
Fターム[3G093CB09]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 旋回走行時 (165)
Fターム[3G093CB09]に分類される特許
1 - 20 / 165
ハイブリッド車両のパワーステアリング装置
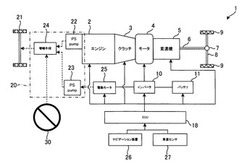
【課題】ハイブリッド車両の良好な燃費性能を確保しつつ、大きな要求操舵トルクにも要求可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】本発明に係るハイブリッド車両(1)のパワーステアリング装置(20)は、モータ回生走行時にエンジン(2)が停止状態にあり、且つ、クラッチ(3)が切断状態にある場合、自車から所定範囲内に大きな操舵力を要する走行予定経路が検出されないとき、増幅手段(24)の駆動源として電動モータ(25)を選択し、自車から所定範囲内に大きな操舵力を要する走行予定経路が検出されたとき、エンジン(2)を始動して、増幅手段(24)の駆動源としてエンジン(2)を選択することを特徴とする。
(もっと読む)
車両用走行支援装置

【課題】 交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供する。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンとモータを走行用動力源として有するハイブリッド車両において、簡素的な制御ロジックを用いて車両姿勢安定制御とスリップ率制御とを両立させる。
【解決手段】本発明に係るハイブリッド車両(1)の制御装置(14)は、車両姿勢を安定化する車両姿勢安定制御を実施する車両姿勢安定制御手段と、モータ(3)に駆動トルク又は回生トルクを付与してスリップ率制御を実施するスリップ率制御手段と、車両姿勢安定制御の実施時にモータの出力トルクを第1のモータトルクT1以下に制限し、車両姿勢安定制御の実施中に更にスリップ率制御を実施する場合、モータの出力トルクの制限を第2のモータトルクT2に変更するモータトルク制御手段とを備えたことを特徴とする。
(もっと読む)
車両の駆動力制御装置
【課題】操舵時に運転者が感じる違和感を抑えることのできる車両の駆動力制御装置を提供する。
【解決手段】電子制御ユニット1は、エンジン6から出力される駆動力をアクセル操作量に応じた駆動力よりも低下させる駆動力抑制処理を実行する。この駆動力抑制処理が実行されているときの駆動力は、車両の操舵角が大きいときほど小さくなるように制御する。
(もっと読む)
車両の制御装置
【課題】スタビリティファクタ演算式の補正を違和感やドライバビリティを損なうことなく実行する。
【解決手段】補正前の演算式で求められた駆動力の補正量と、補正後の演算式で求められた駆動力の補正量との差を算出し、その補正量の差が予め定めた判断基準値より大きいか否かを判定(ステップS15)し、補正量の差が予め定めた判断基準値より大きいことが判定された場合、スタビリティファクタを目標値に近づけるように駆動力を制御していることが判定(ステップS17)されれば、演算式の補正を禁止(リターン)し、かつ前記駆動力を制御していることが判定されなければ、演算式の補正を実行(ステップS18)する。
(もっと読む)
運転支援装置および該装置を有する車両
【課題】高精度な航続可能距離を推定することのできる運転支援装置を提供すること。
【解決手段】運転支援装置は、自車両の残エネルギErestと、走行経路の走行によって消費が予測される消費エネルギEsum(k)に基づいて航続可能距離Lを算出するものであって、走行経路と同一の距離を有する勾配のない平坦路を仮定して、その平坦路を基準車速で定速走行する場合に必要なエネルギEbaseと、走行経路の減速と再加速を要する加減速必要区間で必要な加減速を行って走行経路を走行する場合に発生するエネルギ差分である加減速由来補正量ΔEaccdecとを用いて、消費エネルギEsum(k)を算出する。
(もっと読む)
車両の制御装置
【課題】アクセル操作及びブレーキ操作が同時になされている同時操作状態が解除されて出力抑制制御を停止するに際して車両走行姿勢の安定化をより高い次元で実現することのできる車両の制御装置を提供すること。
【解決手段】アクセル操作及びブレーキ操作が同時になされている同時操作状態を検出したことを条件に機関出力をアクセル開度に基づく基準出力よりも低下させる出力抑制制御を実行する(ステップS21)とともに車両走行姿勢を安定化させる姿勢安定化制御を無効化する(ステップS22)。そして、アクセル操作及びブレーキ操作のうち少なくとも一方の操作が解除されることを条件に姿勢安定化制御の無効化を解除(ステップS24)してその後に出力抑制制御を停止する(ステップS25)。
(もっと読む)
車両用駆動装置
【課題】断接手段の信頼性を確保するとともに、過剰な締結力による消費エネルギーの増加を抑制することができる車両用駆動装置を提供する。
【解決手段】後輪駆動装置1は、車両の駆動力を発生する電動機電動機2A、2Bと、電動機2A、2Bと後輪LWr、RWrとの動力伝達経路上に設けられ、解放又は締結することにより電動機側と車輪側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、油圧ブレーキ60A、60Bの遮断状態と接続状態との切り替えと、接続状態における油圧ブレーキ60A、60Bの締結力を制御する制御装置8と、電動機2A、2Bと伝達経路との少なくとも一方に潤滑及び/又は冷却に供される液状流体を供給する電動オイルポンプ70と、を備える。電動機2A、2Bと遊星歯車式減速機12A、12Bの少なくとも一部が貯留した液状流体中に位置する。制御装置8は、液状流体の粘性又は粘性相関量に基づいて接続状態における油圧ブレーキ60A、60Bの締結力を制御する。
(もっと読む)
作業機
【課題】 本発明は、種々の条件に対応して原動機の駆動回転数を適正に設定し、良好な走行性能及び作業性能を得ることを課題とする。
【解決手段】 走行推進体と原動機を備える走行車体を設け、走行車体の後側に昇降リンク装置を介して作業部を昇降可能に設け、昇降リンク装置を昇降させる昇降用アクチュエータを設け、原動機は走行推進体と昇降用アクチュエータを駆動する構成とし、該昇降用アクチュエータを駆動させて作業部を昇降操作する昇降操作具を設けた作業機において、昇降用アクチュエータが作業部を上昇作動させるとき、走行推進体が停止する状態であれば原動機の駆動回転数を上昇用の設定回転数まで上昇させる構成とした。
(もっと読む)
エンジン排気浄化装置を備えたコンバイン
【課題】本発明は、コンバインの作業状態やディーゼルエンジンの負荷状態を監視しながらタイミング良く排気ガス浄化装置の再生駆動を行うようにすることが課題である。
【解決手段】コンバインに搭載したディーゼルエンジン16の排気ガスをDOC26とDPF27で浄化し、DPF27に設けた排気圧センサ42の排気詰まり検出によってDPF27を高温にして再生処理を行う排気浄化装置において、エンジンルーム温度センサ41かラジエータ水温センサ50或いは排気温度センサ43のどれかが所定の再生停止温度以上を検出すると、DPF27の再生処理を中断してラジエータ21の冷却ファン24を逆回転させてラジエータ21の目詰まり除去を行うよう制御したことを特徴とするコンバインのエンジン排気処理装置とする。
(もっと読む)
車両の制御装置
【課題】旋回性能向上制御を実行する場合に、エンジンの始動・停止に起因するドライバビリティの低下を回避して、車両の旋回性能を適切に向上させることができる車両の制御装置を提供すること。
【解決手段】少なくとも内燃機関を駆動力源として有し、旋回走行中に該駆動力源の出力によって発生させる駆動力もしくは制動力を補正することによりスタビリティファクタを目標値に追従するように変化させる旋回性能向上制御を実行する車両の制御装置において、前記旋回性能向上制御を実行する場合に、前記内燃機関の運転状態が停止から始動にもしくは燃焼運転から停止に切り替えられることがないように前記駆動力もしくは前記制動力を補正する駆動力補正手段(ステップS2〜S7)を設けた。
(もっと読む)
車両の走行制御装置
【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
(もっと読む)
出力制限制御装置、ハイブリッド自動車および出力制限制御方法、並びにプログラム
【課題】出力制限を行いながら運転者のドライバビリティを向上させること。
【解決手段】運転者の所定の操作に応じて出力制限を解除または復帰させ、この出力制限の解除または復帰には、それぞれ所定の解除レートまたは所定の復帰レートが設定可能である出力制限制御部を有するハイブリッド自動車を構成する。
(もっと読む)
走行作業機における運転操作装置
【課題】作業機器7を備えた走行作業機(トラクタ)1に,当該走行作業機における走行変速機構を変速操作する変速操作具13と,走行作業機に搭載したエンジン5の回転数を調節するアクセル操作具14とを備えて成る運転操作装置において,エンジン回転数の設定を容易にする。
【解決手段】前記走行作業機1に,前記アクセル操作具14を最大操作位置に操作したときにおけるエンジン回転数を調節して設定する設定手段16を備えている。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17及び前進アクセルペダル18)の操作量に応じて回転駆動され、ステアリングホイール16の操作量に応じて回転軸の角度が変更される車輪(前輪11a,11b及び後輪12)を備える車両であって、ペダルの操作量に基づいて目標とすべき車両の速度を算出する目標速度算出部38aと、車輪の回転軸の角度から車両の速度の制限値である車両速度制限値を設定する速度制限値設定部38bと、目標速度算出部38aの算出結果が車両速度制限値を超えている場合には、目標とすべき車両の速度を車両速度制限値に制限して車輪の回転駆動を制御するモータ制御部38cとを備える。
(もっと読む)
車両の旋回状態制御装置
【課題】車両特性が変化したときも所定の操舵応答を実現し続け得るよう、駆動力補正量を修正する技術を提供する。
【解決手段】演算部21は、モータトルク目標補正量ΔTmを求め、観測部22は、このΔTm、操舵角θ、車速V、車輪速Vw、横加速度Gyおよびヨーレートφをモニタし、これら観測値を、記憶部23へ格納する。演算部24は、記憶部23内の横加速度Gyが、目標横加速度tGyから乖離するとき、所定の操舵応答に対応したモータトルク必要補正量tΔTmおよびモータトルク目標補正量ΔTmから修正トルクゲインGain=(tΔTm/ΔTm)を求め、修正部26はモータトルク目標補正量ΔTmを、ΔTm×Gainにより修正し、目標モータトルク演算部28は、演算部27からの要求モータトルクrTmを修正後のモータトルク目標補正量(ΔTm←ΔTm×Gain)だけ補正して目標モータトルクtTmとなす。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
車両制御装置
【課題】 簡単かつ安価な構成でありながら、燃料消費の少ない経済的なエコランをきめ細かく円滑に実現することができる車両の制御装置を提供する。
【解決手段】 本発明は、車両の省燃費走行を実現するための車両制御装置であって、車両の省燃費走行を実現するエコラン制御を行う場合に、運転者の実際のアクセルペダル操作に基づく実アクセル開度を取得し、取得した実アクセル開度に制限を加えて、省燃費走行を実現するためのエコランアクセル開度を設定し、このエコランアクセル開度に従って、内燃機関の燃料供給制御を実行するものにおいて、エコラン制御実行中であっても、エコラン制御解除の条件が成立したときには、エコラン制御を解除することを特徴とする。
(もっと読む)
車両の駆動力制御装置
【課題】加速応答性の向上と旋回性能の向上とを両立させることのできる車両の駆動力制御装置を提供することを目的とする。
【解決手段】車両のスタビリティファクタを目標値に追従させて変化させるように駆動力を制御する車両の駆動力制御装置において、前記駆動力の増大要求に基づいて前記目標値を求める目標値設定手段(ブロックB1〜B4)と、その目標値設定手段で求められた前記目標値とスタビリティファクタの実際値とに基づいてスタビリティファクタの補正量を求める補正量算出手段(ブロックB5〜B8)と、その補正量算出手段で求められた前記差が小さくなるように前記駆動力を増大させる駆動力補正手段(ブロックB10〜B12)とを備えている。
(もっと読む)
車両の操舵時挙動改善装置
【課題】操舵時におけるヨーイング挙動の線形性およびロールの抑制を、サスペンション装置の変更なしに実現する。
【解決手段】モータ駆動トルクを操舵開始時t1から所定時間TM1sが経過するt2までの間、目標モータトルクよりも実線波形で示す量だけ増大された値に補正し、t2から所定時間TM2sが経過するt4までの間、目標モータトルクよりも実線波形で示す量だけ減少された値に制御する。t2〜t4間のモータトルク減少補正は車両のロール速度を速くする内外輪荷重変化を生じさせ、内外輪側ショックアブソーバ・ストローク速度VsaboutおよびVsabinが、モータトルク減少補正非実行時のVsabin'およびVsabout'よりも速くなる。これによりショックアブソーバの振動減衰力が大きくなり、当該期間においてロール角を小さくでき、操舵中の車体ロール感を改善することができる。
(もっと読む)
1 - 20 / 165
[ Back to top ]