
Fターム[3J057GB26]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御のための検出又は入力信号 (3,026) | 変速 (249) | 変速段又は変速比 (106)
Fターム[3J057GB26]に分類される特許
1 - 20 / 106
駆動力伝達装置
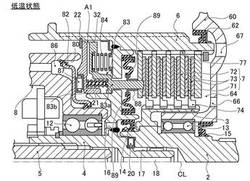
【課題】油圧クラッチの締結に必要な油圧を発生できない低温時、駆動力伝達可能状態を達成すること。
【解決手段】ハイブリッド駆動力伝達装置は、エンジンEngから駆動輪への駆動力伝達系に、クラッチハブ軸2と、クラッチドラム軸4と、両軸2,4の間に介装され、油圧供給により締結されるノーマルオープンタイプの乾式多板クラッチ7と、を備える。このハイブリッド駆動力伝達装置において、駆動力伝達系を構成する一部の部材を、低温時に形状特性が変わる素材を用いた形状記憶スプリング84とする。そして、乾式多板クラッチ7の締結に必要な油圧を発生できない低温時、形状記憶スプリング84の形状変更により駆動力伝達可能状態とする第1低温時駆動力伝達機構A1を設けた。
(もっと読む)
車両の制御装置

【課題】エンジンを停止したモータ走行中であってエンジンを始動する際に、衝撃の発生を抑制してドライバビリティを向上できる車両の制御装置を提供する。
【解決手段】エンジンと、モータジェネレータと、エンジンおよびモータジェネレータを解放状態および係合状態に切り替えるとともに作動油中に配置されたクラッチとを備え、クラッチを係合状態にしてモータジェネレータによりエンジンを始動する車両の制御装置であって、クラッチの解放時間が長いほど、クラッチが次に係合状態に切り替わる際の係合速度を小さくする(ステップS4)。
(もっと読む)
制御装置
【課題】クラッチのタッチ点の学習を、運転者の違和感を抑制しつつ、精度よく実行する技術を提供すること。
【解決手段】エンジンと、エンジンからの車輪側への動力伝達を遮断可能なクラッチと、クラッチと車輪との間を接続し、クラッチを介して伝達されたエンジンの動力を遮断することなく車輪に伝達する動力伝達機構と、を備える車両を制御する制御装置であって、車両の走行中に、エンジンが所定回転速度以上で回転駆動し、クラッチのトルク容量が0である状態で、クラッチを制御することによってクラッチのトルク容量を0の状態から増加させるトルク容量増加制御を行うトルク容量増加制御部と、トルク容量増加制御により、エンジンの回転速度の変化量が所定値となった状態におけるクラッチの制御値を特定可能な制御情報を記憶する制御である学習制御を、実行する学習制御部と、を備える。
(もっと読む)
デュアルクラッチ式自動変速機およびその変速制御方法
【課題】走行抵抗に依存することなく良好な変速フィーリングを得ることが可能なデュアルクラッチ式自動変速機およびその変速制御方法を提供する。
【解決手段】変速制御装置は、クラッチトルク−作動量記憶部3aと、クラッチ制御部3bと、車両が平坦路を走行するときの基準走行抵抗を記憶する基準走行抵抗記憶部3cと、走行抵抗演算部3dと、目標クラッチトルクTcaを基準クラッチトルクTcbとして演算する基準クラッチトルク演算部3eと、現在の車速Vに対応する基準走行抵抗Rbpと現在走行抵抗Rpとの差を演算する差演算部3fと、現在走行抵抗Rpと基準走行抵抗Rbpとの差に応じ、現在走行抵抗Rpの方が大きければ、目標クラッチトルクTcaを基準クラッチトルクTcbより差に応じて大きくなるよう補正制御し、現在走行抵抗Rpの方が小さければ、目標クラッチトルクTcaを基準クラッチトルクTcbより差の絶対値に応じて小さくなるよう補正制御するクラッチトルク補正制御部3gと、を備える。
(もっと読む)
車両用クラッチ制御装置
【課題】クラッチの温度を考慮することでクラッチ伝達特性を適正に補正するようにした車両用クラッチ制御装置を提供する。
【解決手段】アクセルペダルの開度が所定開度以下で車速が所定車速以上の減速状態にあるか否か判定し(S200,S202)、減速状態にあると判定されるとき、アクチュエータを介してクラッチを開放方向に駆動してスリップさせるクラッチスリップ制御を実行し(S206からS214)、クラッチスリップ制御が実行されている間にエンジンの回転数NEと変速機の入力軸の回転数NMの差が所定値以上になったとき、クラッチが開放されたと判断してそのときのアクチュエータの駆動位置をクラッチ切れ点として検出し(S216)、検出されたクラッチ切れ点に基づいてクラッチ容量特性を補正する。
(もっと読む)
車両のDCT制御方法
【課題】DCTを搭載した車両が減速過程で、現在走行中の現在段に比べて低段の目標段への変速を行うとき、入力軸と出力軸の間の関連部品間で発生する衝撃及び騷音の発生を防止する車両のDCT制御方法を提供する。
【解決手段】車両の減速によって先行段(N+1)から現在段(N)及び後行段(N−1)に変速段が徐々に減少する一連の変速が行われるにあたり、先行段(N+1)で締結されていたクラッチを少なくとも後行段(N−1)の変速ギア締結時まで持続的にスリップ制御するスリップ制御段階(S10)を含んでなり、スリップ制御段階(S10)は、車両の減速度に応じてスリップ制御によってクラッチを介して伝達されるトルクの量を制御することを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】惰性走行を実施する頻度を増やし燃費を向上させることができるようにした車両の走行制御装置を提供する。
【解決手段】
エンジン1と、エンジン1と駆動輪7の間に介装された動力断接手段2と、惰性走行開始条件が成立したら動力断接手段2を動力遮断状態に制御し惰性走行を開始する惰性走行制御手段130とを備え、惰性走行開始条件には、車両の走行路が下り坂又は所定条件を満たす上り坂であることが含まれ、惰性走行制御手段130は、車両の前方に上り坂の頂上があるか否かを判定する頂上判定手段124と頂上判定手段124により頂上があることが判定されると車両が惰性走行を開始した場合の車両の走行速度の変化を推定して惰性走行によって車両が頂上に到達した際の走行速度Vが下限速度Vlow以上となることを所定条件として惰性走行の開始を判定する惰性走行開始判定手段125とを有する。
(もっと読む)
内燃機関の制御装置
【課題】締結状態と開放状態の2つの状態をON/OFF的に切り替える電磁クラッチを用いて、当該電磁クラッチを締結する際のトルク段差に起因するショックを緩和できるようにした内燃機関の制御装置を提供する。
【解決手段】車両の駆動輪に内燃機関1からの駆動力が伝達されている第2の状態であれば、運転者の加速要求が大きいか否かを判定し(S15)、運転者の加速要求が大きい場合には電磁クラッチ23を締結する。運転者の加速要求が小さい場合には、運転者の加速要求が速いか否かを判定し(S16)、運転者の加速要求が速い場合には、余裕トルクTsが電磁クラッチ23を締結した際に生じるイナーシャ変化に伴う内燃機関1の出力トルクの減少量よりも大きいと判定(S17)されると、電磁クラッチ23を締結する。
(もっと読む)
クラッチ制御装置
【課題】加速要求によってエンジンを始動する際における応答性を確保できるクラッチ制御装置を提供すること。
【解決手段】クラッチ制御装置2に、車両1のエンジン10と駆動輪44と間の回転トルクの伝達を遮断することができるクラッチC1と、停止中のエンジン10に回転トルクを伝達することによりエンジン10の始動が可能なスタータ12と、車両1の走行中にエンジン10を停止させるエンジン停止制御時にドライバの要求によりスタータ12によってエンジン10を始動する際にエンジン10の始動に失敗したか否かを判定する走行状態判定部78と、クラッチC1の係合制御が可能に設けられていると共に、走行状態判定部78でエンジン10の始動に失敗したと判定した場合には、エンジン10の始動前にクラッチC1を係合させる走行制御部74と、を備える。
(もっと読む)
クラッチ制御装置
【課題】急ブレーキ時に自動クラッチを確実に切断状態としてエンストの発生を防ぐことが可能なクラッチ制御装置を提供する。
【解決手段】クラッチ制御装置は、アクチュエータによって接続状態と切断状態とを切り換え可能に構成され、接続状態のときにエンジン1と変速機3との間でトルクを伝達する自動クラッチ2を備え、自動クラッチ2のクラッチトルクが目標クラッチトルクに一致するようにフィードバック制御を行う。車両のアクセル開度θACを検出するアクセル開度センサ405と、クラッチトルクのフィードバック制御の積分項TcΔNEに対し上下限ガードを設定するガード手段とを備え、上限ガードおよび下限ガードの各ガード値は、アクセル開度θACが小さいほど、積分項TcΔNEを小さく制限するように設定される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ダウンシフト中のワンウェイクラッチの係合ショックを抑制する。
【解決手段】内燃機関10と、電動機20と、前記内燃機関の出力軸及び前記電動機の出力軸に直接的又は間接的に接続された駆動車輪54と、前記電動機と前記駆動車輪との間の駆動力を断接するクラッチ25と、ワンウェイクラッチF1,F2を含む自動変速機40と、を備えたハイブリッド車両に対し、前記自動変速機がダウンシフト状態であり、前記自動変速機の変速段状態が前記ワンウェイクラッチを含む変速段であることを検出した場合に、前記クラッチをスリップ締結状態に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ワンウェイクラッチを係合する変速段における、出力回転数低下の発生を抑制できるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngから駆動輪への駆動系に設けられたモータジェネレータMGと左右後輪RL,RRとの間に介装され、変速比が異なる複数の変速段を有するとともにワンウェイクラッチを係合する変速段を有する自動変速機ATと、モータジェネレータMGと左右駆動輪RL,RRとの間に介装され、スリップ状態と非スリップ状態とを形成する第2クラッチCL2と、第2クラッチCL2を、車速に応じてスリップ状態と非スリップ状態とに切り替える統合コントローラ10と、を備え、統合コントローラ10は、自動変速機ATがワンウェイクラッチを係合する変速段であるときには、前記駆動輪への目標トルクがあらかじめ設定された設定値以下では第2クラッチCL2をスリップ状態に制御するようにした。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間のトルク伝達を断接する摩擦係合要素における目標伝達トルク容量の補正精度を向上することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ(モータジェネレータ)2と駆動輪(タイヤ)7,7の間に介装され、モータ2と駆動輪7,7との間のトルク伝達を断接する摩擦係合要素(第2クラッチ)5における目標指令値(目標伝達トルク容量)を設定する際、補正量演算手段(補正量演算部)401Bにより、目標指令値の補正量を、摩擦係合要素5への入力トルク(推定モータトルク)が増大するほど大きな値に設定する。
(もっと読む)
惰行制御装置
【課題】車両振動の影響による惰行制御の終了を防止できる惰行制御装置を提供する。
【解決手段】惰行制御判定マップ2へのクラッチ回転数とアクセル開度のプロット点が惰行制御可能領域内にあって、アクセルペダル操作速度が所定範囲内にて、かつクラッチ回転数とアクセル開度のプロット点が惰行制御しきい線をアクセル開度減少方向に通過したとき、クラッチを断すると共にエンジン回転数を低下させて惰行制御を開始し、アクセルペダル操作速度が所定範囲外となったか又はプロット点が惰行制御可能領域外に出たとき惰行制御を終了する惰行制御実行部3と、アクセルペダル操作加速度が車両振動判定値範囲外のときには、惰行制御実行部3による惰行制御開始・終了の判定を無効とし、アクセルペダル操作加速度が車両振動判定値範囲内のときは、惰行制御実行部3による惰行制御開始・終了の判定を有効とする振動影響除去部4とを備える。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
車両の前後進クラッチ制御装置
【課題】部品の寸法差や操作方法の差による影響を受けることなく、ペダル操作によるフィーリングの良い発進操作が常に安定して可能となる前後進クラッチ制御装置を提供する。
【解決手段】前後進クラッチ制御装置は、クラッチペダルOの操作角度検出結果に基づいて、前進クラッチ又は後進クラッチ35a,35bへの送油圧を制御可能に構成し、前記クラッチペダルOを踏み込んで前進クラッチと後進クラッチ35a,35bとを共に遮断した状態から、該クラッチペダルOの復帰操作の初期には、前記前進クラッチまたは後進クラッチ35a,35bのクラッチ板Sがミートする位置までクラッチピストンRをすばやく移動させるように所定の定圧で送油し、この送油中の圧力が設定圧力以上に達したときに、前記定圧での送油を中止して、クラッチペダルOの操作角度に応じて変更される圧力での送油に切り換えるように連繋するものである。
(もっと読む)
惰行制御装置
【課題】高速走行時でのエンジンオーバーランが防止でき、しかも、車速低下時には迅速にシフトダウンができる惰行制御装置を提供する。
【解決手段】惰行制御開始条件成立のときクラッチを断しエンジン回転数を低下させ、惰行制御終了条件成立のときエンジン回転数を上昇させてクラッチを接する惰行制御実行部3と、変速マップ4から目標ギア段を設定し、クラッチを断し、目標ギア段へのシフト切替を行い、クラッチを接する変速制御部5と、惰行制御中に、クラッチ回転数が所定値を超えているときは、変速制御部5によるシフト切替を禁止し、クラッチ回転数が所定値以下のときは、変速制御部5によるシフト切替を許可する調停部6とを備える。
(もっと読む)
ハイブリッド車両の始動制御装置及び方法
【課題】ハイブリッド車両において、クラッチスリップを利用した始動制御の時に、トルク衝撃の発生を防止する。
【解決手段】本発明は、ハイブリッド車両の情報を分析して、クラッチスリップを利用した始動条件であるかを判断する過程と、クラッチスリップを利用した始動条件であれば、変速段が特定変速段以上であるかを判断する過程と、変速段が特定変速段以下であれば、特定変速段以上にアップシフト変速させる過程と、クラッチに油圧を印加してクラッチをスリップ制御し、クラッチスリップによってエンジンが設定速度以上であれば、燃料噴射及び点火制御でエンジンを始動させる過程とを含む。
(もっと読む)
車両用駆動制御装置
【課題】ハイブリッド車両において、モータ走行からエンジン走行に切り替える際、電動モータ17にトルクアップする余裕がない場合でも、当該切替時のトルクショックを抑制できるようにする。
【解決手段】停止したエンジン11の膨張行程にある気筒に供給された燃料を点火・燃焼させることによって該エンジン11を始動させる。電動モータ17が現在出力可能な最大トルクと現在の発生トルクと差である余裕トルクを演算する。余裕トルクが所定値よりも小さいときには、エンジン回転数が、車速及び変速比に応じた同期回転数より所定回転数以上に上昇したときに、エンジン11と車輪14とを動力が伝達されるように断続手段で締結とするとともに、電動モータ17のトルクダウン制御を実行する
(もっと読む)
アイドルストップ車の制御装置
【課題】アイドルストップ復帰時に発進クラッチへの供給油圧を制御するリニアソレノイド弁を適正に制御し、ベルト滑りと発進遅れを防止すること。
【解決手段】発進クラッチB1への供給油圧を制御する常開型のリニアソレノイド弁SLSと、リニアソレノイド弁を複数の電流−油圧特性に応じて制御するソレノイド弁駆動回路100とを備え、アイドルストップからの復帰時に、オイルポンプが発生する油圧を検出し、その発生油圧が許容値未満である場合に、リニアソレノイド弁の弁開度が大きくなる電流−油圧特性を選択して、リニアソレノイド弁への指示電流を決定する。
(もっと読む)
1 - 20 / 106
[ Back to top ]