
Fターム[3G093CB06]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646) | 加速時 (537)
Fターム[3G093CB06]に分類される特許
141 - 160 / 537
車両の制御装置
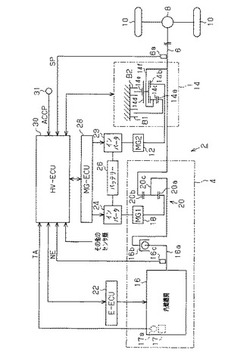
【課題】パワーモードが選択されている場合と通常モードが選択されている場合とで内燃機関の要求出力が同一となるときであれ、パワーモードが選択されている場合には通常モードが選択されている場合に比べて大きな加速感を得ることのできる車両の制御装置を提供する。
【解決手段】車両は、クランク軸16aの回転駆動力を回転出力軸6に伝達する際の変速比を無段階に変更するMG1を備える。また、HV−ECU30は、アクセル開度ACCPが全開とされるとき、目標回転速度NEtrgまで機関回転速度NEを上昇させる際に、パワーモードが選択されている場合には通常モードが選択されている場合に比べて、機関回転速度NEの上昇速度が大きくなるようにMG1の作動制御を実行する。
(もっと読む)
車両用制御装置

【課題】車両の惰性走行時において、運転者が、車速が増速することによって感じる違和感を抑制する。
【解決手段】内燃機関10を作動状態にして、機関出力のうち駆動輪94に伝達される駆動動力により車両1が駆動されて加速して走行する加速走行と、内燃機関10を非作動状態にして、慣性力により車両1が惰性で走行する惰性走行とを、予め設定された車速域R内において交互に繰り返し行って走行する加速惰性走行を車両1に行わせる。HVECU100は、前記惰性走行中において、速度状態判定手段により、車両1の速度状態が増速状態であること、もしくは車両1の速度状態が増速状態になることの少なくともどちらか一方を判定したとき、加速惰性走行を禁止する。
(もっと読む)
車両用制御装置
【課題】車両の加速走行時において、車両が下り勾配を走行すると、燃料消費量の少ない走行を行うことができる。
【解決手段】内燃機関10を作動状態にして、機関出力のうち駆動輪94に伝達される駆動動力により車両1が駆動されて加速して走行する加速走行と、内燃機関10を非作動状態にして、慣性力により車両1が惰性で走行する惰性走行とを、予め設定された車速域R内において交互に繰り返し行って走行する加速惰性走行を車両1に行わせる。HVECU100は、前記加速走行中において、前記車両1が路面勾配が下り勾配の路面を走行すると、現車速VRから前記設定された車速域Rの上限に達するまで前記加速走行を行わせる場合の加速時燃料消費量F1に基づいて、前記加速走行の維持、または、前記惰性走行への切り替えのいずれかを選択することを特徴とする。
(もっと読む)
車両駆動システムの制御装置
【課題】エンジンと第1及び第2のMG(モータジェネレータ)を搭載したハイブリッド車において、動力伝達系の振動を抑制するように第2のMGを制御する制振制御の実行中でも、エンジンの失火の有無を精度良く判定できるようにする。
【解決手段】エンジン回転変動情報(エンジン回転変動又はこれに関連性のある情報)を失火判定値と比較してエンジン11の失火の有無を判定する失火判定を行う際に、制振制御の実行中は、エンジン回転変動が小さくなると判断して、制振制御の実行中の失火判定値を通常の失火判定値(制振制御の停止中の失火判定値)よりも失火有りと判定し易くなる方向に変更する。これにより、制振制御の実行中でも、エンジン11の失火の有無を精度良く判定することが可能となり、実際には失火が発生しているにも拘らず、制振制御の影響でエンジン回転変動が小さくなった状態を失火無しと誤判定することを防止できる。
(もっと読む)
車両の制御システム
【課題】 モータ回路の過熱保護のために操舵アシストを制限する必要があるときには、運転者に対して電動モータ20が過負荷となるような操舵操作を抑制させる。
【解決手段】 モータ温度Tが第1基準温度T1を越えた場合に、報知器54,55の報知開始閾値を低減する。これにより、車両の横滑りあるいは駆動輪のスリップに対して、早めに報知器54,55が作動する。運転者は車両の走行状態が車両限界に近いものと思い、自然に運転を抑制する。モータ温度Tが第2基準温度T2(>T1)を越えた場合に、スキッド制御の制御開始閾値を低減する。これにより、車両の横滑りあるいは駆動輪のスリップに対して、早めにスキッド制御が開始され、車速が上がりにくくなり操舵速度が低下して電動モータ20の負荷が軽くなる。
(もっと読む)
パワートレーンのエンジン回転速度制御装置
【課題】アクセルペダルを一旦踏み込んでも、直後にアクセルを戻し操作するとき、無駄にエンジン回転を上昇させることのないようにして、燃費の悪化を防止する。
【解決手段】通常、加速時は最適燃費線上で運転点を例えばYからX1へ移動させて増大後エンジン要求出力Pe3を実現するが、この場合、エンジン回転上昇量が大きくて、これに消費される燃料量が多く、直後にアクセルを戻す場合、燃費の悪化を生ずる。そこで、加速時に直ちに運転点をYからX1へと移行させず、一時的にこの運転点X1よりも低エンジン回転数Nex2の低回転運転点X2(エンジントルクはTex2)で増大後エンジン要求出力Pe3を実現させ、X1に対するX2の燃費悪化分燃料増大量が、Y→X1時のエンジン回転上昇用燃料消費量よりも大きくなると判定したときに、運転点をX2からX1に移行する。よって、この判定前にアクセル戻しがなされた場合、ΔNex(=Nex1-Nex2)だけ無駄にエンジン回転を上昇させなかったことになり、燃費の悪化を防止し得る。
(もっと読む)
車両の制御装置および制御方法
【課題】補機の作動開始時の車両の加速および燃費の悪化を抑制する。
【解決手段】ECUは、定常走行中であって(S100にてYES)、補機作動中に(S102にてYES)、ガード値Eを設定するステップ(S104)と、今回のスイープアップ量SWP(I)を算出するステップ(S106)と、SWP(I)がガード値Eよりも小さい場合に(S108にてNO)、SWP(I)を最終的なスイープアップ量SWPとして更新するステップ(S110)と、SWP(I)がガード値以上である場合(S108にてYES)、ガード値Eを最終的なスイープアップ量SWPとして更新するステップ(S112)と、第3の要求量を算出するステップ(S114)と、算出された第3の要求量に基づいてCVTを制御するステップ(S116)とを含む、プログラムを実行する。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置にて、加速要求があった場合における合計トルクの増大方向の応答を改善すること。
【解決手段】E/G側駆動トルクの指示値Tet及びM/G側駆動トルクの指示値Tmtは、通常、アクセル開度の現在値及び車速の現在値と定常マップとから得られる、E/G側駆動トルクの定常適合値及びM/G側駆動トルクの定常適合値にそれぞれ算出される。一方、加速要求時では、これに代えて、E/G側駆動トルク及びM/G側駆動トルクのうち増大方向の応答が遅い方の駆動トルクの指示値が一定に維持されるとともに増大方向の応答が速い方の駆動トルクの指示値が増大されることで合計トルク(=E/G側駆動トルク+M/G側駆動トルク)の指示値Tstが増大される。これにより、合計トルクTsの増大方向の応答が速い状態を安定して維持することができる。
(もっと読む)
車両用駆動力制御装置
【課題】ロードロードに釣り合う駆動力Nbを発生させるアクセルペダルの開度(釣合点A)を車両Veの走行環境に応じて設定することにより、アクセルペダルのみの操作によって車両Veの駆動力Nを制御することができる制御装置を提供する。
【解決手段】ロードロードに釣り合う駆動力Nbを発生させるアクセルペダルの開度(釣合点A)を、自車両の駆動モード、およびナビゲーションシステムもしくは車両間通信システムによって得られた道路勾配、路面摩擦係数、横風の強度、渋滞情報、コーナーの有無情報、前方車両との間隔などの走行環境に応じて設定する。したがって、アクセルペダルのみの操作によって車両Veを減速させることのできる減速領域あるいは加速することのできる加速領域を任意に設定することができるので、アクセルペダルのみの操作によって車速Vを制御することを可能にすることができる。
(もっと読む)
ハイブリッド自動車および車載用変速機の変速時の制御方法
【課題】加速中に変速機を変速するときのトルクショックを低減する。
【解決手段】加速中に変速機をアップシフトするときには、変速前に駆動軸に走行抵抗に釣り合うトルクTdrvがエンジンから動力分配統合機構を介して出力されるようエンジンの目標トルクTe*を設定して制御してブレーキB2をオフし(S100〜S150)、モータMG2の回転数Nm2を変速後の回転数Nm2tgに同期させる直前にモータMG2の回転数Nm2が同期するときにモータMG2の回転数Nm2の変化率が急変するときに生じる変化率の急変を抑制する方向に作用するトルクを打ち消す方向でこれより小さなトルクを駆動軸に作用させるためにエンジンから出力するトルクとして同期時補正トルクTajを演算し(S190)、この同期時補正トルクTajによりエンジンの目標トルクTe*を補正して制御してブレーキB1をオンする(S200〜S220)。
(もっと読む)
車両のオートクルーズ装置
【課題】加速中に前方車両が直前に車線変更した場合や、低速走行の前方車両が直前に車線変更した場合でも、車速の急変を生じないオートクルーズ制御となす。
【解決手段】S11で通常のオートクルーズ用の基本加減速度ABを計算する。S12では、隣接車線走行中の左右前方車両が自車線へ車線変更する可能性(車線変更度PL,PR)を演算する。S13では、左右前方車両と自車との間における時間的車間距離(自車が前方車両に到達するまでの時間)TYL,TYRを演算する。S14では、左右前方車両の車線変更度PL,PR、および、左右前方車両との間の時間的車間距離TYL,TYRから、左前方車両を考慮した場合の加速度上限値ALと、右前方車両を考慮した場合の加速度上限値ARとを求め、両者のうちの小さい方を最終的な加速度上限値Aとする。S17では、ABを自車が発生するようアクセルペダルやブレーキ装置を駆動する。
(もっと読む)
車両制御装置
【課題】副駆動源であるモータに交流電流を供給するインバータにおいて無駄に消費される電力を低減することのできる車両制御装置を提供する。
【解決手段】ハイブリッドコントロールコンピュータ100が制御する車両は、主駆動源として前輪20L,20Rを駆動するハイブリッドシステム200を搭載しているとともに、副駆動源として同ハイブリッドシステム200によって駆動されない後輪30L,30Rを必要に応じて駆動するシンクロナスリラクタンスモータ300を搭載している。ハイブリッドコントロールコンピュータ100は、車両走行中であっても、後輪30L,30Rを駆動する必要がない状態のときに後輪駆動用インバータ530への給電を停止する。
(もっと読む)
車両制御装置
【課題】 坂路における車速制御の応答性を高めることができる車両制御装置を提供する。
【解決手段】 各車輪FL,FR,RL,RRに制動力を発生させるホイルシリンダW/Cと、路面の勾配を検出するコンバインセンサ33と、路面勾配に応じた駆動力を演算し、設定された制御目標速度になるように前輪FL,FRに対して駆動力を作用させる速度制御中であって、路面勾配とは別の路面状態(路面μ)に応じて演算された制動力を発生させ、車輪の回転速度を制御する液圧ユニット31と、液圧ユニット31をコントロールするブレーキCU32と、を備えた。
(もっと読む)
車両およびその制御方法
【課題】エネルギ効率の向上と乗員に与える違和感の抑制との両立を図る。
【解決手段】緩やかに加減速している最中や高速で定常走行しているときには、燃料消費率が最小となる燃料噴射量Fで燃料噴射を行なうと共にエンジン22を効率よく運転可能な点火エネルギEfire,点火回数Nfireで点火を行ない(ステップS100〜S160,S210)、低速で定常走行しているときには、燃料消費率が最小となる燃料噴射量Fで燃料噴射を行なうと共により高いエネルギE2で点火し(ステップS100〜S140,S170,S180,S210)、急加速や急減速している最中には、燃料消費率が最小となる燃料噴射量Fで燃料噴射を行なうと共により高いエネルギE2でより多い回数N2で点火する(ステップS100〜S140,S190〜S210)。これにより、エネルギ効率の向上と乗員に与える違和感の抑制との両立を図る
(もっと読む)
トラクション制御装置及び方法
【課題】車両の荷重抜けに対応して駆動力を適切に制御する。
【解決手段】トラクション制御装置(100)は、車両(1)に搭載され、車両の駆動輪(DW)に伝達される駆動力を調節可能な駆動力調節手段(13、14)と、駆動輪のスリップ状態を検出するスリップ状態検出手段(20)と、車両の上下方向の接地荷重の変動を検出する接地荷重変動検出手段(24)と、スリップ状態検出手段により駆動輪のスリップ状態が検出されたことを条件に、検出された接地荷重の変動に応じて、駆動力を調節するように駆動力調節手段を制御する制御手段(20)とを備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ドライバーの加速フィーリングの向上を図ると共に、車両パワーを円滑に推移させることができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータ(モータ/ジェネレータ)MGを有する駆動源と、モータMGと駆動輪LT,RTとの間に配置された無段変速機CVTとを駆動系に備えると共に、無段変速機CVTの変速制御を実行する変速制御手段(図5)を備えたハイブリッド車両の制御装置において、モータMG及びバッテリ9の状態から、モータアシスト可能なアシストパワー量を算出するアシストパワー量算出手段(ステップS4)を備えている。そして、変速制御手段(図5)は、無段変速機CVTの変速比をダウンシフト方向に変速する車両加速中に、この変速比をアップシフト方向に間欠的に変速する。さらに、このアップシフトに伴って生じるエンジンパワー減少量は、アシストパワー量以下にする。
(もっと読む)
フィードバック制御装置
【課題】制御対象の状態が大きく変化する場合に、制御対象の出力検出値に含まれる揺動成分を確実に除去して、操作量の不必要な振動を回避する。
【解決手段】フィードバック制御を行う制御装置50において、制御対象14へ入力する操作量ICMDに基づいて制御対象14の出力を推定する制御対象モデル63aと、推定した出力と制御対象の検出値θcsとから算出した出力θ1から検出値θcsに含まれる検出値揺動量を算出するためのバンドパスフィルタ63c〜63eと、を備え、制御対象14の状態変化が大きくなるほど通過帯域幅を広げ、制御対象の状態変化が小さくなるほど通過帯域幅を狭める。
(もっと読む)
内燃機関の制御装置
【課題】強制パージ要求時での制御を適切に実行可能な内燃機関の制御装置を提供する。
【解決手段】上記の内燃機関の制御装置は、ハイブリッド車両に搭載され、エンジンと、第1及び第2のモータジェネレータと、制御手段とを備える。制御手段は、第1のモータジェネレータのトルクを決定するフィードフォワード項を算出するための推定エンジントルクの応答性を決定する時定数と無駄時間とを、強制パージ要求の有無に基づき変更する。
(もっと読む)
運転支援システム
【課題】よりエネルギー消費の少ない走行制御を行う。
【解決手段】自車1の走行時における車速情報を収集し、通信装置21を介して自車1と同一方向に走行中の周辺車両A〜Nから各車両の車速情報を取得するとともに、当該各車両の車速の平均値を算出し、自車1の車速と周辺車両A〜Nの車速の平均値との差異に基づいて自車1が周辺車両A〜Nに対して必要以上の加減速を実施したことを判定した場合、駆動制御装置10に加速を制限するように指示する。
(もっと読む)
水ジェット推進艇
【課題】陸上レーシングの際に、エンジンの負担の増大および排気音による騒音の発生を確実に抑制することが可能な水ジェット推進艇を提供する。
【解決手段】この水ジェット推進艇1は、船体2と、船体2内に配置されたエンジン3と、エンジン3の駆動力により船体2を推進させる際に水を後方に噴射するように構成された噴射口を有するジェット推進機と、エンジン3の回転数を制御するECU28と、船体2が少なくとも所定の高さ位置まで水に浸かっていることを検出する水検知センサ部17とを備えている。ECU28は、水検知センサ部17からの信号に基づいて、船体2が水中にあるか否かを判定するとともに、船体2が水中にないと判断した場合に、エンジン3の最高回転数を4000rpm以下に制限するように構成されている。
(もっと読む)
141 - 160 / 537
[ Back to top ]