
Fターム[3F077EA02]の内容
船舶の荷積み、荷おろし (441) | 荷役装置の制御;検出、及び荷役方法 (101) | 荷おろし制御 (15)
Fターム[3F077EA02]に分類される特許
1 - 15 / 15
グラブバケット式アンローダのバラ物陸揚げ方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
起重機
【課題】ばら物を荷役する起重機において、ばら物の荷役効率を向上させる。
【解決手段】ばら物4を陸揚げするアンローディングクレーン1において、ばら物4をばら積み船3から掴持して吊り上げる開閉式のグラブバケット6と、そのグラブバケット6からばら物を受け取り、ホッパまで横行搬送するトラバーサ7とを備えた。このトラバーサ7の下部に、ばら物4をグラブバケット6から受け取り、ホッパ8の投入口に対して斜めに投入するバケット部7bを設けた。
(もっと読む)
荷役搬送システム及び荷役搬送方法
【課題】荷役効率が低下することを抑えつつ、設置及び運用に要するコストを下げることができる荷役搬送システムを提供すること
【解決手段】船舶10にバラ積みされたワークWを船舶10から積み降ろす積み下ろし部30と、積み下ろし部30により船舶10から積み下ろされたワークWが内部に収容されるコンテナ70と、少なくとも一つのコンテナ70を載置可能な空きスペースを設けて容器70を複数集積する集積部50と、積み下ろし部30から集積部50まで容器100を搬送する集積車両60と、集積車両60で搬送されたコンテナ70を集積部50に載置するヤードクレーン55と、集積部50から消費先100へワークWが収容されたコンテナ70を搬送する搬出車両80と、ワークWが収容されていないコンテナ70を積み下ろし部30まで搬送する集積車両60とを備える。
(もっと読む)
自動車運搬船における車両管理装置
【課題】背打ち防止警報機能と、車両カウント機能と、速度制御警報機能という3つの機能を簡単な構成でもって発揮させる。
【解決手段】車両の通過を検出する第1〜第3のセンサー11〜13を、ランプウェイまたは船内車両通路に対し入庫方向に沿って間隔を存して順に設置する。第2のセンサー12は、第1および第3のセンサー11,13よりも高い位置に設置される。制御ユニット16は、第1〜第3のセンサー11〜13よりの信号を受け背打ち防止警報機能、カウント機能および速度制限警報機能を発揮する。
(もっと読む)
乾燥ばら積み貨物船を準備する方法
砂の輸送及び流動体化した積み降ろしのために乾燥ばら積み貨物船(1)を準備する方法であって、多目的船倉(4)の内部に、流入開口(12)を有する流動体化パイプ(10)及びまた流動体化した砂のためのスラリー流入口(34)を配置するステップを含んでおり、この方法はさらに、スラリー流入口(34)と積み降ろしパイプ(40)との間に接続されたスラリーポンプ(38)を配置するステップをさらに含み、スラリーポンプが多目的船倉(4)に隣接した船倉(2)に置かれている。  (もっと読む)
(もっと読む)
リーファーコンテナの荷役方法、及びその荷役制御システム
【課題】電源ケーブルの連結を解除する解放作業を行う作業員と、荷役作業を行うクレーンオペレータが有する情報を共有化し、リーファーコンテナの電源ケーブルの切断事故を防止し、荷役作業の安全性の高いリーファーコンテナの荷役方法を提供する。
【解決手段】コンテナターミナル1で荷役するリーファーコンテナ5Rの荷役方法において、リーファーコンテナ5Rの電源ケーブル6の接続の状態を、リーファーコンテナの管理システム10で収集する接続情報収集ステップと、接続情報をコンテナターミナル制御システム4に送信するデータ蓄積ステップと、リーファーコンテナ5Rの荷役を行う岸壁クレーン3又は門型クレーン25が、コンテナターミナル制御システム4から接続情報を車載端末14で受信する受信ステップと、接続情報を基に、岸壁クレーン3又は門型クレーン25で、リーファーコンテナ5Rを荷役する荷役作業ステップを有する。
(もっと読む)
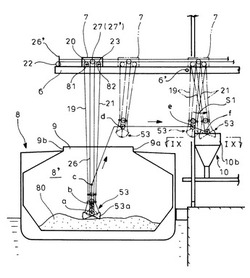
低所にある船倉のための荷下ろし装置
【課題】船倉の貨物を陸上へ大量かつ効率的に搬送できる荷下ろし装置を提供する。
【解決手段】荷下ろし装置は、船倉10,10’から貨物が供給される供給室30と、鉛直コンベア31と押出し管51をもつ圧力容器33を有するリフト装置を備える。鉛直コンベア31は、供給室30から始まって圧力容器33の上部で終わる。押出し管51は、圧力容器33の下部から始まって圧力容器33を貫通する。荷下ろし装置は、圧力容器に圧力を加え、搬送空気ノズル53を作動させる圧縮装置6および制御装置8を備える。圧力容器内の鉛直コンベア31と押出し管51の重ね合わせた配置により、鉛直コンベア31は、ばら荷を受ける空間を形成し、ばら荷は圧縮装置6により流動化して、押出し管51を使って運び出される。船の荷下ろしを、外部または陸側の支援なしで迅速に行う。
(もっと読む)
岸壁クレーンの運転方法、及びその運転制御システム
【課題】コンテナ船内のコンテナの解放作業を行う作業員と、荷役作業を行うクレーンオペレータを有する情報を共有化し、安全性が高く、且つ、荷役効率の高い岸壁クレーンの運転方法、及びその運転制御システムを提供する。
【解決手段】海上輸送用のコンテナ5を、コンテナ船2から陸上に荷揚げする岸壁クレーン3の運転方法において、コンテナ船上のコンテナ5の固縛装置8を解除する解放作業ステップと、固縛装置8を解除したコンテナ5の情報を無線通信端末10に入力する入力ステップと、情報を無線でコンテナターミナル制御システム4に送信するデータ蓄積ステップと、コンテナ5の荷役を行う岸壁クレーン3が、コンテナターミナル制御システム4から情報を車載端末14で受信する受信ステップと、情報を基に、岸壁クレーン3でコンテナ5を荷役する荷役作業ステップを有する。
(もっと読む)
陸揚げコンベアの搬出位置調整システム
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】陸揚げコンベア3がシャトルコンベアであって、その陸揚げコンベヤ3の搬出端31に備えた搬入ホッパ6との間の距離を測定するための伸縮方向位置センサー8と、この伸縮方向位置センサー8からの測定信号により陸揚げコンベア3の伸縮機構33を制御して陸揚げコンベアを伸縮させる制御装置9とからなる陸揚げコンベア伸縮装置10を備えた。
(もっと読む)
ブームコンベアの搬出位置調整手段
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】ブームコンベア7の搬入端71に備えられた搬入ホッパ6との距離を測定するための横方向位置センサー8a,8bと、横方向位置センサー8a,8bからの測定信号により旋回機構9を制御する制御装置10とからなり、陸揚げ作業時において船体が移動して陸揚げコンベア7の排出端71が搬入ホッパ6の中央位置からずれたとき、制御装置10が記横方向位置サンサー8a,8bから送信される測定信号に基づいて旋回機構9を所定の方向へ所定角度だけ駆動させることにより陸揚げコンベア7を旋回させてその排出端71を元の位置に復帰させる。
(もっと読む)
陸揚げコンベアの搬出位置調整手段
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】陸揚げコンベア3の搬出端31に伸縮機構131により伸縮する伸縮シュート13が付設されているとともに陸揚げコンベア3の搬出端31と搬入ホッパ6との間の距離を測定するための高さ位置センサー7と、高さ位置センサー7からの測定信号により伸縮機構131を制御して伸縮シュート13を伸縮させる制御装置10とからなる。
(もっと読む)
ばら物運搬船の陸揚げ時における船体の位置調整システム
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】運搬するばら物を陸揚げする埠頭4に所定の間隔を隔てて配置された一対の繋留柱41,42に繋ぐ繋留ロープ71、81とこの繋留ロープ71,81を巻き上げ及び繰り出し可能に且つ所定の繰り出し位置において固定可能に装備する船首及び船尾においてそれぞれ配置される巻取機72,82からなる繋留装置7、8と、船体2に配置されて船体2の埠頭4に対する前後方向位置を測定するための位置センサー9と、位置センサー9からの測定信号により前記各巻き取り機72,82を制御して繋留装置7、8の繋留ロープ71、81を繰り出し又は巻き取る伸縮させる制御装置10とからなる。
(もっと読む)
炭化水素のオフショア移送のための多機能ユニット
本発明は、積出しの形態で配置された、オフショアユニット(1)と運搬船(2)との間の流体の移送のための炭化水素移送構成体であって、少なくとも1つの移送ホース(3)と、1つのガスリターンホース(4)とを具備し、少なくとも1つの移送ホースの端部は、プロセス船舶と運搬船との間の移送ホースの運搬を果す浮遊式多機能ユニット(6)に接続され、浮遊式多機能ユニットは、水から持ち上げられ、水位よりも上の固定位置に保持されることができ、また、浮遊式多機能ユニットには、移送ホースの端部と運搬船のミドシップマニホルドとの間の流体接続を形成するための接続手段(7)と、この接続手段から所定の距離に配置された、少なくとも1つの移送ホースのための緊急分離手段(13)とが設けられている、炭化水素移送構成体に関する。 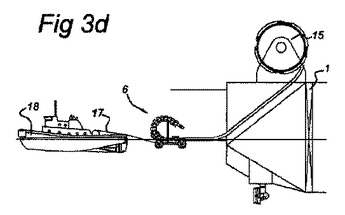 (もっと読む)
(もっと読む)
リクレーマの払出制御方法およびその自動払出制御装置
【課題】貯鉱場において積付山間にデッドスペースを設けなくてもリクレーマで自動的に払出せるようにして、貯鉱効率を良好なものとする。
【解決手段】走行駆動手段により積付山の長さ方向に沿って往復走行可能な本体20と、旋回駆動手段および俯仰駆動手段により旋回および俯仰可能なブーム21と、その先端に設けられ回転駆動手段で回転して貯蔵物を掬い取るバケットホイル21aとを備えたリクレーマ2を、自動払出制御装置で運転制御する払出制御方法において、自動払出制御装置が走行位置、旋回角度位置・俯仰角度位置、バケットホイル駆動電流値をそれぞれ検知するものとし、積付山3aの長さ方向の中間部に側方からバケットホイル21aを着地して払出しを開始し、これら各出力信号によるデータを基にバケットホイル21aの動作を決定して各駆動手段を運転制御して中間部から貯蔵物を自動的に払出すようにした。
(もっと読む)
1 - 15 / 15
[ Back to top ]