
Fターム[3G384DA04]の内容
内燃機関の複合的制御 (199,785) | 目的 (24,795) | 制御精度の向上 (3,991)
Fターム[3G384DA04]の下位に属するFターム
応答性の改善 (1,073)
燃料、空気等流体の輸送遅れ (188)
ハンチング防止 (123)
電源電圧、電流変動(低下)対策 (156)
センサ精度向上、センサ取付位置 (580)
Fターム[3G384DA04]に分類される特許
1,861 - 1,871 / 1,871
内燃機関の空燃比制御装置

【課題】空燃比センサの出力特性のずれを補正し、空燃比フィードバック制御の精度を維持する。
【解決手段】機関1の排気ガスの成分に感応して出力値が変化する排気センサ9を備え、排気センサ9の出力値に対応して機関1に供給される混合気の空燃比を求め、空燃比を目標空燃比に近づけるようにフィードバック制御する空燃比フィードバック制御手段2を備えた内燃機関の空燃比制御装置2において、機関運転中に、燃料噴射量を所定の増減幅、所定の変動周期で変動させることによって空燃比を変動させる空燃比変動手段2と、空燃比が変動している間の排気センサ9の出力電圧の変位に基づいて、理論空燃比に対応する排気センサ出力電圧を補正する排気センサ出力電圧補正手段2と、を備える。
(もっと読む)
圧縮自着火式内燃機関の制御装置

【課題】 混合気を自着火燃焼させるシステムにおいて、着火遅れ期間のばらつきを抑制して自着火燃焼を安定化できるようにする。
【解決手段】 自着火燃焼モードでは、筒内の混合気を圧縮行程で高温・高圧状態にすることで自着火させて燃焼させる。この自着火燃焼モードで混合気を自着火させる際に、点火プラグを複数回点火する多重点火を実行して、その1回目の点火で補助エネルギを付与して自着火条件を成立させた後、着火遅れ期間τの吸熱反応Bに相当する時期又はその直前に、再び点火して補助エネルギを付与することで、吸熱反応Bを促進して吸熱反応Bのばらつきを抑制する。これにより、着火遅れ期間τのばらつきを抑制して、自着火燃焼を安定化させる。尚、エンジン運転状態や燃料供給量(空燃比)等に応じて着火遅れ期間変化するのに対応して多重点火の点火回数や点火時期を変化させるようにすると良い。
(もっと読む)
内燃機関の制御装置
【課題】 可変吸気機構の動作状態の検出結果の信頼性が低下している場合でも、実際の吸入空気量に応じて、空燃比制御および点火時期制御を適切に行うことができる内燃機関の制御装置を提供する。
【解決手段】 空燃比および点火時期を制御する制御装置1は、ECU2を備える。ECU2は、目標空燃比KCMDを算出し(ステップ22)、空燃比をフィードバック制御するための空燃比補正係数KSTRを算出し(ステップ2〜7)、空燃比指標値の統計処理値KAF_LSを算出し(ステップ82)、統計処理値KAF_LSに応じて、補正後バルブリフトLiftin_compおよび補正後カム位相Cain_compを算出し(ステップ81〜92)、補正後バルブリフトLiftin_comp、補正後カム位相Cain_compおよび空燃比補正係数KSTRに応じて、燃料噴射量TOUTを決定する(ステップ20〜25)。
(もっと読む)
クランク軸に同期したアナログ信号の検出
エンジン制御装置(110)の内部クロックによって自動車のクランク軸の角度位置を同期化することは、不正確かつコストがかかり、また例えば外部のセンサ信号を検出および処理する際に困難が生じることが多い。このため、本発明ではエンジン制御装置(110)が提案され、このエンジン制御装置ではまずクランク軸の角度位置が検出され、トリガ変換器(114)において電子的なトリガ信号(136)に変換される。この電子的なトリガ信号(136)によって、アナログ信号、例えばアナログのセンサ信号の検出およびアナログデジタル変換を制御する。ここでこの制御を行って、所定のトリガ信号が存在する場合にだけデータがそもそも検出されるかようにするか、またはデータは連続して検出されるが、所定のトリガ信号が存在する場合にだけこれらのデータが後続処理されるようにすることが可能である。  (もっと読む)
(もっと読む)
内燃機関のカムシャフトに配置された位相センサの改善された位相信号形成方法および形成装置
本発明は、内燃機関のカムシャフトの位相センサの改善された位相信号を形成する方法およびシステムに関する。  (もっと読む)
(もっと読む)
エンジン最適化方法および装置
車の内燃エンジンのエンジン管理装置は、車の調整機構を操作可能なマイクロプロセッサを具備する。車は、エンジンおよび調整機構により生成されるトルクを検知するトルクセンサを有し、トルクに関連するパラメトリック値を調整する。メモリ回路は、マイクロプロセッサにアクセス可能である。メモリ回路は、少なくとも一組のパラメトリック値を表すデータとパラメトリック値に対応するある範囲のトルク値とをセットで格納する。一組の命令は、トルクセンサからリアルタイムトルク値を周期的に取得し、取得されたトルク値が現在のパラメトリック値に対応する格納されたトルク値より高いなら、メモリを更新するようにマイクロプロセッサにより実行可能である。マイクロプロセッサは、取得されたトルク値が格納されたトルク値より低いなら、現在のパラメトリック値を調整する。 (もっと読む)
任意のパターンをもつカムおよびクランクシャフト信号に適用可能なエンジン・クランクシャフト位置の認識および追跡方法
クランクシャフト位置を表すデータを提供するための方法およびシステム。クランクシャフト信号の各立上りごとに、位置値および因子値が参照テーブルに記憶される。カム信号およびクランクシャフト信号を使用して、初期クランクシャフト位置を突き止める。この初期位置値を、参照テーブルへのポインタとして使用し、クランクシャフト信号の各立上りパルスとともに増加させる。参照テーブルからのデータを使用して、クランクシャフト位置をクランクシャフト信号値から、度の角度単位での所望の分解能まで外挿する。 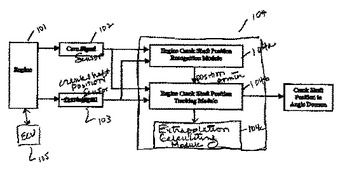 (もっと読む)
(もっと読む)
変調アルゴリズムを用いたプラントの制御装置
【課題】非線形特性の強いプラントに対して十分に非線形特性を補償し、また、制御量の変動が大きいプラントに対しても、追従性、安定性を満たす制御手法を提供する。
【解決手段】本発明は、変調アルゴリズムを用いたプラントの制御装置を提供する。この制御装置は、プラントの出力を目標値に制御するための仮制御入力を算出する手段と、仮制御入力を複数の成分に分割する手段と、複数の成分のうち少なくとも1つを変調する手段と、変調された成分と、他の成分を加算して制御入力を生成する手段と、を有する。これによって、従来の変調アルゴリズムによるプラントのフリクションやヒステリシスなどの非線形特性の補償能力を維持しつつ、変調による入力変動を最小化できる。このため、仮制御入力が大きく変化するようなプラントにおいても、出力が振動的になることを防止でき、制御性が向上する。
(もっと読む)
プロセス制御システム
本発明は、―送られてくる少なくとも一つのプロセス目標量から、少なくとも一つのプロセスアクチュエータの動作制御用の少なくとも一つのプロセス制御量を発生するように、前記少なくとも一つのプロセスアクチュエータの動作制御を行うための第1のプロセスモデルと、―前記少なくとも一つのプロセスアクチュエータの少なくとも一つのプロセス実制御量からプロセス実際量を発生する第2のプロセスモデルと、―比較用プロセス実際量を発生する更にもう一つのプロセス要素とを有しており、―前記第1プロセスモデルが、前記第2プロセスモデルの反転により写像可能であり、更にプロセス実際量と比較用プロセス実際量とから形成されるプロセス実際量の差が、コントロールユニットを中継して前記第1および第2プロセスモデルに送られるようになっている、少なくとも一つのプロセスアクチュエータの制御に用いられるプロセス制御システムに関する。本発明の課題は、そのようなシステムの精度を向上することにある。この課題は、前記プロセス要素がシミュレーション精度を向上した第3プロセスモデルとして構成されるとともに、少なくとも一つの非反転型プロセス構成部分を有することにより解決される。  (もっと読む)
(もっと読む)
駆動ユニットの運転方法および装置
【課題】回転速度設定のより快適な変換を可能にする、特に車両の駆動ユニットの運転方法および装置を提供する。
【解決手段】駆動ユニット(1)の少なくとも1つの出力変数に対して目標値が設定される、特に車両の駆動ユニット(1)の運転方法において、駆動ユニット(1)の少なくとも1つの運転状態において、さらに、駆動ユニット(1)の1つの運転変数に対して目標値が設定され、この運転状態において、駆動ユニット(1)の少なくとも1つの出力変数が、その目標値にかかわらず、運転変数実際値を運転変数目標値に近づけるように設定される。
(もっと読む)
クラッチ−独立動力取出装置の回転速度調整方法
クラッチ−独立動力取出装置(32)における回転速度を調整する方法である。動力取出装置(32)は、車両に設けられているエンジン(1)によって駆動される。エンジン(1)は自動ステージギア変速機(9)に自動車両クラッチ(3)を介して連結されている。変速機(9)、車両クラッチ(3)及びエンジン(1)を制御するために少なくとも一つの制御ユニット(45)が設けられている。制御ユニット(45)は、エンジン(1)の回転速度をスロットルレバー(61)の位置の関数として制御し、ギアセレクタ(46)の位置の関数として変速機(9)を制御する。動力取出装置(32)が係合され、ギアセレクタ(46)によってドライブポジションが選択されているときは、エンジン(1)の回転速度は、制御装置(60)によって制御され、車両クラッチ(3)の係合の程度はスロットルレバー(61)により制御される。動力取出装置(32)に係合している装置が制限位置に近づくと、エンジン(1)の回転速度は自動的に減速される。 (もっと読む)
1,861 - 1,871 / 1,871
[ Back to top ]