
Fターム[3F204DA10]の内容
クレーンの細部(制御、安全) (2,955) | 被搬送物と荷役場所 (198) | 荷役場所 (91) | 船倉 (12)
Fターム[3F204DA10]に分類される特許
1 - 12 / 12
荷役時間を短縮する港湾荷役機器の制御方法と港湾荷役機器
【課題】消費電力する電力量を変えずに、荷役時間を短縮する港湾荷役機器の制御方法と港湾荷役機器を提供する。
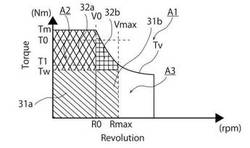
【解決手段】コンテナを、コンテナの巻上げ下げ開始から基準速度V0まで、コンテナの荷重に係わらず、定トルク領域A2の最大トルクである第1最大トルクTmによる一定の第1加速度で巻上げ下げし、基準速度V0から荷重から算出される最大速度Vmaxまで、定出力領域A2で定められる速度に反比例する最大トルクである第2最大トルクTvと保持用トルクTwとの差分である第2トルクを、予め定めた一定時間毎に算出し、算出した第2トルクにより一定時間毎に可変する第2加速度で巻上げ下げするようにクレーンのモータを制御する。
(もっと読む)
グラブバケット式アンローダのバラ物陸揚げ方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
クレーン制御装置
【課題】荷役作業効率の低下を最小限にとどめながら、クレーンの消費電力合計値を低減して省エネルギー効果及び経済性を高め、発電設備の容量低減を可能にする。
【解決手段】荷役用の各クレーンCから送られた運転動作指示を検出する運転動作指示検出手段1と、運転動作指示に応じた各クレーンCの動作に伴って発生する消費電力合計値を算出し、この消費電力合計値と発電設備の容量から設定される運転動作指示保持基準値とを比較して運転動作指示の保持要否を判断する運転動作指示保持判断手段2と、保持必要と判断された運転動作指示を一定時間保持する運転動作指示保持手段3と、保持不要と判断された運転動作指示及び一定時間保持された後の運転動作指示を、各クレーンCに送出する運転動作指示送出手段4と、運転動作指示が一定時間保持されていることを運転員に通知する運転動作指示保持通知手段5と、を備える。
(もっと読む)
デッキクレーン
【課題】ジブ俯仰用ウィンチやフック巻上用ウィンチからの戻り圧油エネルギーを回収し、回収されたエネルギーを再利用して、省エネルギー化を図ること。
【解決手段】積荷を上昇および下降させるワイヤ11が巻回されたウィンチ28と、ワイヤ11を巻上げる際には、ウィンチ28を回転させる油圧モータとして作動し、ワイヤ11を巻下げる際には、自重によって降下する積荷が引き出すワイヤ11によって回転させられるウィンチ28の回転力を駆動源として回転するポンプとして作動する油圧ポンプ・モータ27と、ワイヤ11を巻上げる際に、油圧ポンプ・モータ27に昇圧されたオイルを供給する油圧ポンプ22と、ワイヤ11を巻下げる際に油圧ポンプ・モータ27にて昇圧されたオイルを一時的に貯留しておくアキュムレータ30とを備え、ワイヤ11を巻上げる際に、アキュムレータ30に貯留されたオイルが、油圧ポンプ22に供給されるように構成されている。
(もっと読む)
デッキクレーンの制御用油圧回路
【課題】 専用の制御用ポンプを用いることなく電磁比例減圧弁を制御できるようにする。
【解決手段】 ポンプユニット51に組み込まれている巻上下用ポンプ53の補助用としての動力用ポンプ55の吐出側に圧油供給ライン64を接続する。この圧油供給ライン64の途中に、電磁比例減圧弁56の制御用回路58を分岐させて設ける。制御用回路58に減圧弁65を設ける。上記圧油供給ライン64の上記制御用回路58の分岐点よりも下流側位置に、シーケンス弁66を設ける。
(もっと読む)
位置ずれ量算出方法およびクレーン並びに搬送台車
【課題】クレーンの吊具と搬送台車との相対的な位置関係を把握し、安定した信頼性の高い荷役作業を行うこと。
【解決手段】本体2からワイヤ14によって吊り下げられた吊具15によりコンテナ50を把持して移動させることにより荷役作業を行うクレーン1と、クレーン1との間でコンテナ50の受け渡しを行う搬送台車との相対的な位置ずれ量を算出する位置ずれ量算出方法であって、搬送台車の特定の位置に設けられた目印をクレーン1の吊具15に取り付けられた撮像装置により撮像し、撮像装置により取得された撮影画像上の目印の位置と吊具15における撮像装置の取り付け位置との関係に基づいて、搬送台車と吊具15との相対的な位置ずれ量を算出する。
(もっと読む)
船舶の電力供給システム
【課題】船舶の船内電気設備に効率よく電力を供給する。
【解決手段】船舶に搭載され電気設備200に電力を供給する電力供給システム400であって、電力を発生する発電機142、144と、電力の供給を受けて荷役対象121を上昇させるとともに、荷役対象121を降下させる場合に電力を発生する回生ユニット350を含むデッキクレーン122、124、126、128と、回生ユニット350が発生した電力を蓄積する蓄電器260と、発電機140、蓄電器260、電気設備200および回生ユニット350が共通に結合された母線152とを備え、母線152に基づいて、当該船舶におけるデッキクレーン122、124、126、128以外の電気設備200に電力を供給する。
(もっと読む)
港湾荷役クレーンシステムの制御方法
【課題】キャパシタ蓄電回路に蓄電された電力を積極的に用いてクレーンシステム全体のエネルギー利用効率を高めた港湾荷役クレーンシステムの制御方法を提供する。
【解決手段】本発明の港湾荷役クレーンシステムの制御方法は、少なくともディーゼルエンジン10を動力源とする発電機11と、この発電機11から発生する電力を直流に変換する整流回路12と、整流回路12から発生する直流電力を交流電力に変換するインバータ回路16と、整流回路12とインバータ回路16との間の直流電力を蓄電するキャパシタ蓄電回路14と、インバータ回路16からの出力で駆動される電動機17と、電動機17を動力とするクレーン18と備えるものであり、ディーゼルエンジン10を常時オンとして常時該発電機11によって電力を発生させ、キャパシタ蓄電回路14に蓄電された電力を補助的に用いる荷揚げモードと、ディーゼルエンジン10を適宜オンとして必要に応じて発電機11によって電力を発生させ、キャパシタ蓄電回路14に蓄電された電力を主として用いる荷下ろしモードとを有する。
(もっと読む)
荷役用クレーンの制御装置
【課題】コンテナ等の荷役作業における巻上げ量とスプレッダ等の支持手段の方向とを適切に制御することにより、荷役効率を大幅に向上させることができる荷役用クレーンの制御装置を得る。
【解決手段】船に設置された複数の船体用GPSアンテナ22a及び22bと、船と陸との間で荷物を積み降ろすクレーン5に設けられたクレーン用GPSアンテナ14と、クレーン5に設けられ、荷物を所定の方向から支持する支持手段と、船体用GPSアンテナ及びクレーン用GPSアンテナ14により検出された各位置データに基づいて、荷物の横行時の障害物高さ及び横行される荷物の下面高さを演算し、複数の船体用GPSアンテナ22a及び22bにより検出された各位置データに基づいて、荷物の傾斜を演算する演算手段21とを備え、演算手段21の演算結果に基づいて、クレーン5の巻上げ量及び支持手段の傾斜を制御する。
(もっと読む)
コンテナクレーンの対象物位置計測装置と該対象物位置計測装置を用いた自動荷役装置
【課題】スプレッダと吊り上げ目標コンテナ、吊り荷コンテナと積載目標物の位置を同時計測し、積み込み積み卸し時の位置決めを正確に行えるようにする。
【解決手段】トロリー8に巻上げロープ10を介して懸吊されたスプレッダ9にて保持されるコンテナ11の長手方向一端よりも外方位置となるように、トロリー8の横行方向と直角方向の一側に、レーザレーダ19を取付部材32を介して取り付ける。トロリー8に懸吊されたスプレッダ9、スプレッダ9に保持した吊り荷コンテナ11と、その下方に位置する、吊り上げ目標コンテナ11、又は、吊り荷コンテナ11の積載目標物を、レーザレーダ19により斜め上方より走査して3次元位置を同時計測し、その3次元位置情報を基に、スプレッダ9下面と吊り上げ目標コンテナ11の上面、又は、吊り荷コンテナ11下面と積載目標物の上面が一致するよう上記巻上げロープ10の長さとトロリー8の横行を制御させる。
(もっと読む)
吊荷の振れ特性算出装置及びその方法
【課題】 技術者の読み取り作業を不要とし、信頼性の高い振れ特性を取得すること。
【解決手段】 吊りロープによりトロリに吊り下げられた吊荷の振れ特性を算出する吊荷の振れ特性算出装置であって、トロリを駆動させるための指令を生成する駆動指令生成部12と、この駆動指令に基づいてトロリを駆動させるための駆動信号を生成する信号出力部13と、駆動信号に基づいてトロリを駆動する駆動装置と、トロリが駆動されることにより振れが生じた吊荷の振れの変位を所定の時間間隔でサンプリングするサンプリング部14と、サンプリングの結果を用いて、吊荷の振れ状態を推定するとともに、推定した吊荷の振れ状態に基づいて、吊荷の振れ特性を算出する振れ特性推定部15とを具備する吊荷の振れ特性算出装置を提供する。
(もっと読む)
1 - 12 / 12
[ Back to top ]