
Fターム[3J062AC08]の内容
Fターム[3J062AC08]に分類される特許
81 - 97 / 97
直動ワンウェイクラッチ
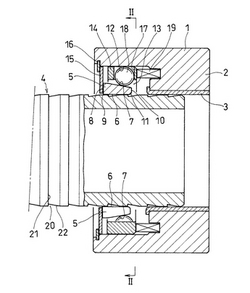
【課題】軸を軸方向の一方にロックする直動ワンウェイクラッチにおいて、軸方向保持力の向上を図る。
【解決手段】外輪1の内側に挿入した軸4の外径面上に複数のリングセグメント5を設け、各リングセグメント5の外周に軸方向に傾斜するテーパ面7を設け、そのテーパ面7と外輪1の内周に形成された平面12との間に形成されたくさび状空間13にローラ18を組込む。ローラ18を保持する保持器14を弾性部材19によりローラ18がテーパ面7および平面12に圧接する方向に付勢する。軸4にロック方向の力が負荷されたとき、ローラ18をテーパ面7および平面12に係合させると共に、リングセグメント5を軸4の外径面に圧接させる。軸方向力が増大したとき、軸4とリングセグメント5の接触部で滑りを生じさせ、リングセグメント5の大端面8の内周部にリング溝20の係合面21を係合させるようにして、軸4に対する軸方向保持力の向上を図る。
(もっと読む)
回動付勢装置

【課題】 従来の回動付勢装置が有する諸問題を解決する画期的な装置を得る。
【解決手段】 内輪軌道面21及び外輪軌道面31の少なくとも一方が、内外輪2,3の相対回転に伴い転動体4を転動させつつ円筒ころ4の挟持間隔を漸次狭くして、前記相対回転により生じた位相差を解消する方向の回動付勢力を内外輪2,3間に付与する異形軌道面2k,3kを少なくとも一部に有している。
(もっと読む)
平衡サポート装置
【課題】
【解決手段】
力発揮構造を有する力発揮装置であって、第一の側部としてのロードピボットの周囲を旋回可能なロードアームと、前記ロードアームと終点に接続され、力発揮構造の第二の側部を形成する弾性部材を具える。第三の側部は、前記終点からロードピボットへのラインによって形成される。第一の調整機構は終点を移動させて、当該構造の第三の側部の長さを変化させる。第二の調整機構は第一の調整方向に対して実質的に垂直に終点を移動させ、終点の位置はロードピボットを通る実質的に垂直なラインと交差するようになる。力修正装置を設けてロードアームの動作に応答して弾性部材の終点位置を動的に調整するようにしてもよい。
(もっと読む)
倍力装置
【課題】比較的簡素な構成であって従来の同種装置よりも低廉にて供給でき、しかも、入力に対し十分に倍加された押圧・押込みのための出力が得られる倍力装置を提供することを課題とする。
【解決手段】ベース板1上に、入力手段22と、前記入力手段22から入力を受ける入力用トグル機構11と、前記入力用トグル機構11によって駆動される出力用トグル機構5、6とを備えて成り、前記出力用トグル機構5、6から出力可能にした。前記入力用トグル機構5、6は、溝カム14に係合するカムフォロア16を備えていて、前記溝カムの回転に伴って入力を受ける。
(もっと読む)
駆動装置
【課題】バッテリを電源とせず、機能体の動作を駆動できる駆動装置を提供する。
【解決手段】車両に搭載される機能体を駆動する駆動装置に、車両を使用する際に必然的な乗員の動作によって動く入力手段と、入力手段と機能体とに接続され、入力手段の動きに従動して駆動力を蓄積し、駆動力で機能体を駆動する駆動手段と、を設ける。
(もっと読む)
直動機構
【課題】 真空状態で利用可能な低発塵型の直動機構を、簡易な構造で実現する。
【解決手段】 直動機構1を、案内レール41及びこの案内レール41に沿って移動する可動スライダ42を有する直動ガイドを、開口部23を有する防塵ケース21に収容し、この直動ガイドに案内される可動部43を、防塵ケース21の開口部23内において移動可能に配置し、可動部43を駆動する駆動ベルト38を、防塵ケース21の開口部23を塞ぐように配置して、構成する。
(もっと読む)
ナット、ネジおよびケーブルを備える伝達装置
モータ(5)と移動される器具(1,2)との間にあるネジ、ナットおよびケーブルを備える伝達装置(6、7、12、13、20および21)であって、少なくとも1個の二重滑車(14)を備え、その滑車は、ネジ(7)に近いケーブルライン(12)に関してその器具に近いケーブルライン(20)の移動を増幅する伝達装置。ネジ(7)により提供される移動の減少という通常の利点の一部を犠牲にすることにより、器具(1)についての一層大きい移動走行が、同一サイズの制約、またはネジ(7)の長さによる制約の場合に得られる。  (もっと読む)
(もっと読む)
電磁式緩衝器
【課題】 電磁式緩衝器において、車輪側からの横入力作用時にも、ボールねじ軸とボールねじナットをスムースに回転すること。
【解決手段】 車輪側のダンパケース13に固定したボールねじナット11に、車体側のシャフトガイド14に支持したボールねじ軸12を螺合し、このボールねじ軸12にモータを結合してなる電磁式緩衝器1において、車体に対しシャフトガイド14を支持するマウント16を有し、マウント16は、シャフトガイド14の中心軸に直交する前後左右に設けたラジアルベアリング43、45に該シャフトガイド14を揺動自在に支持してなるもの。
(もっと読む)
ベアリングのボール配列装置
【課題】タクトタイムを短縮しながら、小さいベアリングから大きいベアリングまで能率よくボールを均等に配置する。
【解決手段】ベアリングのボール配列装置は、内輪2と外輪3の間に設けられるリング状軌道溝4に複数のボール5を入れている未配列ベアリング1’を定位置にセットする基台10と、この基台10にセットされた未配列ベアリング1’のリング状軌道溝4に軸方向に移動しながら挿入されて、リング状軌道溝4のボール5を均等に配置する複数の隙間調整ロッド11と、複数の隙間調整ロッド11を順番にリング状軌道溝4に押し出す押出機構12を備えている。隙間調整ロッド11は、別々に独立して隙間調整ロッド11に挿入されるように、基台10に連結している。ボール配列装置は、押出機構12が複数の隙間調整ロッド11を相対運動させながら、順番にリング状軌道溝4に挿入して、ボール5を均等に配置する。
(もっと読む)
スライド機構及びワーク搬送装置
【課題】回転軸に取り付けられたアームの長さを変更することができるとともに、ワークを直線的に移動可能にする。
【解決手段】回転軸18と、回転軸に接続され、回転軸の周りに180°未満の角度で弧状に旋回する接続手段20と、接続手段の端部Eがスライド移動可能に係合され、回転軸に対して垂直に延在する案内手段24とを備える。接続手段の旋回により端部が案内手段に沿ってスライド移動を行うとき、この端部と回転軸との間の距離の変化に応じて、接続手段が伸縮する。
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 簡単な構成により、より正確な直線移動行程を実現できる直線移動機構およびこれを用いた搬送ロボット、さらにはハンドを2つ備えることによってワークの搬送効率を高めた搬送ロボットを提供する。
【解決手段】 ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程に沿って移動可能な移動部2A,2B材と、これら移動部材2A,2Bを駆動する駆動機構3A,3Bと、を備えた直線移動機構B1であって、駆動機構3Aは、移動行程GLを挟んで配置され、かつ同期駆動される一対の往復動機構を含んでおり、移動部材2Aは、移動行程を挟んで離間する一対の連結部材24aにおいて、上記一対の往復動機構に連結されている。
(もっと読む)
運動変換装置及びそれを備えた材料送り装置
【課題】揺動回転運動と往復直線運動との変換を行う運動変換装置の作動時のガタツキや振動を抑制し、作動精度を向上させる。
【解決手段】揺動回転運動を行う軸51に凹溝51aが形成され、往復直線運動可能を行う作動体52の作動片52bが凹溝51aに挿入されている。作動片52bは、円弧状に湾曲して凹溝51aの内面51bに相対回動可能に係合する凸面52b’と、凸面52b’と同心関係でその凸面より曲率半径が小さい円弧状の凹面52b”とを有する。凹面52b”と凹溝51aの内面51cとの間に運動伝達部材55が装着されている。運動伝達部材55は、作動片52bの凹面52b”に相対回動可能に係合する円弧状の凸面55aと、凹溝51aの内面51cに相対摺動可能に係合する平坦面55bとを有する。
(もっと読む)
スライド装置及び携帯電話
【課題】 スライド式操作を片手で容易に行えるようにした携帯製品に用いられるスライド装置及び携帯電話を提供する。
【解決手段】 携帯電話の機器本体2と表示部を備えた蓋体との間に、前記機器本体2に対し蓋体を開方向又は閉方向に付勢させる弾性部材を設けて機器本体2に蓋体をスライド可能に設け、蓋体を閉位置又は開位置で機器本体2にロックするロック部29を設け、前記ロック部29に連係し、ロック部29のロックを解除する解除手段38を備えたことを特徴とする。
(もっと読む)
2つのサブアセンブリ手段から構成される可動要素を移動させる手段を備えるパラレルロボット
本発明は、基部要素(1)と該基部要素に移動を引き起こす手段を介して連結された可動要素(2)とを備える形式のロボットに関する。該移動を引き起こす手段は、第1サブアセンブリと第2サブアセンブリとを備え、第1サブアセンブリは、可動要素(2)を略垂直方向に沿って移動させるように設計され、第2サブアセンブリは、第1サブアセンブリを可動要素(2)に連結し、及び可動要素(2)を第1サブアセンブリとは無関係に略水平面内において移動させるように平行に並んで作動することができる少なくとも3つのアクチュエータ(4)を備えている。  (もっと読む)
(もっと読む)
動力伝達機構
【課題】 リニアアクチュエータを用いて流体制御弁を駆動する装置において、流体制御弁の位置に合わせて伝達ゲインを制御する。
【解決手段】 レバー13をカム部材13a、13bにより構成し、レバー13の一端を流体制御装置本体Bに設けられたピボット17により回動自在に保持する。流体制御弁14のロッド16の先端部18をカム部材13aに係合する。流体制御弁14が閉じられているとき、レバー13は、ピボット17から遠い側にあるカム部材13bを介してリニアアクチュエータの直動駆動部12に当接する。流体制御弁14が開かれ、レバー13が一定の回動角に達すると、ピボット17に近いカム部材13aが直動駆動部12に当接し、カム部材13bは、直動駆動部12から離接する。これにより、力点PAPがカム部材13bからカム部材13aに移動し、伝達ゲインが変更される。
(もっと読む)
往復式回転駆動機構
【課題】 所定の環境条件に調整された空間内に設置されて出力部を1軸に沿って往復移動させると共に該1軸回りに回転させる駆動機構において、粉塵と振動の発生を抑制する。
【解決手段】 本発明に係る往復式回転駆動機構は、角柱状の駆動シャフト540に沿って往復駆動されるホルダー70と、駆動シャフト540の外周面に余裕を持って嵌合する筒状の本体と、該本体の外周面と前記ホルダー70の内周面の間に介在するころがり軸受77とを具えると共に、前記本体には、駆動シャフト540の軸方向に沿う2箇所にそれぞれ、駆動シャフト540の外周面を構成する複数の側面の内、駆動シャフト540の回転軸を中心とする点対称位置の少なくとも2つの側面に沿って転動すべき複数のローラ74が枢支され、該本体に前記出力部となる駆動ギア79が設けられている。
(もっと読む)
多関節ロボット
【課題】 多関節ロボットの、ツールや被搬送物の移動距離の増大を図りつつ小型化を促進する。
【解決手段】 多関節アーム54を構成する複数のアームのうち、アーム40の、それよりも多関節アーム54の先端寄りに配置されたアーム44から受けるトルクの力点である関節部42を、支持台60によって所定位置で停止させる。そして、アーム40よりも多関節アーム54の先端寄りに配置されたアーム44、48,52のみを作動させる。アーム40よりも多関節アーム54の基端寄りに配置されたアーム30に対し、アーム40が受けるトルクが作用することがなくなり、アーム30の負荷が軽減される。従って、アーム40よりも多関節アーム54の基端寄りに配置された関節部31、38の、各駆動要素の小型化を図ることができる。
(もっと読む)
81 - 97 / 97
[ Back to top ]