
Fターム[3F333FE03]の内容
フォークリフトと高所作業車 (11,384) | 制御機器 (803) | 検知器 (445) | スポット検知(リミットスイッチ等) (88)
Fターム[3F333FE03]に分類される特許
1 - 20 / 88
作業用車両のジャッキ作動制御装置
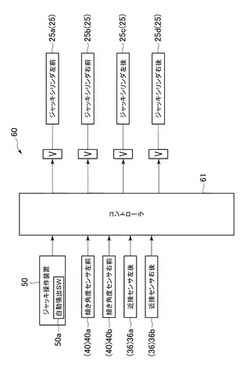
【課題】ジャッキの下に敷木をずれがなく短時間で設置でき、また敷木が設置される地面の確認や障害物の確認ができる作業用車両のジャッキ作動制御装置を提供する。
【解決手段】高所作業車1のジャッキ作動制御装置60は、車体に設けられ車体の少なくとも下方に張り出して車体を支持するアウトリガジャッキと、このジャッキの伸縮作動を操作するジャッキ操作装置50と、ジャッキ操作装置50の操作に応じてアウトリガジャッキのジャッキシリンダ25の伸縮作動を制御するコントローラ61とを備え、コントローラ61は、ジャッキ操作装置50の自動張出SW50aによってアウトリガジャッキを自動張出させる操作がされると、各ジャッキシリンダ25が接地する手前の位置でジャッキシリンダ25の伸長作動を停止させ、その後の自動張出SW50aの操作によって各ジャッキシリンダ25を伸長させる。
(もっと読む)
フォークリフト

【課題】フォークの昇降操作とフォークの水平操作を同時に行う操作をした場合において、フォークの揚高を考慮しつつより安定した動作を行うことのできるフォークリフトを提供すること。
【解決手段】フォークリフト1は、傾動手段60と、ティルトレバー40と、ティルト操作検出手段62と、昇降手段64と、リフトレバー50と、リフト操作検出手段66と、揚高検出手段80と、荷検出手段90と、補助スイッチ52と、ティルト角検出手段70と、制御手段74とを備えている。制御手段74は補助スイッチ52が操作され、リフト操作検出手段66がフォーク30の上昇の操作を検出し、荷検出手段90がフォーク30に荷があることを検出し、ティルト角検出手段70の情報からフォーク30が水平でないと検知し、揚高検出手段80で検出されたフォーク30の揚高が第1の閾値以下であると、フォーク30の上昇と共にフォーク30が水平となるように昇降手段64、傾動手段60を制御する。
(もっと読む)
把持装置
【課題】ワークの形状に寄らず十分な把持力を安定して与えることができ、かつこれを簡易な構成で実現できる把持装置の提供にある。
【解決手段】把持装置は、一対のアーム21に接続された一対の補助プレート22に、一対の把持部材40が着脱可能に設けられる。把持部材40には長孔が設けられ、把持部材40の内部に収容された袋体62が膨張して突出可能である。袋体62は膨張時に、ワークWに接触する。ワークの硬度を硬度センサにより検出し、袋体62の膨張を停止する膨張停止内圧を決定する。袋体62にボンベにより空気を供給し、膨張停止内圧まで膨張させ、ワークWを確実に把持させる。
(もっと読む)
ハンド走行リフター
【課題】ハンドルに設けた歪量に応じたモータの駆動を行うハンド走行リフターにおいて、後輪が浮き上がった際に、その浮き上がりを押さえ込むべくハンドルを押さえ込むと、ロードセルに歪が生じ、これにより前輪が駆動されると危険であるという問題がある。
【解決手段】後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
(もっと読む)
油圧システムおよび該油圧システムを備えたフォークリフト
【課題】所定の順序動作が失われた場合であっても、容易に所定の順序動作に復帰させることができる油圧システムおよび該油圧システムを備えたフォークリフトを提供する。
【解決手段】フォークを昇降させる第1油圧シリンダ5と、第1油圧シリンダ5が設けられたインナマストを昇降させる第2油圧シリンダ6A、6Bと、第1および第2油圧シリンダ5、6A、6Bを接続する配管11、12と、油圧装置10Aとを備えた油圧システム1Aであって、油圧装置10Aは、油圧ポンプ15および油圧モータ16と、第1および第2油圧シリンダ5、6A、6Bの動作を検知する検知手段17a、17bと、第1および第2油圧シリンダ5、6A、6Bが所定の順序で動作しているかどうかを判定する順序判定部18と、順序判定部18により所定の順序で動作していないと判定されると油圧モータ16の回転数を減少させる制御部19と、を有することを特徴とする。
(もっと読む)
把持装置
【課題】ワークの重さまたは硬さに応じた好適な把持力でワークを把持し得る把持装置を提供する。
【解決手段】把持装置1は、一対のアーム5によりワーク9を把持する。一対のアーム5は、それぞれアームベース5aを有し、一対のアームベース5aが近接及び離隔可能で、一対のアームベース5aの間隔が開閉機構3によって変えられる。一方のアーム5は、一対のアームベース5aの間にてアームベース5aに近接及び離隔可能に設けられる中間部材5bと、中間部材5bを他方のアーム5に向けて付勢する中間付勢部材と、中間部材5bに対して近接及び離隔可能に設けられかつワーク9に接触可能な接触部材5cと、中間付勢部材の付勢力と異なる大きさの付勢力によって接触部材5cを他方のアーム5に向けて付勢する先端付勢部材とを有する。
(もっと読む)
高所作業車におけるバケットとウインチ取付台との干渉防止装置
【課題】ウインチ取付台側の突出部が、ウインチ取付台の下動状態でバケット上面より低位置まで降下するような高所作業車において、バケットの左右旋回範囲を制限することで、バケット上部がウインチ取付台側の突出部に干渉しないようにする。
【解決手段】ウインチ取付台の下部の一部にバケット上面の外形と上下に重合するような突出部を有し、ウインチ取付台が下動位置にあるときにウインチ取付台の突出部がバケット上面より下方に位置するように設定された高所作業車において、バケット指向角度検出器13とウインチ取付台指向角度検出器14を設け、該バケット指向角度検出器とウインチ取付台指向角度検出器とでそれぞれ検出した各側の指向角度に基いて、バケット危険側作動規制手段16によりバケットの外形がウインチ取付台の突出部に対して上下に重合する位置に旋回するのを禁止するようにしている。
(もっと読む)
リフトチェーンのメンテナンス時期告知装置
【課題】 フォークリフト等の荷役車両に用いられるリフトチェーンのメンテナンス時期告知装置であって、リフトチェーンの伸び量を逐一測定する必要がなく、それでいてリフトチェーンが伸びてメンテナンスの時期に達した際には、これが容易に判る様にする。
【解決手段】 マスト2、キャリッジ3、リフトチェーン4、チェーン検出器5、告知器6とで構成し、とりわけ、リフトチェーン4が所定量だけ伸びた事を検出するチェーン検出器5と、チェーン検出器5からの信号に依りリフトチェーン4が伸びた事を告知する告知器6とを設ける。
(もっと読む)
長尺物品用の搬送装置
【課題】長尺状の物品を移載対象箇所との間で適切に移載できる長尺物品用の搬送装置を提供すること。
【解決手段】索状体を巻回駆動して昇降体6及びこれに装備された移載装置5を昇降駆動する昇降駆動手段と、昇降駆動手段及び移載装置5の作動を制御する制御手段と、昇降体の昇降位置を検出する昇降位置検出手段が設けられ、制御手段が、昇降体6の端部が移載対象箇所における受止部64により受け止め支持された状態で移載装置5を搬送作動させる移載処理を実行し、移載処理の実行中において、物品Wが物品移載方向に搬送されるに伴って変化する昇降体6に作用する荷重の変化による昇降体6の昇降位置の変化を吸収するべく、昇降位置検出手段の検出情報に基づいて昇降駆動手段の作動を制御する昇降位置調整処理を実行するように構成されている長尺物品用の搬送装置。
(もっと読む)
フォークリフト
【課題】車体のバッテリ収納部に収納されたバッテリが、走行中に確実に引き出されることがないように安全性を向上させる。
【解決手段】バッテリ収納部から引き出されないようにバッテリを解除可能にロックするロック機構19は、バッテリを収納部にロックするロック部材40と、回動することによってロック部材40を昇降させる回動レバー50とを備える。さらに、車体のデットマンブレーキを操作するブレーキペダル60に突出部64を設け、ロック部材40に切欠き(挿入部)43を設ける。ロック部材40によってバッテリがロックされた状態で、ブレーキペダル60を踏み込むと(走行すると)、突出部64が切欠き43に挿入される。このとき、ロック部材40を上昇させようとしてもロック部材40は突出部64に係止される。すなわち、走行中には回動レバー50の回動が制止され、バッテリのロックを解除できないようになっている。
(もっと読む)
リーチ式フォークリフト
【課題】迅速且つ安全に高揚高での荷役作業を行い得るリーチ式フォークリフトを提供する。
【解決手段】後方の本体部3及び本体部3から前方に突出された左右一対のアウトリガー部を有する車両本体と、車両本体のアウトリガー部に前後方向で設けられたガイド溝に移動可能に案内される荷役装置とを有するリーチ式フォークリフトであって、荷役装置を、両側面にガイド溝に案内される前後一対のガイドローラが夫々設けられた移動体と、移動体に、昇降用シリンダ装置13aを介して少なくとも昇降自在に設けられた荷物保持用のフォーク部とから構成し、更にフォーク部の高さを検出するリミットスイッチ24と、フォーク部に作用する荷重を検出する圧力計38及び荷重演算部39とを具備させ、且つ両検出値に基づいて、荷役装置の前後方向における移動速度と車両本体の走行速度とを制限する速度制御部51を具備させたことを特徴とするリーチ式フォークリフト。
(もっと読む)
高所作業車の安全確認装置
【課題】 フックの係止を示す発光部が周辺の明るさに影響を受けることなく視認性に優れ、しかも既存の作業台への後付けが容易な高所作業車の安全確認装置を提供する。
【解決手段】 フック22を係止する係止棒と、係止棒に係止したフック22をバネで付勢して押し付ける押付板33と、押付板33を動かしてフック22を係止棒に係止するための間隙を形成するレバー35と、押付板33に突設したシャフトの移動位置によって係止棒に係止したフック22が押付板33で押し付けられていることを検出する接触式のセンサーと、センサーがフック22の係止を検出すると点灯する監視ランプ39とを作業台15に後付けできるケーシング31に取り付ける。監視ランプ39は、ケーシング31の下面に設けて下向きに且つ制限された領域に照射できるようにする。
(もっと読む)
昇降装置における昇降体吊垂駆動用チェンの切断検知装置
【課題】昇降体の上方と下方に対峙したスプロケットホイール間に張架する吊垂駆動用チェンの両端を昇降体の上面部と下面部に固定する際、少ない切断検知センサにていずれの吊垂駆動用チェンの切断をも瞬時に検知できるようにした昇降装置における昇降体吊垂駆動用チェンの切断検知装置を提供すること。
【解決手段】マストをガイドとして左右の昇降支持装置A1、A2の吊垂駆動用チェン2により昇降体Eを昇降可能に配設して構成する昇降装置において、昇降体Eの上方と下方に対峙したスプロケットホイール1間に張架する2条平行する吊垂駆動用チェン2の一方の端部をバランス機構Bを介して昇降体Eの上面部に固定し、吊垂駆動用チェン2の他方の端部を昇降体Eの下面部に固定し、かつこれに切断検知機構8を配設して構成する。
(もっと読む)
作業用車輌
【解決手段】有人/無人切換スイッチ手段が無人運転に切換えられ(ST01)、無人検出手段からの無人情報を得る(ST02)と共に、自動運転起動スイッチ手段がオンになる(ST03)という、3つの条件が満たされたときに無人運転が開始される(ST04)。
【効果】自動運転起動スイッチ手段は、ステップから下りた運転者によって操作される。そのため、運転者がステップに乗っているときに、無人運転が起動される心配はない。
また、無人運転中に、何らかの理由で運転者がステップに乗った場合には、条件の1つが欠落するため、車体は停止される。
(もっと読む)
荷役車両
【課題】登坂走行での発進時に車体の後退を防止する。
【解決手段】リフト装置と走行装置と制動機構とを具備したフォークリフトにおいて、インチング機能を有する第2ブレーキペダル33aの踏込みを中間検出位置で検出するインチング圧力スイッチ40と、荷役操作レバー42aがリフト側に操作されたことを検出するリフト検出圧力スイッチと、前後進レバーにより操作されて前進用、後進用クラッチに作動油を供給、停止し接続、分離可能なセレクトバルブとを有し、セレクトバルブは、リフト検出圧力スイッチとインチング圧力スイッチ40の検出により、クラッチへの作動油圧の供給を停止するように構成された。
(もっと読む)
高所作業車のデッキ装置
【課題】 伸縮ブームを前向きに格納するようにした高所作業車において、キャブ上のデッキに柵を固定状態で設けると、伸縮ブームを柵より高い位置まで起仰させないと水平旋回させることができず、伸縮ブームの旋回可能高さが高くなる(ブーム作業範囲が制限される)。
【解決手段】 バケット3付きの伸縮ブーム2を車輌前方側に向く姿勢で格納するようにした高所作業車において、車輌1のキャブ11の上面位置に格納位置にあるバケット3への乗降用のデッキ4を取付けるとともに、該デッキ4の外側縁部41に可動柵5を高高さの使用姿勢と低高さの格納姿勢との間で変位可能に設置し、可動柵5を使用姿勢にすることによりデッキ4上での作業が安全に行えるとともに、可動柵5を格納姿勢にすることにより伸縮ブーム2の水平旋回時の高さを可及的に低くできるようにしている。
(もっと読む)
積荷取扱クランプの制御システム
積荷取扱クランプ(10)の制御システムは、第1積荷接触面および第2積荷接触面(20,22)を有し、該積荷接触面間に配置する積荷(12)を選択的に把持および釈放する。これら積荷接触面のうち少なくとも一方を、液圧アクチュエータ(26,28)によって他方の積荷接触面に向けて選択的に移動可能とする。少なくとも1個の流体バルブ組立体(70)は、積荷クランプ動作において、アクチュエータ対して、積荷接触面のうち一方を他方に向けて移動させることが可能な最大液圧クランプ圧力を可変的に調整することができる。積荷ジオメトリセンサは(50)、積荷における幾何学的形状のジオメトリプロファイルの関数として変化する電気的効果を生成するのが好ましい。データレシーバ(32)は、積荷ジオメトリ以外で、少なくとも1個の積荷の特徴に関する積荷識別情報をも取得するのが好ましい。制御器(40)は、データレシーバおよび積荷ジオメトリセンサに応答して、最大液圧クランプ圧力によるバルブ組立体の調整を制御するように動作する。初期クランプ閉鎖動作中に、積荷クランプ動作に対する予備段階として、制御器は、最大液圧クランプ圧力よりも大きい最大液圧閉鎖圧力でのアクチュエータに対して、積荷接触面のうち一方を他方に向けて移動させることができるようにするのが好ましい。その後、制御器は、実質的に最大液圧クランプ圧よりも大きくない圧力レベルでの積荷クランプ動作を可能にする。  (もっと読む)
(もっと読む)
パレット孔検出装置
【課題】使用環境に影響されることなくパレットの孔を検出し、またパレットの材質によらず正常に動作するパレット孔検出装置を提供する。
【解決手段】パレット孔検出装置5は、フォーク1が孔6に進入する方向へ向けて下降傾斜する姿勢でフォーク1の上方へ突出した上接触片7と、上接触片7に上端3が接触したことを検知する上限検知スイッチ8と、フォーク1が孔6に進入する方向へ向けて上昇傾斜する姿勢でフォーク1の下方へ突出した下接触片9と、下接触片9に下端4が接触したことを検知する下限検知スイッチ10とを備える。
(もっと読む)
自動倉庫システムにおけるスタッカクレーンの基準位置補正方法
【課題】入基準位置補正の作業を実施しても入出庫等の通常作業への影響を最小限となるようにし、かつ、基準位置補正に必要なスタッカクレーンの移動を最小限に留めることができる自動倉庫システムにおけるスタッカクレーンの基準位置補正方法を提供する。
【解決手段】スタッカクレーン15に設けた光学式の測距センサ31と、測距センサのレーザ光を反射させる地上設置の反射体と用いたスタッカクレーン15の基準位置を補正する。自動倉庫システムの稼動中に基準位置補正の必要性を判別するステップと、基準位置補正が必要と認識されたとき、基準位置付近にてスタッカクレーン15が動作完了する特定作業の有無を判別するステップと、特定作業が存在するとき、特定作業の終了後に基準位置補正を行うステップと、特定作業が存在しないとき、予め設定した許容設定時間後に基準位置補正を行うステップとを含む。
(もっと読む)
軌道作業車
【課題】軌道走行用車輪の位置に基づいてジャッキ装置の伸長量を決定することで、高精度で信頼性の高い支持状態を得るようにした軌道作業車を提供する。
【解決手段】軌道作業車Zの前後左右に配置されたジャッキ装置8,9と、軌道作業車Zの軌道走行用車輪12,13による支持状態を検出する支持状態検出手段16と、該支持状態検出手段により軌道走行用車輪の非支持状態検出時にジャッキ装置の伸長動作を規制するジャッキ伸長規制手段101を備えているので、作業時には常に軌道作業車Zがジャッキ装置によって支持され、軌道作業車Zの支持状態が安定し作業上における高い信頼性が確保されるとともに、ジャッキ装置の伸長量が軌道走行用車輪の位置検出に基づいて決定されることから、ジャッキ装置の設置後における軌道走行用車輪と軌道Rとの相対関係を精度良く決定することができ、軌道作業車の支持性能上における信頼性が向上する。
(もっと読む)
1 - 20 / 88
[ Back to top ]