
Fターム[3G093CB06]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646) | 加速時 (537)
Fターム[3G093CB06]に分類される特許
201 - 220 / 537
内燃機関の出力制御装置
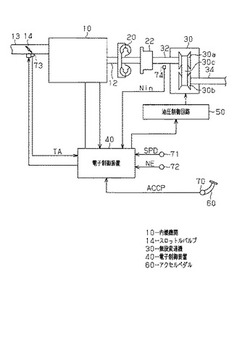
【課題】自動変速機の変速比が小さくなっているときに目標出力トルクが急増することにより生じるおそれのあるノッキングや駆動系でのショックを好適に抑制することのできる内燃機関の出力制御装置を提供する。
【解決手段】電子制御装置40は、アクセルペダル60の操作量、車速、及び無段変速機30の変速比の状態に基づいて内燃機関10の目標出力トルクを算出し、その目標出力トルクに基づいてスロットルバルブ14の目標開度を算出する。また、電子制御装置40は、無段変速機30の変速比についてその現状値が所定値よりも小さいときには、目標出力トルクに基づいて算出されるスロットルバルブ14の目標開度を予め設定された上限値以下の値に制限する。
(もっと読む)
車両走行制御装置及び車両走行制御方法

【課題】定速クルーズ走行中、運転者に違和感を覚えさせない車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】アクセルペダル12に対する反力Frを急増させるペダル操作量Pを、車両100が走行している際の目標スロットル弁開度θtと基準スロットル弁開度θrとの差D1、D2に応じて変化させる。これにより、車両100が坂道に差し掛かった等、車両100に対する外的負荷が変わったため、クルーズ速度Vcrを維持するためにエンジン30の出力を増減させる場合、前記外的負荷に応じてペダル操作量Pを変化させることができる。その結果、エンジン30の出力とペダル操作量Pのずれに起因する違和感が運転手に発生することを防止することができる。
(もっと読む)
車両の制御装置および制御方法
【課題】アクセル操作量に対して運転者の意図に沿ったトルクが出力されるように調整された車両の制御装置を提供する。
【解決手段】車両は、エンジン100と、エンジン100と動力伝達可能に設けられた自動変速機10とを有する。車両の制御装置は、運転者のアクセル操作量を検出するアクセル開度センサ460と、アクセル操作量を補正して目標量を算出し、目標量に基づいてエンジン100の出力を制御するECU1000とを備える。ECU1000は、自動変速機10のトルク増幅率が第1の増幅率である場合には、第1の増幅率よりも小さい第2の増幅率である場合よりも、アクセル操作量が同じ条件では目標量が小さくなるようにアクセル操作量の補正を行なう。
(もっと読む)
内燃機関の燃焼状態検出装置
【課題】ノックセンサの代わりに、クランク軸の回転変化を基にしてプレイグニッションの発生を判断することにより、コストアップ無しで簡単に実施可能な燃焼状態検出装置を提供する。
【解決手段】クランク角センサからの信号に基づいて内燃機関の回転情報を演算する回転情報取得手段と、各種センサからの信号に基づき演算範囲を決定する演算範囲決定手段と、上記各種センサの出力に基づき比較値を決定する比較値決定手段と、上記回転情報と前記演算範囲に基づきパラメータを演算するパラメータ演算手段と、上記パラメータと比較値に基づきプレイグニッションの発生を判断するプレイグニッション判断手段と、上記クランク角センサ及び各種センサの出力に基づきプレイグニッション検出の実行を許可する実行判断手段とを備えたもの。
(もっと読む)
車両走行制御装置、車両走行制御方法、及び車両走行制御プログラム
【課題】先行車両の運転傾向を特定した上で自車両の追従制御を行うことのできる、車両走行制御装置、車両走行制御方法、及び車両走行制御プログラムを提供すること。
【解決手段】車両走行制御装置10は、自車両1に先行して走行する先行車両の所定期間の運転状態に関する運転状態情報を取得する運転状態情報取得部12aと、この運転状態情報取得部12aにて取得された運転状態情報に基づいて先行車両の運転傾向を特定する運転傾向特定部12bと、この運転傾向特定部12bにて特定された先行車両の運転傾向に基づいて、この先行車両に対する自車両1の追従制御を行う追従制御部12cを備える。
(もっと読む)
車両の制御装置及び制御方法
【課題】本発明は、車両の制御装置及び制御方法において、加速ピーク後の立ち下がり時の加速度を制御することで、立ち下がり時のトルク感のある加速度波形(G波形)を演出して、車両の加速感を高めることができる車両の制御装置及び制御方法を提供することを目的とする。
【解決手段】S7では、この目標加速度Gの時系列データをもとに、エンジン出力をフィードバック制御で制御する。具体的には、車両の実加速度Gが目標加速度Gとなるように、スロットル開度や点火タイミング等を変化させてエンジン出力を制御する。
(もっと読む)
車両の制御装置及び制御方法
【課題】本発明は、車両の制御装置及び制御方法において、加速ピーク後の立ち下がり時の加速度を制御することで、運転者の走りの意図を踏まえて、トルク感のある加速度波形(G波形)を演出して、運転者の要求を満足できる車両の制御装置及び制御方法を提供することを目的とする。
【解決手段】S7では、加速度Gデータの履歴と運転者の意図から目標加速度Gの時系列データを設定する。この目標加速度Gの時系列データは、図示しないマップデータで算出するようにしている。この目標加速度Gの時系列データは、運転者の意図に応じて変化するように設定している。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】駆動源の出力制御が解除されたときに、運転者自身のアクセルペダルの踏み込み量から予測される車両の挙動と実際の車両の挙動とがスムーズに合致しないと感じることがあった。
【解決手段】自車両のアクセルペダルの位置と駆動源の出力の調整量とについて予め設定された対応関係を適用せずに前記調整量が制御されることによって前記自車両が基準車速で走行する基準車速走行区間の終了地点を取得し、前記基準車速走行区間の終了地点を前記自車両が通過後、前記アクセルペダルの位置に前記対応関係を適用した場合に対応する調整量と実際の調整量とが不一致であるとき、第一変化度合いで前記調整量を変化させる。
(もっと読む)
車両用駆動装置の制御装置
【課題】走行駆動源としての電動機および変速部を備えた車両用駆動装置に対し、車両走行中の加速フィーリングを良好に得ることができる車両用駆動装置の制御装置を提供する。
【解決手段】エンジン8の始動動作時などのように無段変速部20の入力トルクに乱れが発生するときに、この無段変速部20の変速比を小さくする。また、同時に、第2電動機MG2のトルクを一時的に増大させる。これにより、第2電動機MG2のトルクの増大によって出力軸22のトルク低下を抑制することができ、無段変速部20の変速比を小さくしたことによるショックの低減と、車両の高い加速性能とを両立できる。
(もっと読む)
鞍乗型車両
【課題】急な加速によって最高速度に達したときの乗車フィーリングを損なうことを抑制した鞍乗型車両を提供する。
【解決手段】鞍乗型車両は、エンジン12と、エンジン回転速度Rを検出するエンジン回転速度検出部21と、燃料供給装置31と、エンジン回転速度Rが設定回転速度Rnに達すると、燃料供給装置31からの燃料供給を停止させる燃料供給制御部28と、設定回転速度Rnとして第1設定回転速度R1と、第2設定回転速度R2とを記憶したメモリ19と、を備え、燃料供給制御部28は、走行状態に基づいて、燃料供給を停止させる設定回転速度Rnを第1設定回転速度R1から第2設定回転速度R2に一時的に変更する。
(もっと読む)
車間距離制御装置
【課題】運転者の意図しない目標車間距離の変更を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの検出手段と、検出手段により検出した運転者の加速操作又は減速操作に基づいて目標車間距離を変更する目標車間距離変更手段とを備え、加速操作検出手段により検出した加速操作量が加速操作量閾値を超えた場合又は減速操作検出手段により検出した減速操作量が減速操作量閾値を超えた場合に目標車間距離変更手段による目標車間距離の変更を抑制することを特徴とする。
(もっと読む)
内燃機関の制御装置
【課題】燃料カットを実行する運転領域を拡大して燃費を向上させる。
【解決手段】アクセル操作が行われない状態でブレーキ操作が行われている期間に燃料カットを実行すると共に、燃料カットの実行中にブレーキ操作が解除された場合に、車両振動が発生するおそれがあると判定されている期間は燃料カットを継続し、車両振動が発生するおそれがなくなった時点で、燃料カットを中止して燃料噴射を再開する。但し、燃料カットの実行中にブレーキ操作が解除されたときに、車両振動が発生するおそれがあると判定されている場合であっても、運転者の加速要求が大きい場合は直ちに燃料カットを中止して燃料噴射を再開する。更に、燃料噴射の再開のみでエンジン11を始動可能である否かを判定し、燃料噴射の再開のみではエンジン11を始動困難であると判定したときにスタータ22を駆動して始動する。
(もっと読む)
車間距離制御装置
【課題】運転者の意図に反する目標車間距離の変更を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの操作検出手段と、車速検出手段と、操作検出手段により検出した運転者の加速操作終了時又は減速操作終了時の車間距離に基づいて複数段階で目標車間距離を変更する目標車間距離変更手段とを備え、車速検出手段により検出した車速が閾値以下の場合に目標車間距離設定手段による目標車間距離の変更を抑制することを特徴とする。
(もっと読む)
車両の制御装置及び制御方法
【課題】従来装置の燃料カットリカバー回転速度以下の回転速度域で新たに燃料カットを行わせると共に、再加速応答性を向上させ得る装置及び方法を提供する。
【解決手段】スタータを用いてクランキングを行うエンジンを有する車両において、車両の減速時にエンジンへの燃料供給を遮断する燃料供給遮断実行手段(4、21)と、この燃料供給遮断中に車両の再加速要求があったか否かを判定する再加速要求判定手段(21)と、この判定結果より燃料供給遮断中に車両の再加速要求があったとき、エンジンに負荷を入力するエンジン負荷入力手段(11、12、14、21)と、このエンジン負荷の入力によりエンジンが停止したとき、前記スタータによりエンジンをクランキングしてエンジンを再始動させるエンジン再始動手段(4、6、21)とを備える。
(もっと読む)
内燃エンジンの燃料リカバリ時の運転制御方法及び運転制御装置
【課題】燃料リカバリ時のさまざまなエンジン運転要素の制御に利用可能なエンジンの目標運転パラメータを提供する。
【解決手段】トルクをトルクコンバータ2を介して出力し、走行中に燃料カットを行なう車両用の内燃エンジン1の燃料リカバリ時の運転制御方法において、トルクコンバータ2のタービンランナ2Bの回転速度とポンプインペラ2Aの回転速度との速度比eを計算し、速度比eからトルクコンバータ2の容量係数Cを計算する。ポンプインペラ2Aの回転速度Nimpとトルクコンバータ2の容量係数Cからトルクコンバータの損失トルクTlossを計算し、損失トルクTlossを用いて計算した内燃エンジン1の目標出力トルクTrcvに基づき燃料リカバリ時の内燃エンジン1の運転状態を制御する。
(もっと読む)
車両パワートレイン制御方法及び該方法を実行するプログラム
【課題】車両運転条件にかかわらず、ドライバに心地よい加速感を与えることができる車両パワートレイン制御方法及び該方法を実行するプログラムを提供する。
【解決手段】車両を加速操作するための車両パワートレイン制御方法であって、車両加速要求に応じて車両を加速させるための所定期間継続する車両の一次目標加速度波形Aを演算する工程と、一次目標加速度波形Aの最大加速度GMAX_Aが所定制限加速度GMAXとなるように、一次目標加速度波形Aの振幅を前記所定期間TGにわたり略一定の割合(補正係数K)で減少補正した二次目標加速度波形Bを演算する工程と、二次目標加速度波形Bに基づいて車両パワートレインを制御する工程と、を備えた。
(もっと読む)
車両のトラクション制御装置
【課題】 駆動系のイナーシャ変化によらず安定したトラクション制御を達成可能な車両のトラクション制御装置を提供すること。
【解決手段】 トラクション制御装置において、トルク制御手段により駆動輪から路面に伝達される駆動力を所定量低下させるときに、動力源と駆動輪とを接続/解放するクラッチ要素の伝達トルク容量に応じて駆動力を低下させることとした。
(もっと読む)
自動変速機の制御装置
【課題】変速中、コースト走行状態からアクセル踏み込み操作を行ったとき、油圧サージの発生の防止とパワーユニットトルクの立ち上がり応答性確保との両立を図ることができる自動変速機の制御装置を提供すること。
【解決手段】摩擦締結要素31,32への作動油圧を制御すると共に、変速中、エンジン1から入力されるトルク上限を規定するエンジントルク制限値SlowTrqを設定する自動変速機の制御装置において、エンジントルク制限値SlowTrqの下限値として正の値による下限トルクLimLoを設定する下限トルク設定部(ステップS507)を設け、エンジントルク制限値設定制御手段(図5)は、コースト走行状態からのパワーユニットトルク上昇時、下限トルクLimLoから所定の変化率で増加させた値をエンジントルク制限値SlowTrqとして設定する。
(もっと読む)
自動変速機の制御装置
【課題】変速中にアクセル踏み込み操作を行ったとき、運転者に加速不足感を与えることを防止しつつ、油圧サージの発生を防止することができる自動変速機の制御装置を提供すること。
【解決手段】変速中のトルク相Bでは、入力トルクの変化に対して所定時間にて目標トルク容量を得るように摩擦締結要素31,32への油圧の変化勾配を切り替え、イナーシャ相Cでは、入力トルクの変化に対して目標トルク容量を確保するように摩擦締結要素31,32への油圧をリニアに追従させる油圧制御を行う変速油圧制御手段を備えた自動変速機の制御装置において、変速中、エンジン1から入力されるトルク上限を規定するエンジントルク制限値設定制御手段(図5)は、エンジントルク制限値SlowTrqの上昇勾配率である制限勾配値LimRmpのうち、トルク相Bでの制限勾配値LimRmpを、イナーシャ相Cでの制限勾配値LimRmpより小さな値に設定する制限勾配値設定制御部(図3)を有する。
(もっと読む)
内燃機関のトルク制御装置
【課題】加速時におけるレスポンスの悪化や燃費の悪化などを防止しつつ、加速ショックの発生を適切に抑制する。
【解決手段】内燃機関のトルク制御装置において、駆動系トルク算出手段は、加速時における要求トルクに基づいて、駆動系に作用する駆動系トルクを算出する。また、トルク制御手段は、駆動系トルク算出手段が算出した駆動系トルクに基づいて、駆動系トルクの勾配が所定値以下となるようにトルク制御を行う。これにより、駆動系の捩れ量を所定以下に保つことができるため、反復的なショックを抑制することができ、加速ショックを効果的に抑制することが可能となる。また、加速ショックが発生することを前提としてトルクをダウンさせるような制御を行うわけではないので、加速時におけるレスポンスの悪化や燃費の悪化などを適切に防止することが可能となる。
(もっと読む)
201 - 220 / 537
[ Back to top ]