
Fターム[3H020EA01]の内容
非容積形ポンプの制御 (2,618) | 制御系各部の構成 (625) | 信号検出部 (232)
Fターム[3H020EA01]の下位に属するFターム
Fターム[3H020EA01]に分類される特許
1 - 20 / 46
冷温水循環送水系ポンプシステム
【課題】複数の可変速駆動手段によって駆動する複数のポンプを用いた給水装置において給水ユニット要求仕様(水量Q0、全揚程H0)の1点でポンプ運転制御、末端圧力一定制御に必要なパラメータ及び演算式を自動生成するのに好適な可変速ポンプを用いた冷温水循環送水系ポンプシステムを提供する。
【解決手段】可変速駆動手段によって駆動される複数の可変速ポンプ及び給水管と、給水管に取り付けた圧力検出手段と、給水系の所望する圧力目標値を設定する手段と、圧力目標値に従いポンプが予め定めた関係となるように可変速運転する手段とを備えた冷温水循環送水系ポンプシステムにおいて、入力された給水ユニット要求仕様データを基に、末端圧力一定制御の演算式を自動生成する手段と、生成した演算式を記憶する手段とを有する。入力された給水ユニット要求仕様データを基に、末端圧力一定制御に必要なパラメータを自動生成する手段と、生成したパラメータを記憶する手段とを有する。
(もっと読む)
ポンプ駆動制御装置

【課題】直流駆動の循環ポンプを利用した水の有無検知を正確に行えるようにしたポンプ駆動制御装置に関するものである。
【解決手段】温水を循環させる直流駆動の循環ポンプ14と、該循環ポンプ14の駆動を制御する制御部21と、この制御部21には循環ポンプ14に所定の速度指令電圧を印加する速度指令電圧部22と、前記速度指令電圧部22から速度指令電圧が印加された後の循環ポンプ14の回転数を検知する回転数検知部23とを備えたもので、前記制御部21は速度指令電圧部22から所定の第1速度指令電圧PV1と、この第1速度指令電圧PV1より高い第2速度指令電圧PV2を循環ポンプ14に印加し、回転数検知部23でこの時の回転数を検知して、この2回の回転数の差分を予め記憶した既定値P1と比較して、既定値P1以上の場合は空運転と判断して駆動禁止し、既定値P1未満の場合は水流有りと判断して駆動可能とする状況判定運転を行う。
(もっと読む)
水中ポンプの制御ユニット、及び水中ポンプの制御盤
【課題】温湿度環境の影響が大きな屋外に設置される場合であっても、既存の制御盤設備を有効利用して更新設備に要するコストを低減することができる水中ポンプの制御ユニットを提供する。
【解決手段】水中ポンプと電気的に接続する端子を含む複数の端子を備えた端子台22と、端子台22を介して接続された水中ポンプへの通電状態を切り替えるスイッチ回路23と、スイッチ回路23を制御する電子回路24と、それらを収容するユニット筺体21とを備えて構成され、ユニット筺体は、通風機構19を備えた既設の制御盤筺体10に備えた支持板12から既設の回路部品を除去した後に、支持板12との間に間隙を形成するようにユニット筺体21を取り付ける取付部25を備えるとともに、下部と上縁部にそれぞれ開口が形成されている。
(もっと読む)
ポンプ動力算出装置
【課題】任意の運転点を示すポンプ特性値に基づき、その運転点でポンプを運転した場合に必要となる軸動力や消費電力を算出する。
【解決手段】基準流量算出部16Aにより、データ取得部11で取得した入力特性値2に基づいて基準運転点R0における基準流量Q0を算出し、基準軸動力算出部16Bにより、基準流量算出部16Aで算出された基準流量Q0に基づいて基準動力点P0におけるポンプの基準軸動力E0を算出し、動力算出部16Cにより、基準流量算出部16Aで算出された基準流量Q0および基準軸動力算出部16Bで算出された基準軸動力E0と記憶部15の制御時軸動力曲線関数形状式とに基づいて制御時軸動力曲線B1を特定し、制御時流量Q1と制御時軸動力曲線B1とから制御時動力点P1における制御時軸動力E1をポンプ動力値3として算出する。
(もっと読む)
ポンプ制御装置およびポンプ装置
【課題】ポンプ装置の制御を簡素化しつつ、低流量時のポンプ装置の目標流量に対する実際の流量の変動率を低減することが可能なポンプ制御装置を提供する。
【解決手段】ポンプ制御装置15は、DCブラシレスモータ3を駆動源として有するとともにDCブラシレスモータ3の回転速度の増減に応じて流量が増減するポンプ装置のDCブラシレスモータ3を制御する。このポンプ制御装置15は、ポンプ装置の目標流量に応じて決まるDCブラシレスモータ3の速度制御信号のレベルが所定の基準値よりも高いときに、オープンループ制御でDCブラシレスモータ3を制御し、速度制御信号のレベルが基準値よりも低いときに、DCブラシレスモータ3の実際の回転速度である実回転速度の測定結果に基づくクローズドループ制御でDCブラシレスモータ3を制御する。
(もっと読む)
負荷制御装置及び負荷制御方法
【課題】運転モードが手動モードから自動モードに切り替えられた際に不具合が発生することを抑制すること。
【解決手段】台数制御部14が、運転モードが手動モードから自動モードに切り替えられた場合、吸水ポンプP1〜P16の現在の運転台数が所定範囲内にあるか否かを判別し、判別結果に基づいて吸水ポンプP1〜P16の運転台数を制御する。このような制御によれば、運転モードが手動モードから自動モードに切り替えられた際、手動モードにおける吸水ポンプP1〜P16の運転台数が自動モードにおける吸水ポンプP1〜P16の運転台数の制御範囲外にあることによって、不具合が発生することを抑制できる。
(もっと読む)
モータ及びそれを備えたポンプ
【課題】スイッチング素子への負担を軽減すると共に、消費電力を低減したモータ及びそれを備えるポンプを提供する。
【解決手段】この課題を解決するために、ロータ2及びロータ2を駆動するステータ3と、外部から電力が供給されステータ3への通電を行うスイッチング素子4と、外部からの指令信号10でスイッチング素子4を制御する制御信号11を出力する制御部5と、を備えると共に、制御部5に外部から供給される電源電圧及び制御部5のレギュレータ電圧14がスイッチング素子4に供給される電力の電圧より低いモータ1及びそのモータ1を駆動源とするポンプ20であって、制御部5のレギュレータ電圧14と電源電圧の少なくとも一方を検出する電圧検出部6と、電圧検出部6の電圧検出時に制御信号11の伝達を許可する信号伝達許可手段7と、を有する。
(もっと読む)
給水ポンプ制御装置および給水ポンプ制御方法
【課題】 災害により給水設備および消火設備において漏水が発生した場合に、給水設備等に貯留された水道水の漏出を低減することができる給水ポンプ制御装置および給水ポンプ制御方法を提供すること。
【解決手段】 本発明の給水ポンプ制御装置は、受水槽に貯留される水道水を高置水槽へ供給する給水ポンプを制御するものであって、高置水槽122内に設置されるセンサ154からの入力に応じて給水ポンプ114の運転を制御する運転制御手段132と、給水ポンプ114の稼働情報を時間情報と関連付けて稼働実績データとして記録する記録手段134と、稼働実績データを分析し、給水ポンプ114の負荷量について漏水発生を示唆する閾値を含む停止条件を演算する演算手段138と、停止条件に合致するかを判定し、合致した場合には、運転制御手段132による制御にかかわらず、給水ポンプ114の動作を停止させる停止判定手段140とを含む。
(もっと読む)
キャビテーション壊食量予測方法及び予測装置
【課題】簡単にキャビテーション壊食量を予測することが可能な流体機械のキャビテーション壊食量の予測方法及び予測装置を構築する。
【解決手段】流体機械に振動加速度センサを取りつけ、振動加速度センサにより計測された振動加速度の値からキャビテーションの気泡崩壊による衝撃圧を算出し、このキャビテーションの気泡崩壊による衝撃圧から流体機械に生じているキャビテーション強さを算出し、キャビテーション強さからキャビテーション衝撃力をパラメータにしたキャビテーションエネルギー分布を推定し、このエネルギー分布の中で流体機械の材料に壊食を生じさせるしきい値以上のキャビテーションエネルギーの総和を算出し、キャビテーションエネルギーの総和と、予め求めた最大壊食速度の関係から流体機械における最大壊食速度を算出し、この最大壊食速度と流体機械の運転時間とからキャビテーションによる最大壊食量を予測する。
(もっと読む)
作業機械の運転点を判定する方法および装置
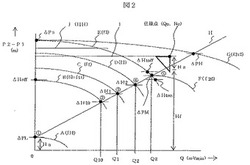
本発明は、作業機械および/またはこれを駆動する非同期電動機の運転点を判定する方法および装置であって、前記作業機械によって消費される動力および/または前記作業機械の吐出し流量が前記運転点を特徴付け、前記作業機械の運転点に依存した単数または複数の測定量が単数または複数のセンサによって把握され、測定値が前記作業機械の運転中に評価および/または記憶されるものに関する。機械的測定量の圧力、差圧、力、振動、固体伝播音または空気伝播音から信号分析、特に周波数分析によって、前記作業機械の回転音響に線形に比例した周波数を求めることによって、前記運転点は駆動する前記非同期電動機の電気的測定量を用いることなく判定される。前記周波数から前記作業機械の回転数(n)が求められ、前記回転数から、前記非同期電動機(52)の滑りに起因した回転数‐トルク依存性(M(n))を利用して、前記作業機械によって消費された動力(P2)および/またはその吐出し流量(Q)によって特徴付けられた前記運転点が判定される。 (もっと読む)
ポンプ装置
【課題】人工心臓の血液ポンプとして、左心血液ポンプと右心血液ポンプの各吐出量を簡単に制御が可能なポンプ装置を提供する。
【解決手段】ステータ4の上方の上部ロータ5aと下方の下部ロータ5bとを該ステータ4の中心透孔4aに嵌挿した回転軸6により連結し、前記上部ロータ5aの下面の永久磁石7aに対して前記ステータ4の上面の第1電磁石手段8aにより軸方向の作用力を発生させると共に、前記下部ロータ5bの上面の永久磁石7bに対して前記ステータ4の下面の第2電磁石手段8bが作用して前記下部ロータ5bが回転駆動し、前記上部ロータ5aの上面の第1インペラ2aにより第1ポンプ手段2として作用すると共に、前記下部ロータ5bの下面の第2インペラ3aにより第2ポンプ手段3として作用する。
(もっと読む)
ポンプ装置およびポンプの振動傾向の管理方法
【課題】ポンプの振動傾向を正確に管理することができるポンプ装置および方法を提供する。
【解決手段】本発明は、吸込水槽内の液体を汲み上げるポンプ装置に関する。このポンプ装置は、回転軸6、該回転軸6に固定された羽根車10、および回転軸6を回転自在に支持する軸受12,15を有するポンプと、吸込水槽40の液面位置を計測する液面計30と、ポンプの振動を計測する振動計測器34と、振動計測器34の計測値を記録する記録装置45と、記録装置45による振動計測器34の計測値の記録を開始および停止させる記録制御部46とを備えている。記録制御部46は、ポンプの吐出流量および吸込水槽40の液面位置がそれぞれ所定の範囲内にあるときに、記録装置45に計測値を記録させる。
(もっと読む)
ポンプ装置
【課題】汎用のポンプ装置において、簡易にキャビテーション発生による極端な揚水量低下を防止できるポンプ装置を提供することを目的とする。
【解決手段】キャビテーション発生特有のモータ回転速度Nmとポンプ運転電流値Imの特性から時点T5で検知するとともに、さらに、モータ回転速度Nmの増加時の圧力タンクの圧力Pの上昇、または、モータ回転速度Nmの減少時の圧力タンクの圧力Pの低下を確認できないときに(時点T5’)、キャビテーションが確実に発生していると判定し、ここでモータ回転速度を変速させ、キャビテーション発生を抑制する。
(もっと読む)
羽根車の作動状態指標を決定するためのシステムおよび方法
システムは、羽根車(100a〜100h)の1つまたは複数の特性を測定するように構成された複数のセンサ(422〜424)を含む。このシステムは、羽根車の少なくとも1つの段階に関連する入力信号をセンサから受け取るように構成された複数のセンサインターフェース(420)を備える羽根車の状態指標デバイス(400)も含む。羽根車の状態指標デバイスは、入力信号を使用して羽根車の故障を特定するように構成されたプロセッサ(440)、および故障を特定する指標を提供するように構成された出力インターフェース(470)も含む。プロセッサは、羽根車の少なくとも1つの故障モードに関連する周波数群(520)を決定し、周波数群を使用して入力信号を分解し、分解した入力信号を使用して羽根車信号を復元し、復元した羽根車信号をベースライン信号(430)と比較することによって、故障を特定するように構成される。周波数群は、羽根通過周波数、およびその高調波を含む。  (もっと読む)
(もっと読む)
血液ポンプの流量推定方法
【課題】血液ポンプ特性の個体差によって流量推定結果の精度が劣化するのを効果的に抑制することができる血液ポンプの流量推定方法を提供する。
【解決手段】複数の血液ポンプを準備し、これら複数の血液ポンプのそれぞれを用いて補正項を含む一般流量推定式を作成するステップ及び患者の体内に埋め込んだ血液ポンプ実機を用いて得られる測定データを補正項に代入して一般流量推定式から血液ポンプ実機における流量推定式を作成するステップを含む第1のステップと、
患者の体内に埋め込んだ血液ポンプ実機におけるモータの回転数N及びモータの消費電流I並びに患者の血液の属性データZを測定し、血液ポンプ実機における流量推定式とこれらの値N,I,Zとに基づいて、血液ポンプの流量Qを推定する第2のステップとを含むことを特徴とする血液ポンプの流量推定方法。
(もっと読む)
水処理装置
【課題】排水用のポンプを停止するタイミングを適正に制御して安全かつ確実に排水処理を行う。
【解決手段】本発明の水処理装置は、雨水を貯留する雨水貯槽2と、この雨水貯槽2内に設けられ、溜まった雨水を排水処理場に排水する排水ポンプ11と、この排水ポンプ11の駆動を制御する制御ユニット20とを備えている。制御ユニット20は、上記排水ポンプ11の駆動中にその駆動電流Aを取得し(S17)、あらかじめ設定された所定値(A0×α)以下まで上記駆動電流Aが低下した時点で上記排水ポンプ11を停止する(S18,S22)。
(もっと読む)
センサ回路及び高圧水噴射装置
【課題】渇水を検知する回路において、泥水などが使用された場合、従来における、渇水とは別の要因によりモータ電流値が変動する点、導体と先端部との間に異物が詰まると導通する点、また、異物の混濁による水質変化で比誘電率が変化する点、を解消して正確に渇水を検知する。
【解決手段】容器内に露出した内極7Aから、一端が内極抵抗R1を介して電源に接続されると共に他端が外極抵抗R2を介して接地され、内極抵抗R1と外極抵抗R2の分圧出力を比較器7Bに接続するようにした。
【効果】水質により外極抵抗R2が変動しても、内極抵抗R1によって、外極抵抗R2の変動範囲内において渇水か否かを検知するので、誤検知が防止される。
(もっと読む)
ポンプ流量推定システムおよびポンプ流量推定方法
【課題】本発明は、吐出圧力一定制御、あるいは、推定末端圧力一定制御によって制御されている可変電圧、可変周波数電源で駆動される可変速ポンプの流量を、駆動電動機の電流と速度、並びに、ポンプの正味発生圧力によって推定するポンプ流量推定システムおよびポンプ流量推定方法に関するものである。
【解決手段】本発明は、可変電圧・可変周波数電源で駆動されている電動機の一次電流を測定し、前記測定された一次電流から、予め設定した励磁電流をベクトル的に引き算して、電動機の二次電流を求め、電動機トルク係数を乗じて電動機のトルク推定し、更に、この推定したトルクに、電動機速度を乗じて電動機の出力を演算する。前記演算した電動機出力は、ポンプの軸動力に等しいと云う原理を適用し、ポンプ圧力を測定し、ポンプ効率を既知として、ポンプの流量を演算推定する。
(もっと読む)
水中ポンプ用制御盤及びその制御方法
【課題】複数の機種があったり、異なる状況の設置現場に設置される水中ポンプであっても、高い精度で空運転を防止できる水中ポンプ用制御盤及びその制御方法を提供すること。
【解決手段】水中ポンプ130を据え付けた据付現地にて水中ポンプ130の締切運転を行った際の締切運転電流値を測定する締切運転電流値測定手段(電流検出器51等)と、締切運転電流値を所定の減少率(0〜5%)低減して求めた空運転判断基準電流値を入力して設定する空運転判断基準電流値入力設定手段(表示兼操作部20や記憶手段55)と、水中ポンプ130運転時の電流値を測定してその電流値が空運転判断基準電流値になったときに水中ポンプ130への電力供給を停止するポンプ停止手段(電流検出器51や記憶手段55や比較器57やスイッチ手段53)とを具備する水中ポンプ用制御盤10である。
(もっと読む)
ポンプ装置
【課題】サイズが異なる多くの羽根車を準備すること無く、要求される吐出し量に適切に対応でき、しかも既存の制御盤を有効に利用することができるノンクロッグ式の羽根車を備えた水中ポンプ装置を提供する。
【解決手段】商用交流電源ACに電力線SLを介して接続されたインバータ制御回路50と、前記インバータ制御回路50によって駆動されるノンクロッグ式の水中ポンプとを備え、前記インバータ制御回路50が収容されたケーシング40が、ポンプケーシング21またはポンプケーシング21近傍に取り付けられた水中ポンプ装置1であって、前記インバータ制御回路50に前記水中ポンプの回転数を初期調整する調整回路55を設ける。
(もっと読む)
1 - 20 / 46
[ Back to top ]