
Fターム[3F022NN27]の内容
Fターム[3F022NN27]に分類される特許
1 - 20 / 34
自動倉庫設備
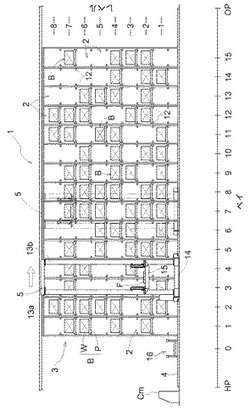
【課題】地震の揺れによる損傷を極力抑制できる自動倉庫設備を提供すること。
【解決手段】物品収納棚3が、棚奥行き方向に並べて配置される前後一対の支柱6a・6bからなる支柱対6を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で支柱対の間に収納部2が位置するように構成され、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、スタッカークレーン5の作動を制御する制御手段が、スタッカークレーンを走行作動させている場合において、揺れ予測情報取得手段が揺れ予測情報を取得すると、地震対策処理としてベイごとに設定された走行停止位置にスタッカークレーンを停止させるべく、スタッカークレーンの作動を制御するように構成されている。
(もっと読む)
走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体

【課題】被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置を提供する。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
(もっと読む)
スタッカクレーン
【課題】走行作動と昇降作動とのそれぞれで適切な省電力化を図ることができるスタッカクレーンを提供すること。
【解決手段】制御手段が、走行台車が定格走行速度で走行し、かつ、昇降台が定格昇降速度で昇降するように搬送制御を実行する定格運転モードと、走行台車が、走行作動に関して省電力に適した省電力運転用走行速度で走行し、かつ、昇降台が、昇降作動に関して省電力に適した省電力運転用昇降速度で昇降するように、搬送制御を実行する省電力運転モードとに切り換え自在に構成されているスタッカクレーン。
(もっと読む)
物品搬送設備
【課題】搬送装置の搬送作動時にサーボ制御される電動モータを停止状態にて制動するときの電力の低減を図ることができながら、必要な搬送能力を維持することができる物品搬送設備を提供すること。
【解決手段】電動モータを制動する制動状態と制動を解除する解除状態に切換自在で、電力供給時に解除状態に、非供給時に制動状態に切り換える制動手段と、高負荷状態か低負荷状態かを判別する負荷状態判別手段とが設けられ、制御手段が、高負荷状態において、電動モータを停止状態に維持するときは、制動手段を解除状態にしかつ駆動制御手段によるサーボロックにて電動モータの回転作動を制動し、低負荷状態において、電動モータを停止状態に維持するときは、駆動制御手段による電動モータのサーボ制御を中断しかつ制動手段を制動状態に切り換えることで電動モータの回転作動を制動する物品搬送設備。
(もっと読む)
スタッカクレーン
【課題】スタッカクレーンの重量の増加を可及的に抑えてマストを補強する。
【解決手段】スタッカクレーン3は、上ガイドレール及び下ガイドレール21bに沿って移動可能である。スタッカクレーン3は、走行台車23と、左マスト25a及び右マスト25bと、昇降台27と、制御盤31と、ブラケットと、を備えている。走行台車23は、下ガイドレール21bに案内される左走行車輪23a及び右走行車輪23bを走行方向の両端部に有する。左マスト25a及び右マスト25bは、走行台車23の左走行車輪及び右走行車輪の内側に固定される。左マスト25a及び右マスト25bは、上下方向に延びている。昇降台27は、左マスト25a及び右マスト25bに沿って昇降可能である。制御盤31は、スタッカクレーン3を制御する。ブラケットは、右マスト25bと走行台車23とに固定され、制御盤31を載置するためのものである。
(もっと読む)
無人搬送車および走行制御方法
【課題】障害物を回避する無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】経路データ上に、回避距離を予め設定しておき、進行方向前方に障害物1701を検知すると、回避距離だけ横行した後、前方へ走行することを特徴とする。また、回避距離は、回避方向と共に経路データにおける区間毎に設定されていてもよい。さらに、回避経路を走行中に取得した計測データに、障害物1701が検出されなくなったときから、車長+所定距離だけ前方に移動した後、元の経路1702に戻る。
(もっと読む)
走行車システム
【課題】回生電力を有効活用することができる走行車システムを提供する。
【解決手段】複数の走行車100と、複数の走行車100の走行を制御するコントローラ300とを備える走行車システム10であって、複数の走行車100のそれぞれを電気的に接続するとともに、複数の走行車100のそれぞれに電力を供給する電力線210を備え、複数の走行車100のそれぞれは、電力線210を介して電力が供給されて駆動し複数の走行車100のそれぞれを走行させる走行モータ120を有するとともに、減速時に電力線210を介して他の走行車に供給する回生電力を発生させ、コントローラ300は、複数の走行車100のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。
(もっと読む)
物品搬送設備
【課題】緊急地震速報を受信した場合に、長時間に亘って設備の運転が停止することを極力防止できる物品搬送設備を提供すること。
【解決手段】受信端末が緊急地震速報を受信すると、電力供給手段を供給状態に維持したまま搬送装置の搬送作動を停止させる通常停止制御を行い、受信端末が緊急地震速報を受信してから設定時間Tが経過するまでの待機期間中は、地震検出手段の検出情報に基づいて、電力供給手段を非供給状態に切り換える必要があるか否かを判別し、非供給状態に切り換える必要があると判別した場合には非供給状態に切り換え、かつ、待機期間中における地震検出手段の検出情報に基づいて、搬送装置の搬送作動の再開を許容するか否かを判別し、再開を許容すると判別した場合には搬送装置の搬送作動を再開する。
(もっと読む)
搬送システム
【課題】搬送システムにおいて、物品の転倒容易度を正確に得る。
【解決手段】搬送システムは、物品Wを搬送するシステムであって、搬入コンベア3と、速度制御部45と、第2光電センサ13と、判定部49とを備えている。搬入コンベア3は、物品Wを載置して移動する。速度制御部45は、物品Wを載置して移動中の搬入コンベア3の速度を制御する。第2光電センサ13は、減速時の物品Wの挙動を検出する。判定部49は、第2光電センサ13によって検出された物品Wの挙動に基づいて転倒容易度を判定する。
(もっと読む)
走行車とその走行制御方法
【課題】 3相誘導走行モータを備えた走行車を、目標速度パターンに従って走行させる。
【構成】 走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとにより、3相誘導走行モータの駆動用インバータを制御する。
(もっと読む)
スタッカクレーン
【課題】スタッカクレーンの移載装置上で積載物の重心の位置が作動許容範囲にあるか否かを検出することができるようにする。
【解決手段】フォーク装置23を構成する支持枠24の一対の側枠242,243の上部にはチェーン26,27の一端が荷重検出器28A,28Bを介して接続されている。フォーク装置23の重量は、荷重検出器28A,28Bに等分に配分される。荷重検出器28A,28Bによって検出された分荷重検出情報は、スタッカクレーン12に設けられた副制御コンピュータC2へ送られる。副制御コンピュータC2は、パレットPと物品Uとを合わせた積載物Wの重心Gの位置を算出する。算出された重心Gの位置が予め設定された作動許容範囲L内にない場合、副制御コンピュータC2は、スタッカクレーン12の作動を禁止する
(もっと読む)
スタッカクレーンの制振方法
【課題】製造コストの上昇を招くことなく、発生する昇降台の自由振動の振幅を小さくして、作業効率を向上させるスタッカクレーンの制振方法を提供する。
【解決手段】増速領域、等速領域、及び減速領域を備えた速度パターンで走行レール11上を往復走行可能な走行台車12と、これに立設された昇降マスト13と、搬送物13aを搭載し昇降マスト13に沿って昇降する昇降台14を有するスタッカクレーン10の制振方法であって、昇降台14及び搬送物13aの重量と昇降台14の高さ位置に基づいて、スタッカクレーン10の固有振動周期を予め求め、この2倍以上の整数倍の時間に増速領域及び減速領域の時間を設定し、増速領域及び減速領域の各加速度パターンを、左右対称の増加及び減少加速度と負の増加及び負の減少加速度として、搬送物13aを搭載した昇降台14の増速領域及び減速領域の終了後に発生する自由振動の振幅を小さくする。
(もっと読む)
物品収納設備
【課題】スタッカークレーンや物品収納棚が地震によって揺れることがあっても、物品収納設備を再稼働させるにあたって、復旧作業に手間が掛かり難い物品収納設備を提供する。
【解決手段】物品収納棚の前面側に設定された走行経路に沿って走行自在なスタッカークレーンと、地震による損傷を回避するべくスタッカークレーンの作動を制御する制御手段とを備えた物品収納設備であって、地震による揺れが発生するまでの予測時間を示す予測時間情報を取得する予測時間取得手段を備え、制御手段は、予測時間情報が示す予測時間が設定時間以下のときは、スタッカークレーンを即時停止させる即時停止用回避処理を実行し、予測時間が設定時間を越えるときは、スタッカークレーンを前処理動作にて動作させてから停止させる前処理動作付き停止処理を実行するように構成されている。
(もっと読む)
搬送車
【課題】走行中の慣性力により物品が傾くことを防止する。
【解決手段】物品8を移載装置10の支持部で支持しながら走行する搬送車において、搬送車の走行方向に沿った物品の幅よりも、走行方向に沿った支持部の幅を狭くするとともに、搬送車の走行方向に沿って支持部の前後でかつ支持部よりも低い位置に、支持部から傾いた物品8を検出するセンサ26を設け、さらに該センサ26で物品を検出すると、搬送車を減速させる制御部28を設けた。
(もっと読む)
スタッカクレーンの制振制御方法
【課題】簡易な方法で確実にマストの揺動を低減するようにしたスタッカクレーンの制振制御方法を提供すること。
【解決手段】2値の加速度の切替によりスタッカクレーンのマスト揺動の固有周波数成分を加振減となる速度と加速度から除去した運転パターンによりスタッカクレーンの振動を抑制するようにする。特に、運転パターンからマスト揺動の固有周波数の3次高調波成分を速度指令値の移動平均により除去し、振動を抑制することにより、簡易な方法でスタッカクレーン本体だけでなく、それに付設の昇降体や移載機等の機械的な余分な振動をも抑制する。
(もっと読む)
物品搬送装置
【課題】長尺柔軟体の固有振動数が低い場合でも不都合がなく、かつ、走行体が停止するときに逆走しないような制振走行速度パターンを生成することができる物品搬送装置を提供すること。
【解決手段】制御手段(27)が、長尺柔軟体の振動を抑制するべく、振動抑制用の制振走行速度パターンを生成して、この制振走行速度パターンに基づいて走行駆動手段(HD)を作動させるフィードフォワード制御により走行体の走行を制御するように構成され、フィードフォワード制御として、長尺柔軟体の振動モデルの逆システムにより、制振走行速度パターンを生成するように構成されている物品搬送装置を構成した。
(もっと読む)
物品搬送装置
【課題】走行体の走行作動中における複数の振動モードによる長尺柔軟体の振動を抑制することができる物品搬送装置を提供すること。
【解決手段】走行体に吊り下げ状態又は立設状態で装備された物品支持用の長尺柔軟体と、走行体を設定された走行速度パターンにて走行させるべく、走行速度パターンに基づいて走行駆動手段(HD)を作動させて、走行体の走行を制御する制御手段(27)とが設けられ、長尺柔軟体の走行体側の端部箇所に、当該端部箇所における変形量に対応した検出情報を出力する歪ゲージ(S)が設けられ、制御手段が、長尺柔軟体の振動を抑制するべく、走行体の走行作動中における歪ゲージの検出情報に基づいて、走行速度パターンを補正するフィードバック制御により走行体の走行を制御するように構成されている物品搬送装置。
(もっと読む)
搬送装置
【課題】モータ間の干渉による搬送装置の振動を抑制する。
【解決手段】指令パルスに対する位置誤差を加減算器16で求めて、位置制御器2で速度指令を発生し、速度指令との速度誤差を加減算器18で求め、速度制御器4で電流指令を発生し、マスターモータM1に加える。スレーブモータ側の速度をパルスジェネレータで求めて速度指令からの誤差を求め、スレーブ側の電流指令を発生する。マスター側の電流指令とスレーブ側の電流指令を加減算器21で組み合わせて、スレーブモータM2に加える。
(もっと読む)
スリップ検出システム
【課題】搬送台車の車輪の定常的なスリップを検出する。
【解決手段】少なくとも3輪の車輪10を備え、該車輪10のうち少なくとも2輪をそれぞれ異なるモータ8で駆動し、各モータ8には、該モータ8を制御する制御装置4が備わっており、各制御装置4からモータ8を制御するための制御情報4を取得し、取得した制御情報4を基に、車輪10の定常的なスリップを検出する情報比較部11,12を有することを特徴とする。
(もっと読む)
搬送設備とその制御方法
【課題】スタッカクレーンなどの搬送設備において、マスト上部に加速度計を取り付けたりせずに制振制御できるようにする。
【解決手段】スタッカークレーン2を停止し駆動車輪14をロックした際に、レーザ距離計20で台車の位置を測定し、その振動数をマスト8の固有振動数とし、走行駆動部もしくは昇降駆動部を制御する。
(もっと読む)
1 - 20 / 34
[ Back to top ]