
Fターム[3F072GD06]の内容
特殊移送 (6,503) | 収納 (291) | 積み重ね、積み降ろし (54) | パレット(台板)を含むもの (10)
Fターム[3F072GD06]に分類される特許
1 - 10 / 10
ピックアップ装置
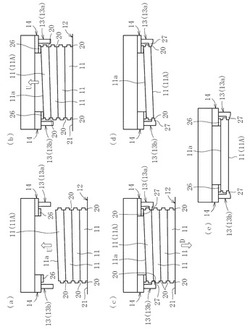
【課題】上下方向に複数枚のトレイが積み上げてのその積層体が傾いても、最上段のトレイを安定して順次ピックアップしていくことができるピックアップ装置を提供する。
【解決手段】上下方向に積み重ねられた複数のトレイ11に対して、その最上段トレイ11Aをピックアップするピックアップ装置である。上下方向に積み重ねられた複数トレイ11が載置される昇降台12と、昇降台12の上昇によって上昇してきた最上段トレイ11Aを保持する複数のトレイ保持機構13と、水平面に対する最上段トレイ11Aの傾斜に対応して各保持機構位置を上下方向に変位させる倣い機構14とを備える。
(もっと読む)
ワーク取り出し方法

【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
プリント基板供給装置
【課題】 プリント基板供給装置の装置本体への基板のセット作業や搬送作業を極めて簡単かつ敏速に行えるようにする。
【解決手段】 同一の寸法、形状を有する多数の基板を互いに重ね合わせてなる基板束4を縦置きすることができる基板セット部Sを装置本体内2に設けるとともに、複数個の無接触吸着パッド8を突設したL字形作動アーム7を所定の角範囲に亘って往復回動可能に設け、該作動アームと共に往復回動するそれらのパッドで基板束から基板を1枚づつ吸着分離して搬出面上へ搬送するようにする。
(もっと読む)
物品搬送装置
【課題】省スペースでランニングコストを低く抑えられ、高速で立体的な三次元搬送ができ、長ストロークを上下動できる物品搬送装置を提供する。
【解決手段】物品搬送装置の架台4にラック・ピニオン機構により前進又は後退する前後動部材50の基端部を固定し、前後動部材の先端部には、機械40との間でワークWを授受する上下動ローダを有する上下動部材60(Y)をスライドガイドを介して接続し、上下動部材は前後動部材を介して任意距離移動され、前工程の出口2の未加工のワークをキャリヤー10で上下動ローダの対向位置まで搬送し、キャリヤーと上下動ローダのチャックとのワーク受け渡し位置から上下動ローダを降下して、機械との間でワークを受け渡し、加工済みワークを上下動ローダにより上昇してキャリヤーに受け渡してから後工程の入口3へ搬送する。
(もっと読む)
容器群積付け装置及び積付け方法
【課題】簡易な装置構成で多様な形状、素材、剛性及び重量の容器を損傷させずに、又、多様な配列の容器群の寸法差異や整列状態の乱れ、あるいは容器の欠落に影響を受けないでパレット上に容器群を安定して段積みできる積付け装置及び方法を提供する。
【解決手段】容器群積付け装置1は、幅広い種類の容器に対応可能な吸引ヘッド2、その移動手段及び負圧供給手段4を具備する保持搬送装置10を備えており、保持搬送装置10の吸引ヘッド2を移動手段で移動させて一連の段積み操作を行う。即ち多列ステージ22に整列された容器群を吸引ヘッド2で吸引保持した後、セパレートシート供給装置23で供給されたセパレートシート上に移動する。そこで、吸引ヘッド2に吸引保持された容器群の下側にセパレートシートを更に吸引保持した後、パレット20上に搬送し、両者を一体でパレット20に積む。この操作を繰り返して段積みを完了する。
(もっと読む)
サブパレット移載装置
【課題】基準パレット内からサブパレットを簡単に取り出すことができ、また取り出したサブパレットを確実に基準パレット上に移載することができるサブパレット移載装置を提供する。
【解決手段】シリンダユニットを駆動することで、操作爪片107を前進させ基準パレット10に設けたストッパ18をスプリングに抗して水平状態にし、サブパレット20を引き出し可能な状態にする。また予め昇降部材110を最下限位置にし、シリンダユニット123を駆動し、ロッドを前進せしめ、ロッド先端の係合片をサブパレット20のT字溝に進入させ、次いでモータ(駆動部材)によってロッドを90°回動せしめることで係合片をT字溝に係合させ、次いでシリンダユニット123を逆方向に駆動し、収納空間Sからサブパレット20をサブパレット受渡しユニット130上に引き出す。
(もっと読む)
ワーク取り出し方法及びワーク取り出し装置
【課題】各パレット間でその高さ及び幅に寸法誤差があってもパレットからワーク取り出し装置でワークを取り出す作業を自動化する。
【解決手段】第1のパレット4の支柱8に形成されたカム溝に軸をスライド自在に係合させて略水平状態となる第1の状態とガラス3を取り出せる跳ね上げ状態となる第2の状態との間で開閉自在とされる仕切板9を複数有し、略水平状態となる第1の状態にある各仕切板9の上にガラス3を平置きして該仕切板9と該ガラス3とを交互に段積みしてなるパレット4からガラス3を取り出すワーク取り出し装置。このワーク取り出し装置7では、第1の状態にある仕切板9の下に入り込んでこの仕切板9を跳ね上げ、該仕切板9を前記ガラス3が取り出せる状態となる第2の状態とする跳ね上げ部材と、仕切板9が跳ね上げられることにより取り出し可能とされたガラス3を保持する吸着保持機構部と、を備える。
(もっと読む)
物品移載装置及び物品移載システム、物品移載方法
【課題】 レトルトパウチ、輸液バッグのような物品を熱処理する設備システムを簡略にし、設置スペースを縮小し、熱処理品質を向上させる物品移載装置、物品移載システム、物品移載方法を提供する。
【解決手段】 上下多段にトレイ20を定ストロークで出し入れ可能に収納したトレイ引出式の熱処理用筐体30と、筐体30から引き出されるトレイ20に対して熱処理済みの物品3bをトレイ20から搬出するアンローディングと、筐体30に入れ戻されるトレイ20に対して未熱処理の物品3aをローディングする、両機能を備えた物品移載装置F1を筐体30のトレイ出し入れ側に併設する。
(もっと読む)
ハンドリング装置
【課題】異なる部品を扱う上での柔軟性のレベルが高いハンドリング装置を提供する。
【解決手段】ハンドリング装置11は、キャリアユニット12を備える。キャリアユニット12は、ロボットアームに連結するための連結部13と、複数の作動モジュール14と、を備える。複数の作動モジュール14のそれぞれは、作動装置18を取り付けるための少なくとも1つの取付インターフェース17を備える。作動モジュールのそれぞれには、取付インターフェースの位置を設定するための調整手段が設けられる。調整手段は、制御装置からの電気的な制御信号によって制御される、複数の位置設定駆動部19、20,21を備える。複数の位置設定駆動部19、20、21は、x,y,z座標系を有するデカルト座標系におけるx方向、y方向およびz方向に取付インターフェースを移動できる。
(もっと読む)
ワーク移し替え方法、ワーク移し替えシステム及びワーク移し替え装置
【課題】視覚センサーなどを使用することなくガラスを機械的手段によって精度良く位置決めしてパレットから別のパレットへ移し替えることのできる低設備で且つメンテナンスも容易に行えるガラス移し替え装置を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレットから所定のガラス3を取り出した後、組み立て生産順番となるように第2のパレットに移し替えて順次配列させる作業を繰り返し行うガラス移し替え装置。この装置では、ガラス3を吸着保持する吸着保持機構部27とガラスの奥行き方向のガラス保持位置をハンドリングロボット2の基準位置に合致させる位置調整機構部28とを備えた吸着保持位置調整手段21と、手首部分とハンドフレームとの間に設けられ、吸着保持位置調整手段で保持したガラスの幅方向及び縦方向のガラス保持位置を、ハンドリングロボット2の基準位置に合致させるガラス保持位置調整手段23とを備える。
(もっと読む)
1 - 10 / 10
[ Back to top ]