
Fターム[3F204EA17]の内容
クレーンの細部(制御、安全) (2,955) | 振れ止め制御 (100) | 残留振れに対処するもの (17)
Fターム[3F204EA17]に分類される特許
1 - 17 / 17
橋形クレーン
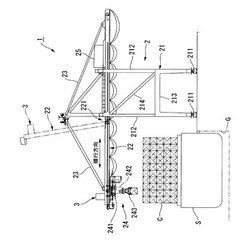
【課題】橋形クレーンのブームを吊り下げ支持するテンションバーが走行方向へ振動することを抑制する手段を提供することにある。
【解決手段】本発明に係る橋形クレーン1は、支持体21と、この支持体21から張り出して設けられた長尺なブーム22と、このブーム22に対して傾斜するようにして、ブーム22の先端部と支持体21とを連結して設けられ、ブーム22を吊り下げ支持するテンションバー23と、このテンションバー23の軸方向引っ張り側への振動を減衰する減衰手段3と、を備えるものである。
(もっと読む)
低揺動洋上荷役システム又はこれを備えた洋上浮遊体

【課題】洋上において荷役機構の上下動に起因した吊荷等の負荷の揺動を抑制しその位置を一定に保つ揺動制御を行うにあたり、より小型で高効率の低揺動洋上荷役システムを新たに提供する。
【解決手段】揺動制御を行うための構成を備えたものにおいて、発電機5からインバータ7に向かう給電ライン11の一部に直流電力を備蓄する蓄電部13を接続して、揺動制御における回生時に電動モータ9から回生エネルギを蓄え、蓄えたエネルを力行時に電動モータ9に供給し得るようにした。
(もっと読む)
クレーンの制御方法
【課題】吊荷のロープの長さを変動する場合における吊荷の残留振動をより効果的に抑制することのできるクレーンの制御方法を提供する。
【解決手段】
加速区間、等角速度区間、減速区間の順で旋回させる運搬過程を有し、当該運搬過程において、前記運搬開始位置から前記目標位置までに要する運搬時間の1/2の時刻で対称(折り返した場合に等しくなる対称関係)となるように座標変換を行うと共に、前記ワイヤの長さの変動および前記吊荷の昇降速度の変化に応じて算出される旋回加速、減速パターンに基づいて、旋回速度の加減速制御を行う。
(もっと読む)
クレーンの制御方法
【課題】吊荷の残留振動をより効果的に抑制することのできるクレーンの制御方法を提供する。
【解決手段】ブームの旋回半径を一定として、加速区間、等角速度区間、減速区間の順で旋回させる運搬過程を有し、当該運搬過程において、運搬開始位置から目標位置までに要する運搬時間の1/2の時刻で線対称(折り返した場合に等しくなる対称関係)となるように座標変換を行った旋回加速、減速パターンに基づいて、旋回速度の加減速制御を行う。
(もっと読む)
クレーンの振れ止め制御方法
【課題】 設定されたパラメータの影響を受けずに高精度の制御が可能なクレーンの振れ止め制御方法を実現する。
【解決手段】 クレーンのトロリーによる吊り荷搬送の加速工程では、あらかじめ設定された吊り荷の固有周期に基づいて同調制御を行うとともに、吊り荷の振れ周期を計測し、等速度搬送工程では、吊り荷の振れ振幅を計測し、振れ振幅に基づいて搬送方向と同じ方向に作用する正方向制御加速度と搬送方向と逆方向に作用する逆方向制御加速度とを設定し、振れ振幅が最大またはゼロとなるときから、正方向制御加速度及び逆方向制御加速度を、振れ周期に基づいてそれぞれ設定される所定の時間で、トロリーにそれぞれ作用させる振れ制御を行い、減速工程では振れ周期に基づいて最短時間制御を行う。
(もっと読む)
振れ角補正装置および振れ角補正方法
【課題】振れ角のオフセット量が外乱などで横行中に変化する場合においても、振れ角フィードバック制御の安定性を維持しつつ、振れ角を校正する。
【解決手段】オフセット検出部4は、吊り荷の振れ周期Tpの期間分だけサンプリング処理部3にてサンプリングされた振れ角検出値θdetを平均化することで、瞬時オフセット値θ0を検出し、平均化処理部5は、オフセット検出部4にて検出された瞬時オフセット値θ0を平均化することで、オフセット補償量θostを算出し、補償処理部7は、平均化処理部5にて算出されたオフセット補償量θostにて振れ角検出値θdetを補償する。
(もっと読む)
レーザーポインタを用いた天井クレーンによる搬送方法及び天井クレーンシステム
【課題】レーザーポインタにより指示された3次元空間における目標搬送位置へ搬送物を搬送する方法及び天井クレーンを提供する。
【解決手段】コントローラを介して自動運転される天井クレーンを用いて搬送物を搬送開始位置から目標搬送位置の真上までの3次元空間における搬送径路に沿って自動的に搬送する方法であって:スポット光を撮像するための複数のカメラを設置し;レーザーポインタによりレーザー光線を目標搬送位置床表面に照射してスポット光を生成し;該生成されたスポット光を少なくとも1台のカメラで撮像し、該撮像データを利用してスポット光重心位置の3次元空間座標を決定し;前記3次元空間座標を前記目標搬送位置データとして利用して前記コントローラによって前記搬送径路を決定し、該搬送径路に沿って前記搬送物を前記搬送開始位置から前記目標搬送位置の真上まで自動的に搬送する;ことを含む自動搬送方法。
(もっと読む)
クレーンの荷振れ止め装置
【課題】吊荷を目標停止位置に位置させたときに吊荷の振れがある場合に目標停止位置付近で制振させるクレーンの荷振れ止め装置を提供する。
【解決手段】クレーンの荷振れ止め装置は、停止判断部で各操作手段の停止を判断した時にブーム起伏角検出手段およびブーム長さ検出手段の各検出手段からの検出信号を受けその時に位置するブーム先端部位置を吊荷目標位置として目標位置設定部で設定し、前記停止判断部からの停止信号と前記各検出手段からの検出信号と前記ロープ長さ検出手段からのロープ長さ信号と前記縦方向振角検出手段からの振れ角信号とを受け、吊荷の前後方向吊荷の振れに対して吊荷の振れ位置にブーム先端部を位置させるよう前後方向に水平移動して制振させるとともに、前記目標位置設定部で設定した吊荷目標位置にブーム先端部を位置させるよう各駆動手段に制御信号を出力する制振制御部を備えた。
(もっと読む)
共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法
【課題】複数のクレーンの動作を制御し複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置において、作業者のミス等により搬送が失敗する虞れなく、動作指令の生成を容易とし操作の効率を向上させ、搬送物の揺れを抑えるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できるようにする。
【解決手段】複数のクレーン1,2のうちの一は、作業者の操作によって動作するリーダクレーン1であり、他のクレーンは、制御装置により制御されて動作するフォロワクレーン2である。制御装置は、フォロワクレーン2における搬送物3の振れ幅に基づいてフォロワクレーン2のリーダクレーン1に対する距離偏差を推定し、推定された距離偏差をなくすようにフォロワクレーン2ヘの動作指令を生成する。この動作指令によりフォロワクレーン2を動作させてリーダクレーン1の動作に追従させる。
(もっと読む)
クレーンのフックブロック振れ角検出装置
【課題】振れ角が大きい場合にも正確に振れ角を検出できるクレーンのフックブロック振れ角検出装置を提供すること。
【解決手段】基台上に旋回駆動及び起伏駆動が可能にブームを配設し、該ブームの先端に配設された先端滑車より垂下したワイヤロープにより荷を吊り上げるクレーンの振れ角を検出するクレーンのフックブロック振れ角検出装置である。先端滑車3に揺動自在に支持された第1ブラケット6と、第1ブラケット6に支持された交差支軸7に揺動自在に支持された交差ブラケット11と、交差ブラケット11に支持された第2滑車13A,13Bと、第2滑車13A,13Bに係合されたワイヤロープ5を受けるフックブロック14と、交差ブラケット11の傾斜角を検出する傾斜角検出手段とを配置したことを特徴とする。
(もっと読む)
吊り荷揺動減衰装置と軌道設定装置とによりクレーン又はバガーで吊り荷ロープに吊り下げられている吊り荷を自動的に積み替える方法
【課題】旋回装置、起伏装置及び巻き上げ装置がついているクレーン又はバガーの吊り荷ロープに吊られている吊り荷を積み替える方法において、クレーン又はバガー特に港湾移動クレーン用のいわゆるティーチイン運転の積み替えを行えるようにする。
【解決手段】軌道設定装置、障害監視装置及び前制御付き状態コントロール装置を有するコンピューター制御のコントロール装置を設ける。二つの点を選択することにより作業空間を決定し、そこで手動レバーを使って方向を指定することにより二つの点の内の1つを目標点として決定し、手動レバー信号により旋回装置及び起伏装置用に目標速度を規定する。
(もっと読む)
クレーンの振れ止め制御方法
【課題】運搬先が毎回異なり、初期巻きロープ長の誤差やその変化がある場合でも、振れ角センサを用いることなく、振れ止め後の残留振れを十分小さくできるクレーンの振れ止め制御方法を提供する。
【解決手段】Input Shaping法によりクレーン5の走行計画を作成する走行計画作成ステップS1と、前記走行計画に基づいてクレーン5の運搬シミュレーションを行って残留振動幅を求める運搬シミュレーションステップS2と、前記残留振動幅が所定の閾値以下の場合に、自動運転作業指令を出力し、前記走行計画に基づき、横行し、かつロープの巻上げおよび巻下げにより目標位置まで運搬する自動運転制御ステップS5〜S7とを有する。
(もっと読む)
コンテナ取扱クレーンにおける揺れ防止システムを駆動かつ制御するための油圧モータ
本発明は、コンテナ取扱クレーンにおける揺れ防止システムを駆動及び制御するための油圧モータに関している。コンテナ取扱クレーンは、以下の問題を提示する。すなわち、トロリーが動くとき、負荷スプレッダを支持するケーブルは、前述の動きに対して長手方向に振動する。前記揺れ運動を低減するために現時点で使用されているシステムは、(i)それらが数多くのパワー伝達要素を備えており、そのためにメンテナンス問題が生じる、及び(ii)その2つの主要な機能、すなわち動きの伝達と振動の低減とが別個に行われる、という理由のために不便である。前述の問題は、油圧モータを使用する自律的な独立した駆動システムによって解決されることができて、それによってパワー伝達駆動チェーンを単純且つロバストで信頼性が高く且つ維持しやすいものにする。加えて、モータは、その主要な機能、すなわち動きの生成及び振動の低減を同時に実行する。本発明によれば、圧力制限装置が使用されて、揺れ運動の間にモータに印加される圧力点が減衰される。このシステムはモータ上の圧力をバランスし、このようにして振動運動をオフセットする。  (もっと読む)
(もっと読む)
コンテナクレーンの対象物位置計測装置と該対象物位置計測装置を用いた自動荷役装置
【課題】スプレッダと吊り上げ目標コンテナ、吊り荷コンテナと積載目標物の位置を同時計測し、積み込み積み卸し時の位置決めを正確に行えるようにする。
【解決手段】トロリー8に巻上げロープ10を介して懸吊されたスプレッダ9にて保持されるコンテナ11の長手方向一端よりも外方位置となるように、トロリー8の横行方向と直角方向の一側に、レーザレーダ19を取付部材32を介して取り付ける。トロリー8に懸吊されたスプレッダ9、スプレッダ9に保持した吊り荷コンテナ11と、その下方に位置する、吊り上げ目標コンテナ11、又は、吊り荷コンテナ11の積載目標物を、レーザレーダ19により斜め上方より走査して3次元位置を同時計測し、その3次元位置情報を基に、スプレッダ9下面と吊り上げ目標コンテナ11の上面、又は、吊り荷コンテナ11下面と積載目標物の上面が一致するよう上記巻上げロープ10の長さとトロリー8の横行を制御させる。
(もっと読む)
ブーム式クレーンに用いられる吊荷の荷おろし方法及び装置
【課題】吊荷を荷おろし箇所に荷おろしする際に、吊荷から荷おろし箇所に水平分力が生じることがないブーム式クレーンの荷おろし装置を提供する。
【解決手段】コントローラ11に、荷おろし指令手段14及び負荷検出手段13からの検出信号を入力し、コントローラ11で下記の第一手順及び第二手順を実行する。
第一手順は、荷おろし指令手段14からの荷おろし指令信号を受け取ったときは、負荷検出手段14の検出信号で吊荷12が接地したことが検出されるまで、ウインチ制御弁10aにウインチ巻下指令信号を出力する。
第二手順は、第一手順の完了後、起伏制御弁8aにブーム倒伏指令信号を出力する。
(もっと読む)
揺れ制御のためのシステム及び方法
積み荷搬送システム(200、600)における揺れの測定及び制御のためのシステム、方法及びコンピュータプログラムコードが提供され、これらのシステム、方法及びコンピュータプログラムコードはクレーンからつり下げられた積み荷のようなつり下げられた積み荷(108)の揺れを測定及び制御するためにマイクロ・エレクトロ・メカニカルシステム(MEMS)デバイス(202、204、302、304、602)を使用することを含む。  (もっと読む)
(もっと読む)
クレーン及びそのコントローラ
フィルタ部を有するコントローラをフィードフォワード制御プログラムによって作動させることによって、クレ−ンのロープにより吊り下げられた荷を第1位置から第2位置まで搬送した時点で発生する荷の振れを抑制するようにクレーン駆動装置を制御する方法と装置を提供する。方法は、ロープの振れの回転中心から荷の重心までの距離であるロープ長から逐次演算される共振周波数と、クレーン駆動装置の性能を超えないように予め別途演算された前記クレーン駆動装置の制御装置に関するパラメータとの下に、前記荷の搬送指令における搬送速度、搬送加速度および搬送加々速度の少なくとも1つのものにおける最大値を制限した搬送指令から共振周波数付近の成分をフィルタ部によって除去し、共振周波数付近の成分が除去された搬送指令をクレーン駆動装置に入力して荷を第1位置から第2位置まで搬送した時点で大きく振れないようにクレーン駆動装置を制御する。 (もっと読む)
1 - 17 / 17
[ Back to top ]