
Fターム[3F017AB01]の内容
特殊移送−往復動部材、分離・停止部材 (1,291) | 制御、検知、安全手段を有するもの (39) | 制御手段 (13)
Fターム[3F017AB01]に分類される特許
1 - 13 / 13
選別装置
【課題】選別装置の選別機構周辺における危険区域内で作業する作業員の安全を確保すること。
【解決手段】ワークWが搬入される搬送路11aに対して進退移動可能な押出部材12aを備え、ワークWを検査する検査装置20の検査結果に応じて押出部材12aを進退移動させることにより、ワークWを搬送路11a上を通過又は搬送路11a外に押し出して振り分け選別する選別装置1において、押出部材12aの進退移動による選別動作が行われることを報知する報知部13と、押出部材12aの進退移動による選別動作を開始する所定時間前に報知するように報知部13を制御する制御部17とを備えた。
(もっと読む)
選別装置

【課題】運転開始時の安全性の向上を図る。
【解決手段】選別装置1は、検査装置30の検査結果に応じて押出部材11を進退移動させ、被検査体Wを搬送路2a上を通過又は搬送路外に押し出して振り分け選別するものであり、検査装置30から運転開始命令を受けて押出部材11が初期位置にないことを検出手段5が検出したときは運転を禁止する。押出部材11を手動で初期位置に戻し、押出部材11が初期位置にあることを検出手段5が検出して検査装置30から運転開始命令を受けると、被検査体Wを搬送路2aに搬入させて運転を開始する。
(もっと読む)
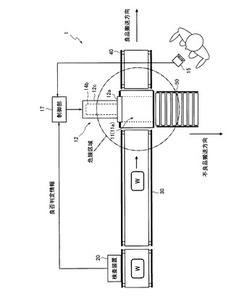
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
分岐装置
【課題】コンベヤにより経路を搬送される物品の形態、又は配置に関わりなく、アームの旋回する速度を適切に設定できる分岐装置を提供する。
【解決手段】分岐装置9は、経路5に対して分岐路7の反対側に配置された回転軸13と、回転軸13の径方向に延出するアーム19と、アーム19に支軸21を介して回動自在に支持されたプッシャー23,24と、アーム19を回転軸13の周りで旋回させる駆動手段25と、プッシャー23の姿勢を維持する姿勢維持手段27とを備える。駆動手段25が、プッシャー23を分岐路7から後退させた位置でアーム19の旋回を停止させる。コンベヤに搬送される物品3がプッシャー23に対面したとき、駆動手段25が、プッシャー23を分岐路7に前進させる向きにアーム19を旋回させる。
(もっと読む)
レバー旋回式移載装置
【課題】鋼管や丸棒の搬送ラインにおいて用いられる移載装置として、効率的に鋼管や丸棒の移載を行うことができるレバー旋回式移載装置を提供する。
【解決手段】方向制御弁21から第2油圧シリンダー13bの間でかつ第1油圧シリンダー13a分岐以降のA系統配管とB系統配管のそれぞれにシャットオフ弁23が組込まれており、これによって、移載する鋼管30の負荷(寸法、重量)に応じて、駆動させる油圧シリンダー13の数を変更できるようになっている。
(もっと読む)
搬送装置
【課題】搬送用バケットが載せられる台車および受け台と、該バケットを台車から受け台に移送する移送装置とを備える搬送装置による台車から受け台へのバケットの搬送作業の効率の向上を図る。
【解決手段】搬送装置1は、搬送用バケットBに当接しない退避位置およびバケットBに当接可能な当接可能位置を占める搬出用当接部51および位置決め用当接部52と、当接部51,52を移送方向に駆動する駆動部60とを備える。駆動部60は、当接可能位置の当接部52および退避位置の当接部51を搬入方向に駆動して、バケットBと当接状態にある当接部52により、バケットBを搬入方向に所定位置Pまで台車2上で移動させた後、当接可能位置の当接部51,52を搬出方向に駆動してバケットBと当接状態にある当接部51により、所定位置PのバケットBを搬出方向に台車2から搬送台3まで移動させる。
(もっと読む)
トレー搬送装置
【課題】操作プッシュレバーの待機を回避してダイス分類機の効率を高めること。
【解決手段】緩衝ゾーンと操作ゾーンを含む搬送ステージと、搬送ステージに設置し緩衝ゾーンにあるトレーを押し上げて搬送ステージで移動させるための搬入用プッシュレバーと、搬送ステージに設置し操作ゾーンにあるトレーを押し上げて搬送ステージ上で移動させるための操作プッシュレバーと、搬送ステージから搬出されるトレーに載せるための搬出ステージとを含み、搬入用プッシュレバーと操作プッシュレバーは同様に作動し、操作プッシュレバーが操作ゾーンにあるトレーを搬出ステージに押し上げると、搬入用プッシュレバーは緩衝ゾーンにあるトレーを操作ゾーンに押し上げる。
(もっと読む)
モータ制御装置及び方法
【課題】石炭付着防止用スクレーパ14に連結されているチェーン13にトラブルが発生する前に、チェーン13を駆動する駆動ローラ11を停止させる。
【解決手段】石炭をミルに取り込むための取り込み口であるシュート部10と、シュート部10に付着した石炭を掻き取るスクレーパ14と、スクレーパ14が石炭を掻き取るのに必要な動力を提供する駆動ローラ11と、が設けられた石炭取込み設備1における駆動ローラ11の電動モータ17を制御する装置1であって、電動モータ17に流れる電流について所定以上の電流を所定時間以上検知した場合に作動するリレー30を備え、電動モータ17はリレー30が作動することにより停止することを特徴とする。
(もっと読む)
容器排除装置
【課題】排出する容器の転倒と後続の容器への接触を防止し、容器を回転させることなく安定して排出することができる容器排除装置を提供する。
【解決手段】容器排除装置は、搬送される容器1の高さ方向に延びる回転シャフト22と、回転シャフト22に取り付けられた回転部材30と、回転部材30の一端部に取り付けられた回転ローラ34と、回転シャフト32を中心に回転部材30を回転させて回転ローラ34を搬送経路上に位置させ、搬送される容器1を回転ローラ34に接触させて搬送経路の外側へ移動させるサーボモータ20とを備える。
(もっと読む)
流動性食品を入れたパッケージに接着される開口装置を送る装置
記載しているのは、流動性食品の各密封包装に取付けるいくつかの開口装置3の送り経路Aに沿って動作するシークエンシング・ユニット1であって、少なくとも一列に配列される開口装置3を搬送する搬送手段10と、経路Aに沿って搬送手段10の下流の、開口装置3と相互作用する解除可能な停止手段11であって、解除可能な停止手段11が経路Aに沿って開口装置3を引き止める第1の構成に通常設定されると共に、開口装置3の移動を可能にする第2の構成に動かせるものである停止手段11とを有するユニット1であり、さらに、ユニット1は、開口装置が停止手段11を通って順々に及び予め定められた速度で送られるように停止手段11を第1の構成から第2の構成まで動かすために、予め定められた間隔で停止手段11を通り越して移動する押動手段12も有する。 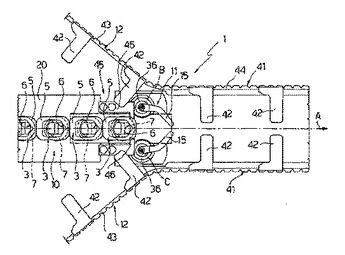 (もっと読む)
(もっと読む)
紙葉類処理装置におけるダイバータゲートの自己診断装置
【課題】 ダイバータゲートの初期位置と動作後の位置を検知するセンサを設け、ダイバータゲートを動作させたときのセンサ出力を判別することによってダイバータゲートの自己診断装置を行うことができる紙葉類処理装置におけるダイバータゲートの自己診断装置を提供する。
【解決手段】 ダイバータゲート装置420のロータリーソレノイド422の一方の側面から突出した軸423には、ダイバータゲート421a、421bが設けられている。上記ロータリーソレノイド422は、正電圧(+)又は負電圧(−)を付与することによってダイバータゲート421a、421bを位置(A)又は位置(B)方向に所定の角度回動する。さらに、ロータリーソレノイド422の他方の側面から突出した軸423には、プレート424が軸支されており、軸423の回動に伴って回動する。また、このプレートは、プレート検知センサ425a及び425bによって検知される。
(もっと読む)
選別装置
【課題】異常物品を排斥する選別装置において、異常物品が排斥されたことをより確実に検知する。
【解決手段】正常物品及び異常物品を含む物品のうち異常物品を排斥する選別装置100は、物品1を搬送する搬送路10と、異常物品1が排斥される排斥領域30と、搬送路10を通る物品1のち異常物品1を排斥領域30に排斥する排斥機構20と、搬送路10から排斥領域30に排斥される異常物品1が通過する領域52a、54aを上方から監視しながら搬送路10から排斥領域30に異常物品1が排斥されたことを検知するセンサ52、54を含み排斥機構20が排斥動作をした際に排斥領域30に異常物品1が排斥されたことをセンサ52、54によって確認する排斥確認ユニット50とを備える。
(もっと読む)
物品の搬送方法及び装置、並びに加工機
【課題】 物品の変形や寸法誤差の累積の影響を受けにくくし、連続投入に近い状態で物品を安定搬送可能とし、各種加工機の生産効率の向上、加工品質の向上を図る。
【解決手段】 搬送入側から送り込まれた被加工物品5を、被加工物品5の進行方向後方から押す第1のプッシャー10と、第1のプッシャー10を搬送方向と略平行に移動させる第1の駆動系と、前記搬送入側から送り込まれた被加工物品5を、被加工物品5の進行方向後方から押す第2のプッシャー20と、第2のプッシャー20を搬送方向と略平行に移動させる第2の駆動系とを用い、前記第1及び第2のプッシャー10,20のうち一方のプッシャーが進行して物品を搬送している期間中に他方のプッシャーが後退して前記搬送入側に送り込まれた被加工物品5の後方位置に戻る構成である。
(もっと読む)
1 - 13 / 13
[ Back to top ]