
Fターム[3J062CA08]の内容
伝動装置 (28,056) | 歯車等往復運動と非無限回転運動の変換装置 (1,025) | 特徴となる伝動手段 (676) | 可撓部材 (221) | 複数の可撓部材 (29)
Fターム[3J062CA08]に分類される特許
21 - 29 / 29
複軸移動可能な搬送装置
【課題】1つの駆動モータの駆動により互いに直交する2軸を含む複軸の移動・停止が可能な搬送装置を提供する。
【解決手段】第1駆動ドラム11に巻回された第1ワイヤ13と、第2駆動ドラム21に巻回された第2ワイヤ23と、第1ワイヤ23との連結・解除を選択する第1クラッチ15を介して第1ワイヤ13に取り付けられた第1取付部10と、第2ワイヤ23との連結・解除を選択する第2クラッチ25を介して第2ワイヤ23に取り付けられた第2取付部20とを備え、第1または第2クラッチ15(25)の一方を連結状態とし、かつ、他方を解除状態とすることで、第1取付部10の第1方向D1への移動と、第2取付部20の第2方向D2への移動とを1つの駆動モータMにより選択可能とした。
(もっと読む)
パワーウォークインシート

【課題】 人力でのウォークイン作動を、パワーウォークインシートにおいて得るという目的を、構成の複雑化等を伴うことなく、またその機能性の低下を伴うことなく実現可能とした。
【解決手段】 パワースライド装置14(L,R)の駆動装置が、回転ドラムアセンブリ32(L,R)に対するモータアセンブリ28からの動力の伝達/非伝達を切り換えるクラッチ機構56を備えたケーブル駆動手段12から形成されるとともに、シートバックの前倒しに連動したロックオフ動作、およびこのシートバックの起立復元に連動したロックオフ解除動作のなされるラッチ式のスライドロック手段が、そのマニュアルロックオフ操作をも可能に、パワースライド装置に併設されている。そして、クラッチ機構56の非通電時、その遮断による回転ドラムアセンブリ32(L,R)の単独作動保障により、パワースライド装置14(L,R)のマニュアル作動を可能としている。
(もっと読む)
アクチュエータ装置
アクチュエータ装置(5)は、電動モータ式の調節駆動装置(7)と、第1及び第2の被駆動軸とを有している。アクチュエータ装置(5)はさらに、少なくとも1つの調節部材を有しており、この調節部材は、第1の被駆動軸及び/又は第2の被駆動軸と連結されている。調節部材は、伝達部材と連結するために構成されている。調節部材は、伝達部材と協働して第1の被駆動軸若しくは第2の被駆動軸の回転運動を伝達部材のリニア(線)運動に変換する。さらに、アクチュエータ装置(5)は補償伝動装置を有しており、この補償伝動装置は、入力側が電動モータ式の調節駆動装置(7)に連結されていて、第1の被駆動軸及び第2の被駆動軸を有している。補償伝動装置は、入力側のトルクを、第1の被駆動軸及び第2の被駆動軸に伝達し、かつ分割するように構成されている。 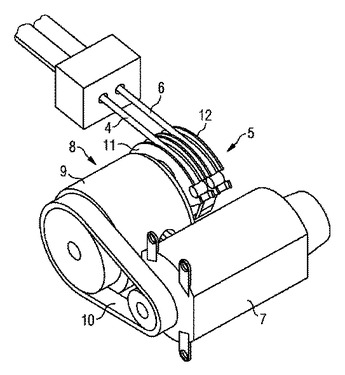 (もっと読む)
(もっと読む)
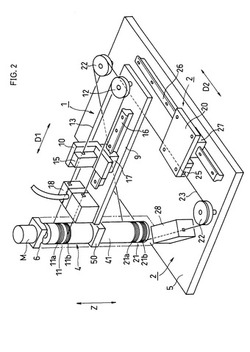
ナット、ネジおよびケーブルを備える伝達装置
モータ(5)と移動される器具(1,2)との間にあるネジ、ナットおよびケーブルを備える伝達装置(6、7、12、13、20および21)であって、少なくとも1個の二重滑車(14)を備え、その滑車は、ネジ(7)に近いケーブルライン(12)に関してその器具に近いケーブルライン(20)の移動を増幅する伝達装置。ネジ(7)により提供される移動の減少という通常の利点の一部を犠牲にすることにより、器具(1)についての一層大きい移動走行が、同一サイズの制約、またはネジ(7)の長さによる制約の場合に得られる。  (もっと読む)
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 簡単な構成により、より正確な直線移動行程を実現できる直線移動機構およびこれを用いた搬送ロボット、さらにはハンドを2つ備えることによってワークの搬送効率を高めた搬送ロボットを提供する。
【解決手段】 ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程に沿って移動可能な移動部2A,2B材と、これら移動部材2A,2Bを駆動する駆動機構3A,3Bと、を備えた直線移動機構B1であって、駆動機構3Aは、移動行程GLを挟んで配置され、かつ同期駆動される一対の往復動機構を含んでおり、移動部材2Aは、移動行程を挟んで離間する一対の連結部材24aにおいて、上記一対の往復動機構に連結されている。
(もっと読む)
汚泥等回収装置
【課題】駆動系を構成する機構を水中に浸からせずかつ水中で機構同士を接触や摺動をさせないようにして、保守や管理、さらには点検や修理に手数を要さないようにする。
【解決手段】汚泥を端部Qの汚泥ピット11で回収し、スカムを中央部Cのスカムスキマ13で回収するのに、スカムスキマ13を挟む各領域に掻き寄せ機構10P,10Qを設ける。各掻き寄せ機構10P,10Qは、第1、第2の各掻き寄せ板2A,2Bと、沈殿池1の上方より各掻き寄せ板2A,2Bを吊持して移動させる移動機構3とを含む。第1の掻き寄せ機構10Pの移動機構3は、第1の掻き寄せ板2Aを池底aに沿って、第2の掻き寄せ板2Bを水面bに沿って、それぞれ端部Pから中央部Cへ移動させる。第2の掻き寄せ機構10Qの移動機構3は、第1の掻き寄せ板2Aを池底aに沿って中央部Cから端部Qへ、第2の掻き寄せ板2Bを水面bに沿って端部Qから中央部Cへ、それぞれ移動させる。
(もっと読む)
ロボット
【課題】 プーリからワイヤが外れてしまうのを防止することが可能なワイヤ駆動型のロボットを提供する。
【解決手段】 ロボットは、一方側部材16と、その一方側部材16に回転可能に接続されている他方側部材18と、一端部が前記他方側部材18に接続されているワイヤ30、31、32と、そのワイヤ30、31、32の他端部に接続されており、ワイヤ30、31、32を伸縮させるアクチュエータ22、23、24と、そのワイヤ30、31、32の中間部が掛けられており、ワイヤ30、31、32の伸張方向を変化させるプーリ56、57、58と、そのプーリ56、57、58に掛けられたワイヤ30、31、32が反プーリ側に移動してプーリ56、57、58からワイヤ30、31、32が外れるのを規制するワイヤガード70、71、72とを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】伝達効率が高く、しかもラトル音に由来する騒音の発生する懸念のない電動パワーステアリング装置を提供する。
【解決手段】減速機は電動モータ3の動力を所定の伝達動力を保って出力軸2に伝える伝達機構4を有する。この伝達機構4は初段減速部5と2段減速部6とを備える。初段減速部5は第1プーリ7と第2プーリ8と第1歯付きベルト9とから構成される。2段減速部6は第3プーリ10と第4プーリ11と第2歯付きベルト12とから構成される。伝達機構4においてすべり摩擦が僅かしか発生しないので、伝達効率を向上することができる。伝達機構4にギヤかみ合い部が存在しないので、ラトル音が発生しない。
(もっと読む)
アクチュエータ
本発明は、アクチュエータに関し、特にロボットアームの制御に用いられる直動式アクチュエータおよび回転式アクチュエータに関する。本発明は、実質的にバックラッシュの無い回転運動および/または直線運動を達成する比較的に低コストの手段を提供するものである。本発明で提供するアクチュエータ(10)は、第一の駆動プーリ(28)と、第二の駆動プーリ(29)と、第一の被駆動プーリ(52、70)と、第二の被駆動プーリ(53、72)と、第一の駆動プーリ、第二の駆動プーリ、第一の被駆動プーリおよび第二の被駆動プーリと係合する無端駆動ベルト(40)と、第一の駆動プーリおよび第二の駆動プーリを駆動して無端状駆動ベルトを回転および駆動させるために連結されているモータ(19)と、被駆動プーリのうちの少なくとも一つを支持している被駆動部材(50、88、71、73)とを備えており、第一の駆動プーリおよび第二の駆動プーリが、一緒に回転するように相互に接続され、回転時には、第一の駆動プーリの周速度が第二の駆動プーリの周速度と異なるように配設され、無端ベルトが、第一の駆動プーリの周速度と第二の駆動プーリの周速度との間の差が被駆動部材に動きを生じさせるように、駆動プーリおよび被駆動プーリのまわりに巻き付けられている。 (もっと読む)
21 - 29 / 29
[ Back to top ]