
Fターム[3F022NN26]の内容
Fターム[3F022NN26]の下位に属するFターム
減速度制御 (34)
Fターム[3F022NN26]に分類される特許
1 - 20 / 33
天井走行車システム
【課題】
坂道軌道の途中で搬送台車に異常が生じた際に、天井走行車を退避させることにより、後続の天井走行車が渋滞しないようにすると共に、退避させた天井走行車が他の天井走行車と干渉しないようにする。
【構成】
天井スペースに設けられた軌道に沿って天井走行車が走行する。軌道として、高低を変えて少なくとも2個所に設けれられている水平軌道と、水平軌道間を接続する坂道軌道と、坂道軌道から分岐して天井走行車を退避させると共に、退避中の天井走行車が坂道軌道へ誤進入することを防止するように構成された退避軌道、とを備えている。
(もっと読む)
物品搬送装置

【課題】左右駆動用モータの回生電力を有効に活用できる物品搬送装置を提供すること。
【解決手段】上下駆動用モータ及び左右駆動用モータの一方にて発生する回生電力を回収して他方に供給自在な回生電力回収供給手段が設けられ、左右移動制御部が左右速度パターンの左右減速期間により与えられる速度変化に従って移動体を減速させる期間と、上下移動制御部が上下速度パターンにより与えられる速度変化に従って移動体を上昇させる期間とが重複するように、上下速度パターンを決定するとともに移動体の移動を開始させた移動開始タイミングよりも遅延時間だけ遅い上昇開始タイミングに移動体の上昇を開始させる物品搬送装置。
(もっと読む)
無人搬送車および走行制御方法
【課題】障害物を回避する無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】経路データ上に、回避距離を予め設定しておき、進行方向前方に障害物1701を検知すると、回避距離だけ横行した後、前方へ走行することを特徴とする。また、回避距離は、回避方向と共に経路データにおける区間毎に設定されていてもよい。さらに、回避経路を走行中に取得した計測データに、障害物1701が検出されなくなったときから、車長+所定距離だけ前方に移動した後、元の経路1702に戻る。
(もっと読む)
搬送装置
【課題】外部入力信号機器を減らすことができる搬送装置を提供する。
【解決手段】搬送経路上にてパレット21を搬送または停止する搬送装置10であって、パレット21はチェーン25を備え、チェーン25に歯合するスプロケット31と、スプロケット31を駆動し、モータ33と、モータ33の回転角を検出するエンコーダ34と、を備え、エンコーダ34からの検出値に基づいてモータ33の回転を制御するサーボモータ機構32と、サーボモータ機構32によってパレット21の搬送または停止を制御するコントローラ50と、を具備し、コントローラ50は、パレット21が基準位置を通過したときをサーボモータ機構32のエンコーダ34によって0点基準位置として検出し、0点基準位置からの積算検出値に基づいて、パレット21を搬送または停止する。
(もっと読む)
物品搬送設備
【課題】緊急地震速報を受信した場合に、長時間に亘って設備の運転が停止することを極力防止できる物品搬送設備を提供すること。
【解決手段】受信端末が緊急地震速報を受信すると、電力供給手段を供給状態に維持したまま搬送装置の搬送作動を停止させる通常停止制御を行い、受信端末が緊急地震速報を受信してから設定時間Tが経過するまでの待機期間中は、地震検出手段の検出情報に基づいて、電力供給手段を非供給状態に切り換える必要があるか否かを判別し、非供給状態に切り換える必要があると判別した場合には非供給状態に切り換え、かつ、待機期間中における地震検出手段の検出情報に基づいて、搬送装置の搬送作動の再開を許容するか否かを判別し、再開を許容すると判別した場合には搬送装置の搬送作動を再開する。
(もっと読む)
棚設備
【課題】昇降自在に吊持された棚の停止位置を高精度に制御することができる棚設備を提供する。
【解決手段】棚設備10は、棚11と、棚11を昇降自在に吊持する吊持材12と、吊持材12を送り出すことにより、棚11を昇降させる駆動機構13と、予め定められた高さにおける棚11の有無を検出する棚検出器14と、駆動機構13による吊持材12の送り出し量を検出する送出量検出器15と、駆動機構13を制御する制御部20とを備え、制御部20は、棚検出器14によって棚11が検出された際に送出量検出器15によって検出される送り出し量に基づいて、駆動機構13を制御して棚11を停止させる停止制御部21を有する。
(もっと読む)
移動体システム
【課題】 オーバーシュートによりインポジション範囲から抜け出す可能性の有無を、迅速かつ正確に判定する。
【構成】 移動体の位置と速度と加速度とを求めるためのセンサと、求めた位置と速度と加速度とに基づいて、移動体の停止位置をインポジション範囲内か否かを推定するための推定手段とを設ける。
(もっと読む)
移動体と搬送システム及び搬送方法
【課題】簡単な処理で、2次元あるいは3次元のスペースを移動する移動体間の干渉を防止する。
【解決手段】2次元方向に移動自在な搬送用の移動体2を複数設け、移動体2が移動する予定の軌跡を移動体2毎に算出する軌跡算出手段16と、他の移動体2が移動する予定の軌跡を把握する軌跡把握手段と、移動体2間の軌跡の重なりの有無を、軌跡が重なる箇所の通過時刻を無視して判定するための判定手段と、軌跡が重なると判定した際に、軌跡が重なる箇所を迂回するように迂回路を算出するための迂回路算出手段16、とを備える。
(もっと読む)
搬送装置
【課題】 無端のベルトやチェーン、ワイヤー等の動力伝達部材の緩み検出を、その張力変動の影響を受けることなく確実に行なうことのできる緩み防止部を備えた搬送装置を提供する。
【解決手段】 駆動側ギア32A(32B)と従動側ギア35A(35B)との間に無端のベルト30A(30B)を掛け渡し、搬送部20を移動させる搬送装置において、ベルトの緩みを生じやすい場所に、ベルトから所定の間隔を空けて緩み防止部40A(40B)を設置する。緩み防止部はベルトの接触によりその緩みを検出して検出信号を出力する。制御部1は、前記検出信号を受けると緩み検出の報知を含む所定の動作を実行するが、例えばベルトの加速、あるいは減速時における設定時間内に前記検出信号を受けた時には、前記所定の動作を実行しない。
(もっと読む)
物品収納設備
【課題】スタッカークレーンや物品収納棚が地震によって揺れることがあっても、物品収納設備を再稼働させるにあたって、復旧作業に手間が掛かり難い物品収納設備を提供する。
【解決手段】物品収納棚の前面側に設定された走行経路に沿って走行自在なスタッカークレーンと、地震による損傷を回避するべくスタッカークレーンの作動を制御する制御手段とを備えた物品収納設備であって、地震による揺れが発生するまでの予測時間を示す予測時間情報を取得する予測時間取得手段を備え、制御手段は、予測時間情報が示す予測時間が設定時間以下のときは、スタッカークレーンを即時停止させる即時停止用回避処理を実行し、予測時間が設定時間を越えるときは、スタッカークレーンを前処理動作にて動作させてから停止させる前処理動作付き停止処理を実行するように構成されている。
(もっと読む)
自動倉庫および自動倉庫の制御方法
【課題】地震時に万一物品が落下した場合でも、スタッカクレーンが受ける損傷の軽減を図る自動倉庫を提供する。
【解決手段】個々に物品を収納可能な複数の収納部を縦横に連ねてなるラック2と、ラック2に沿って走行し、縦に一連の収納部である列ごとの移載位置Aに停止してラック2に物品を出し入れするスタッカクレーン1と、スタッカクレーン1の動作を制御する制御装置と、地震の発生を知らせる速報データを受信する受信機とを備え、制御装置は、受信機にて速報データが受信されると、スタッカクレーン1を、隣接する2列の移載位置の間の位置B、Cに停止させる。
(もっと読む)
物品搬送設備
【課題】移動体を制動できない状態で移動体の移動を開始することを防止できる物品搬送設備を提供すること。
【解決手段】駆動手段(M1)にて移動自在な物品搬送用の移動体と、移動体の移動を制動する制動状態と制動解除状態とに切り換え自在な制動手段(B)と、駆動手段及び制動手段を制御する制御手段(7)とが設けられ、制御手段が、制動手段を制動状態にし且つ駆動手段を駆動させるべく駆動手段及び制動手段を制御する制動状態確認用処理を制動状態確認用タイミングにおいて実行するように構成されている物品搬送設備。
(もっと読む)
スタッカクレーンの昇降体の高低差補正方法
【課題】チェンやベルト、ワイヤロープなどの伸びによる昇降体の前後の高低差を補正し、昇降体を水平に上下し搬送物を移載する際の位置誤差を低減することができるスタッカクレーンの昇降体の高低差補正方法を提供すること。
【解決手段】前後のマスト1、2に独立した昇降駆動装置を設け、これら前後の昇降駆動装置を同期して駆動することにより昇降体3を上下移動するスタッカクレーンにおいて、前後のマスト1、2に複数の位置補正点を設け、昇降体3が位置補正点を通過した際の駆動位置データから前後の高低差を推定し、次回以降の運転で目的位置の座標に補正値を加算し、位置補正点での高低差を補正するようにする。
(もっと読む)
昇降ユニット用制動装置
【課題】昇降ユニットを定位置で停止状態に保つ手段として従来の電磁ブレーキを採用せず、静音であって省スペースに構成することができ、また減速ギアのギア歯が欠けることなく昇降ユニットを停止状態に保つことができる昇降ユニット用制動装置を提供する。
【解決手段】巻取パイプ8の両端を回動自在に支承するユニットケース7の外側に固定されたスプリングホルダ15と、コイル状に巻回された弾性線材の両端が対向位置にて内側に突出してなる一対の爪19a、19bを有するスプリングクラッチ19と、巻取パイプ8の端部に形成された円弧形のブレーキ片9と、減速機17の出力軸20の端部に形成された円弧形の出力軸片21とを備え、スプリングクラッチの一対の爪を挟んで、スプリングクラッチを縮径する側に減速機の出力軸片が配置されると共に、スプリングクラッチを拡径する側に巻取パイプのブレーキ片が配置された構成を有する。
(もっと読む)
搬送方法およびこの方法を実施する搬送手段の制御システム
【課題】天井走行クレーンによるパワーアシストを得て、作業者が望む方向へ望む速度で搬送物を移動させる搬送方法において、従来まで制御不可能であった搬送物の姿勢を制御することが可能な搬送物の搬送方法を提供する。
【解決手段】上端がワイヤロープの下端に連結されかつ張力検出手段を付設したロープと、上端がワイヤロープの下端に連結されかつ張力検出手段を付設した電動シリンダロープとによって構成された懸吊手段の下端間に、搬送物を装架させて接続して搬送物を吊り下げ、その後、搬送物に作用する操作力と搬送物の重量による負荷を張力検出手段によってそれぞれ検出し、これらの張力検出手段による検出値からヤコビ行列(JT )−1を用いて、 電動シリンダを収縮作動させるとともにサーボモータを同期化制御して搬送物の姿勢を制御することを特徴とする。
(もっと読む)
昇降装置の停止位置制御方法
【課題】 ワイヤロープの伸びにより停止位置を修正する時間を省略するため、減速開始の点を正確に決めるようにする。
【解決手段】 ワイヤロープ30でリフトケージ29を吊り下げ支持させて昇降させるようにして車両37を入庫又は出庫させるようにするエレベータパーキングにおいて、ワイヤロープ30で吊り下げ支持されているリフトケージ29に車両37を載せることによりワイヤロープ30が伸びると、伸びた状態のワイヤロープ30で吊り下げ状態のリフトケージ29を目的の位置まで昇降させる距離を計算で求めて減速点を決める。しかる後、減速点まで昇降させ、減速点から減速させて停止位置に停止させるようにする。
(もっと読む)
物品搬送装置
【課題】適正に移載を行うことができながら、物品搬送にかかる時間の短縮化を図ることができる物品搬送装置の提供。
【解決手段】移載装置12には、上下方向に幅を有する範囲を検出範囲Kとして、ビーム8までの上下方向の距離を検出するビーム検出センサ22が設けられ、制御手段は、上下方向において目標移載位置よりも手前に移載装置12を移動させたときにビーム検出センサ22にてビーム8までの上下方向の距離を検出するビーム検出作動を行い、そのビーム検出作動におけるビーム検出センサ22の検出情報に基づいて目標移載位置に移載装置12を昇降させるべく、昇降駆動手段の作動を制御するように構成されている。
(もっと読む)
搬送装置
【構成】 インバータの起動からブレーキの開放までに時間差を置いて、モータ出力が先に得られるようにしてから、ブレーキを開放する。またインバータの停止に先行してブレーキに閉成信号を入力し、先にブレーキが動作してからモータが停止するようにする。
【効果】 駆動軸の起動時や停止時の搬送装置の妄動を防止できる。
(もっと読む)
搬送装置
【課題】モータ間の干渉による搬送装置の振動を抑制する。
【解決手段】指令パルスに対する位置誤差を加減算器16で求めて、位置制御器2で速度指令を発生し、速度指令との速度誤差を加減算器18で求め、速度制御器4で電流指令を発生し、マスターモータM1に加える。スレーブモータ側の速度をパルスジェネレータで求めて速度指令からの誤差を求め、スレーブ側の電流指令を発生する。マスター側の電流指令とスレーブ側の電流指令を加減算器21で組み合わせて、スレーブモータM2に加える。
(もっと読む)
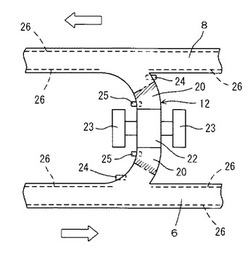
走行台車
【構成】 前後2輪の走行車輪を各2台のサーボモータで駆動し、走行時には4台のサーボモータを全てマスターとして、速度指令をサーボアンプに入力して制御する。停止時には、走行モータM1をマスターに他のモータM2〜M4をスレーブとする。
【効果】 高加速で走行しかつ速度指令に高速応答でき、停止時には走行モータ間で干渉が生じない。
(もっと読む)
1 - 20 / 33
[ Back to top ]