
Fターム[3G384FA59]の内容
内燃機関の複合的制御 (199,785) | 入力パラメータ、センサ (66,899) | クランク角 (5,107) | 基準クランク角 (406)
Fターム[3G384FA59]に分類される特許
1 - 20 / 406
気筒間空燃比ばらつき異常検出装置
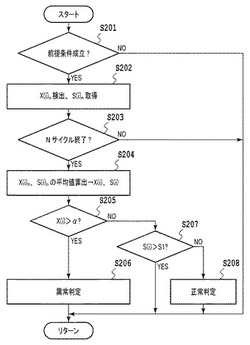
【課題】誤判定を防止して十分な検出精度を確保する。
【課題手段】本発明に係る気筒間空燃比ばらつき異常検出装置は、多気筒内燃機関における各気筒の吸気弁の作用角を可変にする作用角可変機構と、各気筒の回転変動に関するパラメータX(i)を検出し、この検出されたパラメータに基づき気筒間空燃比ばらつき異常の有無を検出する異常検出手段とを備える。異常検出手段は、パラメータの検出時における作用角Sが所定の大作用角領域にあるとき(ステップS207:イエス)には正常判定を保留し、パラメータの検出時における作用角が、大作用角領域よりも小作用角側の所定の小作用角領域にあるとき(ステップS207:ノー)には正常判定(ステップS208)を実行可能である。
(もっと読む)
エンジン制御装置

【課題】クランク信号にノイズが重畳すること等により欠歯が誤検出された場合でも、次の欠歯位置まで待つことなく正常復帰すること。
【解決手段】クランク信号のエッジ間隔を計測するエッジ検出部と、角度クロックを生成する角度クロック生成部と、クランク信号のエッジ間隔に基づいて、欠歯を検出した場合に、その後のクランク信号のエッジ間隔に基づいて、該欠歯検出が正常な検出か誤検出かを判断する欠歯検出部と、角度クロックに基づいて動作し、欠歯検出部により欠歯が検出された場合にリセットする第1角度カウンタと、角度クロックに基づいて動作し、欠歯検出部により欠歯検出が正常な検出と判断された場合に、第1角度カウンタの値をロードする第2角度カウンタとを備え、第1角度カウンタは、欠歯検出部により欠歯検出が誤検出であると判断された場合に、第2角度カウンタの値をロードする。
(もっと読む)
エンジン制御装置
【課題】エンジンの噴射/点火を司るマイコン回路の異常を少オーバヘッドとなる方式で検出すること。
【解決手段】本発明によるエンジン制御装置1は、クランク信号のエッジ間隔に基づいて、逓倍の角度クロックを生成する角度クロック生成部と、角度クロックに基づいて動作し、欠歯検出タイミングでリセットする角度カウンタと、欠歯検出タイミングでの角度カウンタのカウンタ値であって、リセットされる前のカウンタ値が、所定範囲内にないとき、角度カウンタのカウンタ値の異常を検出する監視部とを含む。
(もっと読む)
筒内圧推定装置
【課題】筒内圧センサでは検出が困難な筒内圧の値を推定することができる筒内圧推定装置を提供する。
【解決手段】ECU60は、エンジン10の膨張行程における筒内圧であるPθと、当該筒内圧の時の筒内容積であるVθと、ピストン上死点の筒内容積であるVTDCと、比熱比であるκと、κ=(logPθ−logP0)/(logVθ−logVTDC)で定まる関係と、に基づいて基準筒内圧であるP0を算出する。ECU60は、エンジン10のピーク筒内圧に応じたクランク角であるピーククランク角を取得する。ECU60は、算出したP0と、取得したピーククランク角が上死点から離れるほど小さな値となるように定めた補正係数αと、に基づいて筒内圧の推定値を求める。
(もっと読む)
車両制御システム及び車両制御装置
【課題】クランク角センサの信号を入力する入力回路をエンジン制御に係る処理を実行する電子制御装置の夫々に設けなくても良くする。
【解決手段】エンジン制御を、通信を伴う複数の電子制御装置の協働により実現するシステムにおいて、メインの電子制御装置は、クランク信号の入力回路を備える一方、サブの電子制御装置は、当該入力回路に代替する回路として、通信線を通じてメインの電子制御装置から送信されてくる特殊な差動信号に基づきクランク信号の擬似信号である通信クランク信号を生成する回路を有する。メインの電子制御装置は、クランク信号がアクティブになる度、特殊な差動信号を通信線に入力する。サブの電子制御装置は、この特殊な差動信号の入力パターンに合わせて、信号レベルがハイ/ロウに変化する通信クランク信号を生成し、この信号に基づきクランク角の変化に合わせたエンジン制御に係る処理(NE同期処理)を実行する。
(もっと読む)
内燃機関の制御装置
【課題】本発明は、内燃機関の制御装置に関し、クランク角検出手段により検出されるクランク角とクランク角との間のクランク角においてもパラメータを精度良く取得することを目的とする。
【解決手段】本発明の内燃機関の制御装置は、第1のクランク角とその次に検出される第2のクランク角との間であって、クランク角検出手段のクランク角間隔に所定比率を乗じた角度だけ第1のクランク角より後にある中間クランク角でパラメータを取得しようとする場合に、前回のクランク角検出間隔時間に所定比率を乗じた時間だけ第1のクランク角検出タイミングより後にある第1のタイミングでパラメータを取得し、第1のクランク角と第2のクランク角との間の間隔時間に所定比率を乗じた時間だけ第1のクランク角の検出タイミングより後にある第2のタイミングと、第1のタイミングとのズレ時間に基づいて、第1のタイミングで取得されたパラメータに関する補正を行う。
(もっと読む)
内燃機関の電子制御システム
【課題】この発明は、システム構成を簡略化しつつ、複数の制御装置間でクランク位置の算出値を確実かつ容易に同期させることを目的とする。
【解決手段】エンジン制御用マイコン10は、クランク角センサから入力されるNE信号に基いて現在のクランク位置を算出し、現在のクランク位置をエッジ時間Anに変換する。また、マイコン10は、NE信号の入力時刻とエッジ時間Anとの加算値に対応するエッジ出力時刻を算出し、エッジ出力時刻の到来時にCPS制御用マイコン20にエッジ信号を出力する。一方、マイコン20は、NE信号の入力時刻とエッジ信号の入力時刻との差分に基いてエッジ時間Anを算出し、エッジ時間Anから現在のクランク位置を算出する。これにより、専用のシリアル通信線や通信開始信号等を使用しなくても、マイコン10,20間で現在のクランク位置を同期させることができる。
(もっと読む)
エンジン制御装置
【課題】バルブタイミング調整装置を用いたエンジンに適用され、クランク角信号の異常時に、カム角信号に基づいてエンジン回転位置を判定するエンジン制御装置を提供する。
【解決手段】エンジン制御装置は、クランク角信号が異常であり(S400:Yes)、クランク軸に対してカム軸が進角している場合(S404:No)、カム軸が最値遅角位置に向けて回転するようにバルブタイミング調整装置を遅角制御する(S406)。エンジン制御装置は、疑似クランク角信号の信号間隔(30°CA)に対する今回推定進角量の余りを考慮して、初回の疑似クランク角信号の生成タイミングをタイマに設定し(S412)、気筒位置情報を更新し(S414〜S418)、今回推定進角量の余りを除いて今回と次回とのカム角信号間隔を推定する(S422)。エンジン制御装置は、推定カム角信号間隔の間、30°CA毎に疑似クランク角信号を生成する。
(もっと読む)
エンジン制御装置
【課題】カム角信号が各気筒に対応した所定の角度位置で発生する構成において、クランク角信号が異常の場合にエンジンを始動できるエンジン制御装置を提供する。
【解決手段】エンジン始動時からクランク角信号が異常の場合(S410:Yes、S418:No)、エンジン制御装置は、前回気筒推定位置を+1して今回気筒推定位置とする(S420)。エンジン始動後に最初にカム角信号を検出する場合、エンジン停止時の気筒位置を前回気筒推定位置とする。エンジン制御装置は、2回目のカム角信号を検出してからは(S424:No)、カム角信号の時間間隔に基づいて生成される疑似クランク角信号と今回気筒推定位置とカム角信号とに基づいて燃料の噴射、点火処理を実行し(S436、S438)、3回目以降のカム角信号を検出し前回噴射燃料が正常燃焼していない場合(S422:No、S430:No)、今回気筒推定位置をずらす(S434)。
(もっと読む)
単気筒エンジンの行程判別装置
【課題】カムセンサを要することなく迅速な行程判別を可能にした単気筒エンジンの行程判別装置を提供する。
【解決手段】始動モータを正転駆動させる前に逆転駆動させる制御手段S11と、前記正転駆動によりピストンに圧縮行程を乗り越えさせてエンジン始動させる正転制御手段S18と、を備え、制御手段は、ピストンが圧縮行程を乗り越えられず且つ排気行程を乗り越えられる大きさに設定された駆動トルクで、始動モータを逆転駆動させる。そして、逆転駆動により基準位置から所定回転角以上回転させてもクランク軸の回転停止が生じなければ圧縮行程の逆側(排気行程の側)にあると判別する排気行程判別手段(S16)と、逆転駆動により基準位置から所定回転角を回転させるまでにクランク軸が回転停止した場合には圧縮行程の側にあると判別する圧縮行程判別手段(S19)と、を備える。
(もっと読む)
エンジン制御装置
【課題】エンジン回転位置を誤設定する可能性を低減し、基準位置信号およびカム角信号の異常を検出できるエンジン制御装置を提供する。
【解決手段】エンジン制御装置は、気筒判別が完了している場合(S400:Yes)、今回の基準位置信号とカム角信号とが所定の組合せではないか(S404:No)、今回検出した組合せと前回の組合せから今回期待される組合せとが一致しない場合(S410:No)、正常カウンタを0に設定し、今回の組合せが所定の組合せであり(S404:Yes)、かつ期待される組合せと一致する場合(S410:Yes)、正常カウンタをインクリメントする。エンジン制御装置は、正常カウンタが所定回数以上であれば(S414:Yes)、今回検出した組合せに基づいて回転位置カウンタの値を設定し(S416)、正常カウンタが所定回数未満であれば(S414:No)、回転位置カウンタの値を設定しない。
(もっと読む)
エンジン及びエンジン作業機
【課題】
混合気を確実に遮断することによりエンジンの過回転を防止することができるリードバルブを備えたエンジンを提供する。
【解決手段】
気化器と、ピストンが往復運動する空間に開口する吸気開口を有し、気化器から供給される混合気をクランクケースに設けられたクランク室に供給する吸気ポートが形成されるシリンダブロックと、気化器とシリンダブロックとの間に設けられ、吸気ポートと気化器とを連通する吸気通路を有するインシュレータ19を有するエンジンにおいて、インシュレータに、磁性材料により製造されるリードバルブ21と、2つの磁極片25b、25cを有する鉄心と、鉄心の一部に巻かれたコイル26を有する電磁石27を組み込んだ(鋳込むようにした)。電磁石27は制御部によって制御され、通電することによってリードバルブ21を閉状態に保つことができるようにした。
(もっと読む)
エンジン制御装置
【課題】簡便に電磁ピックアップ式のクランク軸センサの遅れ補償を行うことが可能なエンジン制御装置を提供すること。
【解決手段】電磁ピックアップ式のクランク軸センサ11により出力されるNE信号にどの程度の遅れが生じるかを、そのクランク軸センサ11が実際に装着されるエンジンが回転したときのNE信号及び燃焼圧信号から求め、その遅れに応じた補正角度を算出して記憶する。このように、補正角度の算出及び記憶は、エンジン制御装置において自動的に行われるので、簡便に電磁ピックアップ式のクランク軸センサ11の遅れ補償を行うことができる。
(もっと読む)
内燃機関の制御装置
【課題】内燃機関におけるクランク角速度を好適に検出する。
【解決手段】内燃機関の制御装置(100)は、内燃機関(200)のクランク軸(204)の角速度を、複数の気筒(201)の各々について夫々検出する角速度検出手段(110)と、検出された角速度の出力値のうち、一の気筒における特定サンプリング位置の値と、他の気筒における特定サンプリング位置の値との乖離量を算出する乖離量算出手段(120)と、他の気筒における特定サンプリング位置の値から、算出された乖離量を減算する減算手段(130)と、減算された出力値に対してフィルタ処理を行うフィルタ処理手段(140)とを備える。
(もっと読む)
内燃機関自動停止再始動制御装置
【課題】内燃機関の基準信号の誤認識を防止し、内燃機関の良好な再始動性を確保することできる内燃機関自動停止再始動制御装置を提供する。
【解決手段】
この発明による内燃機関自動停止再始動制御装置は、内燃機関の自動停止後に於ける惰性回転中に、内燃機関を始動させる始動装置のソレノイドを駆動してピニオンギアを軸方向へ移動させてリングギアへの押し付けを開始し、押し付けの開始後、所定期間を経過するまではクランク角度信号による基準信号の検出を禁止して内燃機関の基準信号の誤認識を防止し、内燃機関の良好な再始動性を確保するようにしたものである。
(もっと読む)
内燃機関の判定装置
【課題】複数の気筒間での空燃比のばらつきを判定する場合において、良好な判定精度を確保しながら、製造コストを削減することができる内燃機関の判定装置を提供する。
【解決手段】内燃機関3の判定装置1は、ECU2を備える。ECU2は、式(1)〜(11)を用いて、出力値SVO2が所定の下流側目標値VVO2_TRGTに収束するように、目標当量比KCMDを算出し(ステップ2〜11)、式(13)〜(18)を用いて、検出当量比KACTが目標当量比KCMDに収束するように、気筒#1〜#4に供給される混合気の空燃比を制御し(ステップ32)、排気還流率REGRを、値0と所定の強制オン用値R_ONとの間で切り換えて制御し(ステップ45,50〜65)、適応則入力偏差DUADP(=|UADP_EGRON|-|UADP_EGROFF|)に基づき、複数の気筒間で空燃比のばらつきが発生しているか否かを判定する(ステップ70〜83)。
(もっと読む)
内燃機関の可変動弁装置及び内燃機関の始動制御装置
【課題】始動時の筒内コンプレッションのばらつきを抑制すると共に、吸気弁の閉時期の変換角を過度に大きくする必要のない可変動弁装置を提供する。
【解決手段】ステップ11で、排気VEL1と吸気VTC3によって吸排気弁のそれぞれの開閉時期を、EO1、EC1、IO1、IC1に予め保持し、ステップ12で、自立燃焼による始動条件であると判断した場合は、ステップ13で、ピストンの停止位置を検出する。ステップ14で、圧縮行程の気筒がBDC後のθp±Δθの範囲内と判断した場合は、ステップ15で、排気VEL1と吸気VTC3に、前述の開閉時期にそれぞれ変換する制御信号を出力する。ステップ16で、膨張行程の気筒に燃料噴射と点火制御を行って自立燃焼始動を開始し、ステップ21では、制御マップに基づいて通常制御を行う。
(もっと読む)
回転角度計測方法、回転角度計測装置、エンジンバルブ制御方法、およびエンジンバルブ制御装置
【課題】 本発明は、ロータリエンコーダ等、回転軸が一定回転角度回転するごとにパルス信号を出力するセンサから出力されるパルス信号に基づいて回転軸の回転角度を計測する回転角度計測方法等に関し、回転軸の回転角度を高精度に計測する。
【解決手段】 回転軸の回転速度を模擬した模擬データを取得し、その模擬データに基づいて、回転軸が一定角度回転するごとに出力されるパルス信号間の時間間隔を表わす時間データを算出し、その時間データに応じた計測遅れ角度を表わす遅れ角度データを算出することにより、回転速度と計測遅れ角度との対応関係を作成しておき、実際の計測において、回転軸の回転に伴うパルス信号から回転角度を算出し、その算出された回転速度を上記の対応関係に基づいて補正する。
(もっと読む)
内燃機関の空燃比制御装置
【課題】 空燃比センサの出力が一定期間停滞する停滞故障を正確に判定することができ、且つ比較的高い頻度で故障判定を実行することができる内燃機関の空燃比制御装置を提供する。
【解決手段】 空燃比を設定振動周期で振動させる空燃比振動制御が行われ、空燃比振動制御実行中に、空燃比センサの出力から算出される検出当量比KACTの変化量検出期間当たりの変化量が検出当量比変化量DKACTとして算出される。検出当量比変化量DKACTと変化量閾値xLSBとが比較され、その比較の結果が所定の条件を満たすときに増分値RTADDを積算することにより故障判定パラメータRTが算出される。算出された故障判定パラメータRTを停滞故障判定閾値RTTHと比較し、その比較結果に応じて停滞故障が発生しているか否かが判定される。
(もっと読む)
内燃機関
【課題】 負荷が急変する過渡時の負荷変化や、燃料カット時の負荷変化が生じても、空燃比を的確に制御する。
【解決手段】 負荷変化が検出された場合(ステップS33)、負荷が急変する過渡時の負荷変化であれば、負荷が急変している際に吸気行程で、燃料噴射期間の中心位置が吸気バルブの閉動作以前に位置するように燃料を噴射し(ステップS32)、燃料カット時の負荷変化であれば、燃料カットが行われる前及び燃料カットからの復帰時に吸気行程で、燃料噴射期間の中心位置が吸気バルブの閉動作以前に位置するように燃料を噴射し、新たに付着する燃料量を考慮せずに、燃料供給量を容易に算出する。
(もっと読む)
1 - 20 / 406
[ Back to top ]