
Fターム[3J057GA66]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御の目的 (2,601) | クラッチの性能向上 (545) | クラッチの係合ショック低減 (231)
Fターム[3J057GA66]の下位に属するFターム
係合開始タイミングの調整又は同期 (93)
Fターム[3J057GA66]に分類される特許
1 - 20 / 138
ハイブリッド車両の制御装置
制御装置
【課題】第二係合装置を直結係合状態から滑り係合状態に移行させる際に、第二係合装置が滑り係合状態になったと判定するタイミングが遅れて内燃機関の始動時間が長くなることを抑制できる制御装置が求められる。
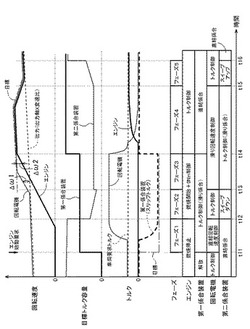
【解決手段】内燃機関と車輪とを結ぶ動力伝達経路に第一係合装置、回転電機、第二係合装置が設けられた車両用駆動装置の制御装置であって、内燃機関の始動要求があった場合に、回転電機の回転によって内燃機関の回転速度を上昇させる始動制御を行う際に、第一係合装置が滑り係合状態に移行する前に回転電機の回転速度制御を開始し、第一係合装置が滑り係合状態に移行した後、回転速度制御を終了してトルク制御を開始し、その後、第二係合装置を滑り係合状態へ移行させる制御装置。
(もっと読む)
車両制御システム及び制御装置

【課題】適正に内燃機関を始動することができる車両制御システム及び制御装置を提供することを目的とする。
【解決手段】制御装置6は、内燃機関7、回転電機10、及び、クラッチ9を制御し、クラッチ9をスリップ状態とし回転電機10側からの動力により内燃機関7の出力軸20を回転させた後に内燃機関7の燃焼室に燃料を噴射して点火し内燃機関7を始動する第1始動制御と、内燃機関7の出力軸の回転が停止した状態で内燃機関7の燃焼室に燃料を噴射して点火し出力軸20を回転させた後にクラッチ9を介した回転電機10側からの動力により出力軸20の回転をアシストし内燃機関を始動する第2始動制御とを実行可能である。そして、制御装置6は、第2始動制御を実行する場合、油圧制御装置28を制御して、クラッチ9に供給される作動流体の圧力の元圧であるライン圧を、第1始動制御を実行する場合より高くすることを特徴とする。
(もっと読む)
車両の制御装置
【課題】エンジンを停止したモータ走行中であってエンジンを始動する際に、衝撃の発生を抑制してドライバビリティを向上できる車両の制御装置を提供する。
【解決手段】エンジンと、モータジェネレータと、エンジンおよびモータジェネレータを解放状態および係合状態に切り替えるとともに作動油中に配置されたクラッチとを備え、クラッチを係合状態にしてモータジェネレータによりエンジンを始動する車両の制御装置であって、クラッチの解放時間が長いほど、クラッチが次に係合状態に切り替わる際の係合速度を小さくする(ステップS4)。
(もっと読む)
駆動力伝達装置
【課題】引き摺りトルクを低減することができるとともに、クラッチにおけるクラッチ動作の応答性を高めることができる駆動力伝達装置を提供する。
【解決手段】駆動力伝達装置1は、四輪駆動車の駆動源によって回転するハウジング12と、ハウジング12にその回転軸線Oに沿って相対回転可能に配置されたインナシャフト13と、インナシャフト13とハウジング12との間に介在して配置され、ハウジング12とインナシャフト13とを断続可能に連結するクラッチ8と、クラッチ8に第1の押付力P1を付与するメインピストン150を有する第1の押付力付与機構15と、第1の押付力付与機構15の作動に先行して作動し、クラッチ8のクラッチプレート間隔を短縮するための第2の押付力P2をメインピストン150に付与するパイロットピストン160を有する第2の押付力付与機構16とを備えた。
(もっと読む)
自動クラッチ制御装置およびその変速制御方法
【課題】運転者がアクセルを踏込んだ速度に応じて設定される目標クラッチトルクでクラッチを制御することにより運転者の要求する加速の実現が可能である変速機の自動クラッチ制御装置およびその変速制御方法を提供する。
【解決手段】クラッチ40と、目標クラッチトルク演算部3aと、変速制御部3cと、アクセル踏込速度検出部2aと、原動機回転数検出部2cと、入力軸回転数検出部3dと、アクセル踏込速度Vacが1つ以上の所定の踏込速度閾値を超えるか否かを判定する踏込速度閾値判定部3eと、いずれかの踏込速度閾値を超えた場合に入力軸と原動機4とを切離後、成立された低速ギヤ段によって増加している入力軸回転数に一致させるよう原動機回転数Neを増加制御する原動機回転数増加制御部3fと、目標クラッチトルクTcaをアクセル踏込速度Vacの大きさに応じて変更演算する目標クラッチトルク変更演算部3gと、を備える。
(もっと読む)
デュアルクラッチ式自動変速機およびその変速制御方法
【課題】走行抵抗に依存することなく良好な変速フィーリングを得ることが可能なデュアルクラッチ式自動変速機およびその変速制御方法を提供する。
【解決手段】変速制御装置は、クラッチトルク−作動量記憶部3aと、クラッチ制御部3bと、車両が平坦路を走行するときの基準走行抵抗を記憶する基準走行抵抗記憶部3cと、走行抵抗演算部3dと、目標クラッチトルクTcaを基準クラッチトルクTcbとして演算する基準クラッチトルク演算部3eと、現在の車速Vに対応する基準走行抵抗Rbpと現在走行抵抗Rpとの差を演算する差演算部3fと、現在走行抵抗Rpと基準走行抵抗Rbpとの差に応じ、現在走行抵抗Rpの方が大きければ、目標クラッチトルクTcaを基準クラッチトルクTcbより差に応じて大きくなるよう補正制御し、現在走行抵抗Rpの方が小さければ、目標クラッチトルクTcaを基準クラッチトルクTcbより差の絶対値に応じて小さくなるよう補正制御するクラッチトルク補正制御部3gと、を備える。
(もっと読む)
自動クラッチ制御装置
【課題】車両の旋回走行中に変速機の変速が行われるときに、車両の旋回走行の状況に応じて、運転者の運転嗜好に合った良好なユーザフィーリングが得られる変速を行うことが可能な自動クラッチ制御装置を提供する。
【解決手段】自動クラッチ制御装置1は、エンジン10のイナーシャに変速におけるエンジン10の目標回転数変化速度を乗算した目標慣性トルクを演算し、エンジン10の現出力トルクから目標慣性トルクを減算した値を、第1、第2クラッチ2a、2bの目標伝達トルクとして演算し、目標伝達トルクが得られる第1、第2クラッチ2a、2bの第1係合量基準値Caを設定する第1基準値設定部5cと、車速V及び旋回半径Rに基づいて第1係合量基準値Caを補正して第2係合量基準値Cbを設定する第2基準値設定部5dとを備えている。そして、第1、第2クラッチ2a、2bの係合量Cを、車両の直進走行中の変速時において第1係合量基準値Caに制御すると共に、車両の旋回走行中の変速時において第2係合量基準値Cbに制御する。
(もっと読む)
デュアルクラッチ式自動変速機
【課題】アップ変速において原動機の回転数の減速度を制御することにより、変速ショックを低減するとともに変速後における原動機の回転数の安定化を図るデュアルクラッチ式自動変速機を提供することを目的とする。
【解決手段】デュアルクラッチ式自動変速機1の変速制御装置80は、アップ変速である場合に高速段側クラッチ31の目標伝達トルクTchを演算する目標伝達トルク演算部81と、低速段側クラッチ32を切離制御し、高速段側クラッチ31を目標伝達トルクTchに制御するとともにエンジン回転数Neを同期制御して高速段側クラッチ31を接続制御するアップ変速制御部82と、エンジン回転数Neの減速度ΔNeが目標回転数減速度ΔNetを超える場合に、低速段側クラッチ32に減速度抑制トルクTuを伝達させてエンジン回転数Neの減速度ΔNeを抑制する減速度抑制トルク制御部84を備える。
(もっと読む)
車両のクラッチ制御装置
【課題】クラッチ接続時の振動を抑制する。
【解決手段】エンジンと前輪との間の動力伝達路にエンジン/デフ切離クラッチを備えた車両のクラッチ制御装置であって、車両の走行中にエンジン/デフ切離クラッチを断状態から接状態にするときに、エンジン/デフ切離クラッチと前輪との間の動力伝達路において駆動力の変化時に発生する振動の周期T1と、エンジン/デフ切離クラッチの接続開始から同期完了するまでの時間T2とが一致するように、エンジン/デフ切離クラッチの作動を制御する。
(もっと読む)
自動変速機の変速衝撃低減装置
【課題】、変速時に発生する衝撃を減少させ、クラッチの接合特性を緩やかにする自動変速機の変速衝撃低減装置を提供する。
【解決手段】
本発明は、制御圧力により作動するピストン、前記ピストンの作動により接合作動するクラッチで構成され、前記ピストンと前記クラッチとの間に、前記ピストンの作動位置に応じて段階的にスプリング弾性力を増加させるクッションスプリングが設けられ、前記クラッチ接合による変速衝撃が緩和されることを特徴とし、前記クッションスプリングは、前記クラッチの作動方向に屈曲した複数の曲面スプリングが互いに連結され、少なくとも屈曲高さの異なる2種類以上の曲面スプリングからなることを特徴とする。
(もっと読む)
内燃機関の制御装置
【課題】締結状態と開放状態の2つの状態をON/OFF的に切り替える電磁クラッチを用いて、当該電磁クラッチを締結する際のトルク段差に起因するショックを緩和できるようにした内燃機関の制御装置を提供する。
【解決手段】車両の駆動輪に内燃機関1からの駆動力が伝達されている第2の状態であれば、運転者の加速要求が大きいか否かを判定し(S15)、運転者の加速要求が大きい場合には電磁クラッチ23を締結する。運転者の加速要求が小さい場合には、運転者の加速要求が速いか否かを判定し(S16)、運転者の加速要求が速い場合には、余裕トルクTsが電磁クラッチ23を締結した際に生じるイナーシャ変化に伴う内燃機関1の出力トルクの減少量よりも大きいと判定(S17)されると、電磁クラッチ23を締結する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時のショックの発生等を抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両に搭載され、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える際、クラッチを、滑らせながら係合状態にする。そして、制御手段は、要求駆動力に応じてクラッチの滑り量を変更する。
(もっと読む)
車両制御装置
【課題】停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供すること。
【解決手段】エンジンと、変速機と、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するとき(S11−Y)に、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる(S14〜S18)所定制御を行う。
(もっと読む)
クラッチの学習制御装置
【課題】クラッチに関する学習機会を適切に確保することができるクラッチの学習制御装置を提供すること。
【解決手段】エンジンと、制御可能なクラッチと、クラッチを介してエンジンと接続されたモータと、を有するハイブリッドシステムを備え、ハイブリッドシステムの起動時にエンジンの始動要求がある(S1否定)場合、エンジンを運転させてクラッチを係合させたときのクラッチよりもモータ側の回転数の増加に基づいてクラッチの係合度合いに関して学習し(S5〜S8)、起動時にエンジンの始動要求がない(S1肯定)場合、モータに動力を出力させてクラッチを係合させたときのクラッチよりもモータ側の回転数の減少に基づいてクラッチの係合度合いに関して学習する(S2〜S4、S8)。
(もっと読む)
自動クラッチ制御装置
【課題】運転者の予期しない加速度が車両に発生することを抑制する。
【解決手段】ECU100は、クラッチストロークを変更することによって接続状態と切断状態とを切り換え可能に構成され、接続状態のときにエンジン1と変速機3との間でトルクを伝達する自動クラッチ2を制御する。また、ECU100は、エンジントルクTeを推定するエンジントルク推定部103と、エンジントルク推定部103によって推定されたエンジントルクTeの絶対値を、予め設定された補正トルクΔTeの値だけ増加することによって、クラッチトルクの第1指示値Tc1を求めるクラッチトルク算出部104と、を備える。更に、クラッチトルク算出部104は、フューエルカット状態ではない場合には、フューエルカット状態である場合と比較して、相違する補正トルクΔTeの値を用いてクラッチトルクの第1指示値Tc1を求める。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力する駆動源と、前記駆動源と駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチの駆動源側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記駆動源の実トルクを検出するトルク検出手段と、前記走行モード中に車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から低下させて、該低下に伴う前記駆動源の実トルク変化が終了したと判定したときの指令油圧を補正後指令油圧として出力する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】摩擦締結要素のスリップ制御中にブレーキ操作があった場合に、協調回生制御トルクの増加を禁止することにより、意図しないスリップによるショックの発生を防止可能なハイブリッド車両の制御装置を提供する。
【解決手段】エンジンEngに第1摩擦締結要素CL1を介して締結されたモータジェネレータMGと、モータジェネレータMGと駆動輪との間に介装された摩擦締結要素CL2を含む有段の自動変速機ATと、メカニカルブレーキ操作に基づくブレーキコントローラ9からの目標ブレーキトルクBSと車速情報に基づく最大回生トルクとの差分から目標回生トルクを算出して協調回生制御を実行する協調回生制御実行手段10とを備えている。
協調回生制御実行手段10は、メカニカルブレーキ操作による目標ブレーキトルクBSの増加の判断と第2摩擦締結要素CL2がスリップ中であるか否かを判断する判断部M11と、目標ブレーキトルクBSの増加時でかつ摩擦締結要素CL2のスリップ中に回生トルクの増加を禁止する回生トルク増加禁止手段M11とを有する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ダウンシフト中のワンウェイクラッチの係合ショックを抑制する。
【解決手段】内燃機関10と、電動機20と、前記内燃機関の出力軸及び前記電動機の出力軸に直接的又は間接的に接続された駆動車輪54と、前記電動機と前記駆動車輪との間の駆動力を断接するクラッチ25と、ワンウェイクラッチF1,F2を含む自動変速機40と、を備えたハイブリッド車両に対し、前記自動変速機がダウンシフト状態であり、前記自動変速機の変速段状態が前記ワンウェイクラッチを含む変速段であることを検出した場合に、前記クラッチをスリップ締結状態に設定する。
(もっと読む)
1 - 20 / 138
[ Back to top ]