080CE02]の下位に属するFターム
スレットローラによるもの (1)
スカートローラによるもの
両方の協働によるもの (11)
Fターム[3E080CE02]に分類される特許
1 - 10 / 10
キャップおよびその位置決め方法
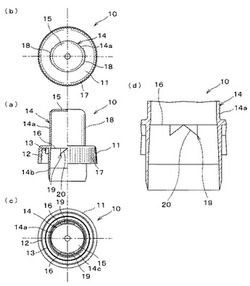
【課題】 容器に着脱するねじ部や嵌着部を有する円筒状の着脱リング部の上方に、横断面形状が真円状でない非円筒状部を備えた有底筒状のキャップであって、印刷等において高精度に位置決めすることができるキャップおよびその位置決め方法を提供する。
【解決手段】 このキャップ10では、位置決め用リブ19を内側段差部16に設けることで、対応する形状の位置決め部材の軸方向への挿入によってガイド面20により位置を微調整して位置決めすることができ、高精度に位置決めすることができる。
(もっと読む)
ライナー付き金属キャップ及びその製造方法並びにキャップ付き容器及びその製造方法

【課題】 通常のキャップ製造ラインでもシーリングマシンのヘッド圧が非常に低い状態で良好な密封性が得られる優れたキャッピング特性を有したライナー付き金属キャップ及びその製造方法並びにキャップ付き容器及びその製造方法を提供すること。
【解決手段】 天板部2と該天板部2の周縁から垂下した筒状周壁部3とからなるキャップ本体4と、天板部2の内面に成形されたライナー5と、を備え、ボトル本体4の雄ねじ部が形成された口部に装着されて螺着状態にキャッピングされると共に天板部3の周縁が前記垂下の方向に肩絞り加工により変形されて口部を密封状態に封じるライナー付き金属キャップ1であって、天板部2の周縁をライナー5と共に前記垂下の方向に変形加工させて傾斜させた環状傾斜部2aを有している。
(もっと読む)
搬送装置
【課題】大きさが異なる各種の被搬送物に容易に対応できる搬送装置を提供する。
【解決手段】搬送装置6は、第1被噛合部61を有する第1回転体11を備え、第1回転体11には一方側挟持体41を設ける。搬送装置6は、第2被噛合部62を有する第2回転体12を備え、第2回転体12には他方側挟持体46を設ける。搬送装置6は、第1被噛合部61と噛合する第1噛合部71および第2被噛合部62と噛合する第2噛合部72を有する歯車66を備える。両挟持体41,46間の離間距離の調整時に、第1回転体11および第2回転体12が互いに異なる方向に同じ回動角度だけ回動する。
(もっと読む)
容器用の充填及び密閉装置
本発明は、容器(6)用の充填及び密閉装置に関し、第1のロボットアーム(11)を備える第1の処理ステーション(1)、第2のロボットアーム(21)を備える第2の処理ステーション(2)、及び定位置の第1のプロセスステーション(4)を含んでおり、第1のロボットアーム(11)は、容器(6)を定位置の第1のプロセスステーション(4)へ搬送するようになっており、第2のロボットアーム(21)は、容器(6)を第1のプロセスステーション(4)から後続の1つのステーション(7)へ搬送するようになっており、定位置の第1のプロセスステーション(4)において少なくとも1つのプロセス工程を実施するようになっている。 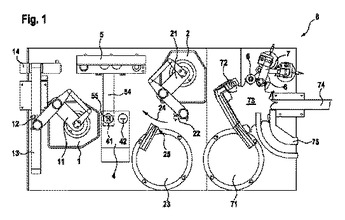 (もっと読む)
(もっと読む)
圧着装置
【課題】容器のフランジの周囲でキャップを圧着するための圧着装置、即ち、容器に損傷を与えない圧着装置を提供する。
【解決手段】容器2のフランジ20の周囲にキャップ21を圧着するための圧着装置1であって、該装置は、ディスク10を有すると共に、該フランジ20の周囲へのキャップ21の圧着を達成するように、ディスク10と、容器2のフランジ20との間の相対的な運動を生成するための手段を有する。該ディスク10は、互いに隣接する第1100のおよび第2101のディスク部材を有し、第2のディスク部材101は、第1のディスク部材100を超えて外側に広がり、かつ容器2の硬度よりも小さい硬度を有する。
(もっと読む)
金属キャップのネジ形成具
【課題】 低コストで簡易に金属キャップにネジを形成できるネジ形成具を提供すること。
【解決手段】 瓶容器Bに被せられた金属キャップCにネジを形成することができる金属キャップのネジ形成具1であって、前記金属キャップCを挿通させることができる貫通孔11を備え、当該貫通孔11の周縁の少なくとも一部は前記金属キャップCにネジを形成できるネジ形成縁21となっている。
(もっと読む)
充填設備
【課題】シーマー装置から充填装置に伝達される振動を防ぎ、充填液の品質の低下や充填精度の低下を防止する。
【解決手段】充填用サーボモータ41により、充填テーブル11を旋回駆動して容器保持部に保持された容器に充填液を順次充填するロータリー式の充填装置1と、シーマー用サーボモータ71により、シーミングテーブル61を旋回駆動して容器に蓋を巻き締めして装着するシーマー装置2と、充填装置1から送り出された容器をシーマー装置2に供給する中間搬送装置3と、充填装置1とシーマー装置2とを同期駆動するために充填用サーボモータ41とシーマー用サーボモータ71とを位相調整可能な同調コントローラ81とを具備し、充填装置1とシーマー装置2のそれぞれの動力伝達装置を含む構成部材を機械的に互いに独立させた。
(もっと読む)
ボトル缶
【課題】 口金部にスカート部を高精度に成形する。
【解決手段】 口金部22は、雄ねじ部6と、該雄ねじ部6の缶軸方向下端に連設されるとともに、下方に向かうに従い漸次拡径された第1周壁部、および該第1周壁部の下端に径方向外方へ凸とされた凸曲面部を介して連設されるとともに、下方に向かうに従い漸次縮径された第2周壁部を備えるスカート部7とを備え、前記第1周壁部のうち、雄ねじ部6の缶軸方向下端の終わり部分6aから、周方向に雄ねじ部6が延在する方向Xと反対方向に向けて少なくとも約180°の領域に位置する部分に、周方向に延在した、若しくは周方向に断続的に点在した凹部7dが形成されている。
(もっと読む)
キャッピング装置用成形ヘッド及びキャッピング装置
【課題】 キャッピング装置における裾締めローラ表面の荒れを防いでその耐久性を向上させ、同時にキャップ裾部や容器口部表面の傷付きを防止すること。
【解決手段】 容器口部10のネジ山13より下側の部分に半径方向で外側に凸となる凸ビード14と半径方向で内側に凸となる環状ビード15とが予め形成され、その容器口部10に被せられる金属製キャップ粗形材1の円筒部5の周面に前記ネジ山13に沿ったネジ溝45を成形するネジ成形ローラ16、およびキャップ粗形材1のスカート裾部を裾締め成形して前記凸ビード14に係止させる裾締めローラ17を有する成形ヘッド20において、裾締めローラ17は、スカート裾部に接触しスカート裾部を裾締め成形する際に、環状ビード15の外周面と所定の幅Lで接触する、環状ビード外周面に倣った形状の当接部44を外周に有し、少なくとも当接部44が非磁性の硬質材料で構成または被覆されている。
(もっと読む)
シール荷重検出方法およびシール荷重検出装置
【課題】巻き締め終了後の荷重FBを検出することにより、ゴム栓4によるシール力を確認する。
【解決手段】ゴム栓4が打栓された容器(バイアル2)に金属キャップ12をかぶせ、このキャップ12の天面部12b側からプレッシャブロック10によって荷重をかけ、前記ゴム栓4を圧縮した状態にして、巻き締めローラ14によって前記キャップ12のすそ(円筒部12aの下端12c)を内側に折り曲げて巻き締めを行う。その後、キャップ天面12bの荷重を解放すると、ゴム栓4が膨張するのでその変位量S1を検出する。予め記憶してある荷重−ゴム栓圧縮量曲線から、キャッピング時の荷重FOに対するゴム栓4の圧縮量HAを求め、さらに、この圧縮量HAから前記変位量S1を減算し、前記曲線により減算した圧縮量HBから対応する荷重FBを求め、この荷重をキャッピング後のシール荷重であると判断する。
(もっと読む)
1 - 10 / 10
[ Back to top ]