
Fターム[3F022NN50]の内容
Fターム[3F022NN50]に分類される特許
1 - 20 / 28
移動体システム
【課題】移動体システムにおいて、移動体の干渉を移動開始前に判断するときの演算量を減らす。
【解決手段】自動倉庫1において、第1移載部32A及び第2移載部32Bは、平面内を移動可能に配置されている。メインコントローラ53は、第1移載部32Aが移動を開始する前に、第1移載部32Aの移動予定経路における干渉を確認する。メインコントローラ53は、ステップ分割部74と、ステップ算出部75と、干渉判断部76とを有している。ステップ分割部74は、移動予定経路における時間又は距離を複数のステップに分割する。ステップ算出部75は、両移載部の相互距離、移動向き、速度を考慮することで、干渉が生じる可能性がないステップを算出する。干渉判断部76は、第1移載部32A及び第2移載部32Bの位置計算をすることで干渉の有無を判断するものであり、干渉が生じる可能性がないステップについての両移載部の位置計算を省略する。
(もっと読む)
物品搬送装置

【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
荷搬送システムの荷搬送方法
【課題】複数の荷搬送台車が同一軌道を走行する場合であっても、専用の中継棚を設置することなく荷の搬送効率に優れた荷搬送システムの荷搬送方法の提供にある。
【解決手段】同一の軌道を走行する複数の荷搬送台車と、軌道に沿って配設された複数の荷保管棚と、荷搬送台車による荷の搬送を制御する制御手段とを備えた荷搬送システムの荷搬送方法である。搬送元Aから搬送先Bへの荷搬送要求が生じたとき、複数の荷搬送台車のうち搬送元Aへ移動可能な第1荷搬送台車を検索し、第1荷搬送台車の搬送先Bへの移動が可能か否かを判別し、第1荷搬送台車の搬送先Bへの移動が不可のとき、搬送先Bへの移動が可能な第2荷搬送台車を検索し、第1荷搬送台車、第2荷搬送台車が共に移動可能な共通移動区間Xの有無を判別し、共通移動区間Xが存在するとき、共通移動区間Xにおける空きの荷保管棚を介して第1荷搬送台車、第2荷搬送台車による荷受け渡しを行う。
(もっと読む)
移動体と搬送システム及び搬送方法
【課題】簡単な処理で、2次元あるいは3次元のスペースを移動する移動体間の干渉を防止する。
【解決手段】2次元方向に移動自在な搬送用の移動体2を複数設け、移動体2が移動する予定の軌跡を移動体2毎に算出する軌跡算出手段16と、他の移動体2が移動する予定の軌跡を把握する軌跡把握手段と、移動体2間の軌跡の重なりの有無を、軌跡が重なる箇所の通過時刻を無視して判定するための判定手段と、軌跡が重なると判定した際に、軌跡が重なる箇所を迂回するように迂回路を算出するための迂回路算出手段16、とを備える。
(もっと読む)
物品収納設備
【課題】結果的に非効率となる回避作動をできるだけ行わずに、一対のスタッカークレーンの相互干渉を回避することができる物品収納設備の提供。
【解決手段】制御手段が、担当スタッカークレーンの物品搬送作動を制御する間は、一対の走行位置検出手段の検出情報に基づいて、一対のスタッカークレーンの一対の走行台車の夫々の走行位置を管理して、一対のスタッカークレーンが干渉することが予測される相互接近位置であるか否かを設定周期毎に判別し、一対の走行台車の夫々の走行位置が相互接近位置である場合は、一対の走行位置検出手段及び一対の昇降位置検出手段の検出情報に基づいて、一対の走行台車及び一対の昇降体を、一対のスタッカークレーンが干渉しない非干渉位置に位置させるべく、一対のスタッカークレーンの作動を制御する干渉回避処理を行なう。
(もっと読む)
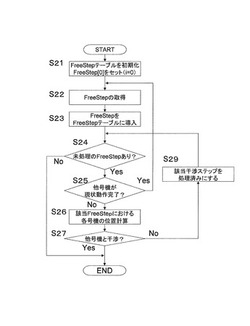
搬送システムの復旧方法
【課題】搬送停止場所の近くから現況確認の結果とその後の運転の方法を指示することにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができる搬送システムの復旧方法を提供すること。
【解決手段】複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、装置の現況確認とその後の運転方法を入力する。
(もっと読む)
物品収納設備及びレールの支持構造
【課題】走行経路に複数のスタッカークレーンを設け、例えば、2階建て構造の物品収納設備にあっても、現場での建設作業を簡易且つ迅速に行うことが可能な物品収納設備を提供する。
【解決手段】上下方向で重なって、スタッカークレーン3a,3bの走行経路2が設けられ、対向して設置される物品収納棚1をそれぞれ構成し、走行経路2側に対向して立設される前側支柱5に関し、棚横幅方向に間隔を隔てて立設される一対の前側支柱5により支持される中間支持ユニット50を備え、一対の前側支柱5に対応する棚横幅方向のレール7,8を、中間支持ユニット50で支持する。
(もっと読む)
物品搬送装置
【課題】上部レールからの反力を昇降用マストの上端側部分へ効率よく伝達できるようにし、それによって装置の簡素化を図ることのできる物品搬送装置。
【解決手段】互いに平行な下部レールと上部レール6を備え、それら下部レールと上部レール6に沿って移動自在なスタッカークレーンが、下部レールに沿って移動自在な走行台車と、その走行台車上に立設された昇降用マスト8と、その昇降用マスト8に沿って昇降自在な昇降台を備え、上部レール6の左右両側面に案内される複数の被案内体11を支持する支持枠12が、昇降用マスト8に取り付けられている物品搬送装置で、昇降用マスト8が、その上端を上部レール6の下端よりも高くまたは一致するように構成され、支持枠12が、昇降用マスト8の上端側部分に取り付けられている。
(もっと読む)
自動倉庫管理装置
【課題】入出庫の作業効率を落とさずに、安価で、スペースを取らず、故障要因の少ない自動倉庫管理装置を提供することを目的とする。
【解決手段】本発明の自動倉庫管理装置は、複数列、複数段の棚を備えたラックと、荷役車両と上記スタッカクレーンとの間で物品の受け渡しを行う入出庫台とから構成される倉庫ユニットを複数基備えた自動倉庫の上記各棚への物品の入出庫を管理する自動倉庫管理装置において、上記入出庫台に置かれた物品を受け取る状態となるまでに上記荷役車両が要する準備時間を算出する算出手段と、上記荷役車両の準備時間に基づいて、物品を出庫する上記スタッカクレーンの入出庫台を移動先とする荷役車両を決定する決定手段を備える。
(もっと読む)
走行システム
【課題】高い搬送能力を確保しつつ搬送システムの規模を抑制する。
【解決手段】天井付近に主軌道2aを水平に敷設すると共に、主軌道2aの下方に副軌道2bを水平に敷設する。主軌道2aから副軌道2bまでを結ぶ分岐軌道6と、副軌道2bから主軌道2aまでを結ぶ分岐軌道7とを設ける。搬送台車3は、主軌道2aを通って物品を搬送すると共に、主軌道2aにおいて渋滞等が生じた場合には、副軌道2bを通って渋滞を回避しつつ物品を搬送することができる。
(もっと読む)
走行車システム
【課題】簡素な構成で、かつ高精度な同期制御が可能な、第1走行車および第2走行車が同一の経路を走行する走行車システムを提供する。
【解決手段】走行車システムの一例として、自動倉庫におけるクレーンシステムが開示される。第1走行車であるクレーン10および第2走行車であるクレーン20は、同一の経路であるレールを走行する。クレーン10およびクレーン20のそれぞれに、走行装置11および走行装置21が設けられ、クレーン10に、走行装置11および走行装置21を制御する制御装置30が設けられている。
(もっと読む)
昇降式の物品搬送設備
【課題】一対の昇降体を非同期状態及び同期状態のいずれでも昇降させることができ、かつ、同期して昇降させる場合には、一対の昇降体の相対昇降位置を精度よく一定に維持させた状態で各昇降体を昇降させることができる昇降式の物品搬送設備を提供すること。
【解決手段】第1昇降体4aと第2昇降体4bとを同期状態で昇降させる同期運転状態の場合には、それら昇降体のうちの一方に対する目標駆動状態を第1昇降位置検出手段21a及び第2昇降位置検出手段21bのうちのそれに対応する昇降位置検出手段の情報に基づいて求めて、その求めた目標駆動状態を共通の目標駆動状態として、第1インバータ28a及び第2インバータ28bに指令するように構成されている昇降式の物品搬送設備を構成した。
(もっと読む)
搬送装置の衝突防止制御装置と方法
【課題】同一の走行レール上で往復動する搬送装置において、他機の移動前にその目的位置、移動方向、移動距離を高速かつ高い信頼性で検知でき、これに基づき、無駄な減速、停止、待機等を発生させずにリアルタイムで自機を制御でき、かつ他機に異常が生じた場合、他機を制御でき、これにより安全装置の多重化が可能となる搬送装置の衝突防止制御装置と方法を提供する。
【解決手段】同一の直線軌道3上を往復動する自機1及び他機2の搬送装置にそれぞれ搭載される搬送装置の衝突防止制御装置。この衝突防止制御装置は、自機と他機の離隔距離Aを非接触かつリアルタイムに直接検出する距離センサ12(レーザ距離計)と、自機と他機の目的位置、移動方向、移動距離を排他的かつリアルタイムに相互通信する相互通信装置14(パラレル光伝送装置)と、自機と他機の離隔距離と自機と他機の目的位置、移動方向、移動距離から、自機と他機の衝突を防止するように自機と他機を制御する走行制御装置16とを備える。
(もっと読む)
物品搬送設備
【課題】構成の簡素化を図りながら、物品搬送車どうしの衝突を防止し、且つ、物品搬送車を目標走行位置に走行させることができる物品搬送設備の提供。
【解決手段】制御手段が、軌道Kに沿って形成させる走行経路2をその長手方向の途中部分における特定区間Rとそれ以外の通常区間Lとに区分けして、通常区間Lにおいては複数台の物品搬送車3夫々の走行位置を走行位置検出手段15の検出情報に基づいて管理して、複数台の物品搬送車3についての走行開始及び停止を制御する形態で、且つ、特定区間Lにおいては物品搬送車3の通常区間Lから特定区間Rへの侵入及び特定区間Rから通常区間Lへの退出を管理して、一台の物品搬送車3を侵入させて連続して走行させるように制御する形態で、複数台の物品搬送車3の走行を制御するように構成されている。
(もっと読む)
スタッカークレーンおよび物品収納設備
【課題】軌道に沿って往復移動するように2台設けたとしても搬送作業を効率よく行うことができるスタッカークレーン、及び、そのスタッカークレーンを備えた物品収納設備を提供する。
【解決手段】スタッカークレーン4を、物品収納棚に備えた複数の収納部に対して物品を出し入れする移載装置12を備えた昇降台11と、この昇降台11を駆動昇降自在に支持する駆動昇降支持手段13を備えた走行台車10とを備え、前記昇降台11に、前記走行台車10の走行方向に並ぶ2台の前記走行台車10の夫々が備える前記駆動昇降支持手段13に対して各別に連結解除可能に連結される被連結部31を一対備えて構成する。
(もっと読む)
無人搬送車の牽引装置
【課題】AGV3がその牽引している台車4の連結構成を自ら検出できるようにする。
【解決手段】AGV3は台車連結構成検出用のコード「CON」を含む電文を台車4に送信し、各台車4は、上記電文を受信したとき、これに自車の台車識別コードを付加し、転送すべき後続台車があるときは当該通信データをその後続台車に転送する一方、当該通信データをAGV宛に返信するようにする。これにより、AGV3は、先頭台車からは1つの台車識別コードが付いた返信データを受信し、n番目の台車からはn個の台車識別コードが付いた返信データを受信することになる。従って、AGV3はそれら返信データを解析することにより、台車連結構成を解析することができる。
(もっと読む)
無人搬送車の運行制御方法
【課題】先行する無人搬送車の無駄な動き(空台車の追い出し)を極力少なくし、次から次へと発生する搬送要求を効率よく処理する無人搬送車の運行制御を提供すること。
【解決手段】床または天井に敷設された循環軌道に沿って走行可能な複数の無人搬送車が配備された無人搬送車の運行制御方法において、前記複数の無人搬送車が後方及び前方にそれぞれ反射型センサ及び反射板を備えており、後続の無人搬送車が先行する無人搬送車に近づくと前記先行する無人搬送車の前記反射型センサが反応し、その時になって初めて前記先行する無人搬送車が前記後続の無人搬送車の走行の邪魔にならないように、前記先行する無人搬送車の追い出し制御を行うことを特徴とした無人搬送車の運行制御方法
(もっと読む)
搬送台車システム
【構成】 後行の天井走行車8はレーザ距離計で先行の天井走行車6との距離を測定し、この距離の変化から相対速度を求める。後行の天井走行車8は、車間距離が徐行距離以上であることを条件に、先行の天井走行車6と同速で追従走行するように、自機の速度を制御する。
【効果】 単位時間当たりの天井走行車のスループットが増し、搬送効率が改善する。
(もっと読む)
自動搬送システム
【課題】低コストの生産が可能な生産ラインの自動搬送システムを提供する。
【解決手段】複数の生産工程を経て生産されるワークを次工程に搬送する自動搬送システムにおいて、次工程がワークを受入可能か否かを判別する判別手段を備え、受入可能な場合に現工程から次工程にワークを搬送するとともに、受入できない場合に判別手段により次工程の受入可能時刻と現工程の次ワークの処理開始時刻とを比較し、次工程の受入可能時刻が早いときに現工程でワークを待機させる。
(もっと読む)
物品収納設備
【課題】搬送能力の向上を効果的に実現できる物品収納設備の提供。
【解決手段】制御手段が、異なる収納部1を収納対象として複数の物品の入庫が指令された場合には、複数の物品搬送用移動体4の夫々に備えさせた複数の物品移載手段12を入出庫用の物品支持部に対応する入出庫側の物品移載位置に位置させて、複数の物品移載手段12にて入出庫用の物品支持部から物品を受け取る受け取り用の移載を行い、次に、複数の物品搬送用移動体4の夫々に備えさせた複数の物品移載手段12を受け取った物品を収納すべき収納部1に対応する棚側の物品移載位置に位置させて、受け取った物品を収納部1に収納するように移載すべく、複数の物品搬送用移動体4の水平移動、複数の物品移載手段12の昇降作動、および、複数の物品移載手段12の移載作動を制御する同時入庫処理を実行するように構成されている。
(もっと読む)
1 - 20 / 28
[ Back to top ]