
Fターム[3J552SA07]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 伝動装置要素 (4,182) | 有段変速機 (2,341) | 摩擦要素 (1,780) | 摩擦要素への供給油圧 (955)
Fターム[3J552SA07]の下位に属するFターム
Fターム[3J552SA07]に分類される特許
121 - 140 / 621
動力伝達装置
【課題】非走行用ポジションから走行用ポジションへシフト操作された際に走行の開始をスムーズに行なえるようにする。
【解決手段】シフトレバーがN(ニュートラル)ポジションのときにクラッチC1内の作動油をマニュアルバルブ40を介してドレンする油圧回路30が組み込まれた動力伝達装置を備える車両において、エンジンが自動停止されている状態でシフトレバーがNポジションから解除されたときには、その直後に電磁ポンプ70の駆動を開始し、シフトレバーがDポジションを確定したときには、エンジンを自動始動すると共にエンジンが完爆したときに電磁ポンプ70の駆動を停止する。これにより、エンジンの自動始動に伴って機械式オイルポンプ32が駆動を開始したときにクラッチC1を迅速に係合して車両を発進させることができる。
(もっと読む)
自動変速機の変速制御装置

【課題】ハイ側変速段を制限し始める直前における無駄で煩わしいアップシフトを抑制し得る変速制御装置を提案する。
【解決手段】自車からカーブ入口までの距離L1が接近判定距離未満になるt0と、この距離L1が0になるt3との間であって、アクセル開度APOをアイドル開度にする減速操作が行われるt2に、ハイ側変速段を、車速VSPが瞬時t3に安全なカーブ通過速度となるのに必要な上限変速段に制限する。ハイ側変速段制限制御が開始される前は変速パターンに基づく変速制御であるため、t2直前に破線で示すように無駄なアップシフトが発生する。これを抑制するため、カーブ入口で車速VSPを安全なカーブ通過速度に低下させるのに必要な時々刻々の目標減速度G1を演算し、設定減速度G1s以上になるt1に、即ちハイ側変速段の制限が必要になると予想されるとき、アップシフト変速線を高車速側へ移動させる。
(もっと読む)
変速機の制御装置
【課題】 変速機の係合装置を作動させる油圧アクチュエータの推力および作動応答性を両立させる。
【解決手段】 油圧アクチュエータA1は、大きい第1受圧面を有する1速ピストンPS1と小さい第2受圧面を有する3速ピストンPS3とを備えており、低温時の第1モードで第1受圧面だけに油圧を作用させて油圧アクチュエータA1を右方向に駆動して1速変速段を確立し、常温時の第2モードで第1、第2受圧面の両方に油圧を作用させて油圧アクチュエータA1を右方向に駆動して1速変速段を確立し、常温時の第3モードで第2受圧面だけに油圧を作用させて油圧アクチュエータA1を左方向に駆動して3速変速段を確立する。第1モードでは油圧アクチュエータA1が大推力、低速で作動するので、作動油の粘性が高くなる低温時であっても確実な変速を可能にすることができ、第2モードでは油圧アクチュエータA1が小推力、高速で作動するので、大推力が必要とされない常温時に高い変速応答性を確保することができる。
(もっと読む)
無段変速機搭載車両及びその制御方法
【課題】ニュートラル制御を行う無段変速機を搭載した4輪駆動車両において、2輪駆動車両と同等の燃費効果を実現する。
【解決手段】本発明は、4輪駆動状態で走行可能な無段変速機搭載車両において、ニュートラル制御によって前進クラッチが非締結状態に保持されているときに前進クラッチを締結状態へと変化させながらプライマリプーリの回転を検出し、最初に回転が検出された時点における供給油圧に基づいて、クラッチミートポイントを学習制御するクラッチミートポイント学習制御手段(S5)を備え、車両の再発進時に4輪駆動状態で再発進する必要がないと判定されたとき、駆動状態を2輪駆動状態に切り替えてから学習制御を行う(S4)。
(もっと読む)
自動変速機の制御装置
【課題】自動変速機において皿バネやアキュムレータなどの影響を受けることなく、摩擦係合要素の油圧の立ち上がりを管理して運転者が所望する変速フィーリングを実現するようにした自動変速機の制御装置を提供する。
【解決手段】変速するときのトルク相の目標時間を算出し(S100)、エンジンの運転状態を示すパラメータに基づいてエンジントルクを推定し(S102)、変速先の油圧クラッチ(摩擦係合要素)の伝達トルクの初期値が算出されたトルク相の目標時間の終端時にエンジントルク相当値に到達するまでの間のトルク目標傾きを算出し(S104)、算出されたトルク目標傾きを油圧目標傾きに変換し(S106)、それなどから予め設定された第1、第2の特性を検索して変速先の油圧クラッチCnへの油圧の指令値QATを算出し(S108からS112)、算出された指令値に基づいて油圧を供給する(S114)。
(もっと読む)
自動変速機
【課題】摩擦要素のばらつきを学習してシフトクオリティを向上できる自動変速機を提供することを目的とする。
【解決手段】変速の前に、解放側摩擦締結要素(32、33)の締結圧を減少させて、当該解放側摩擦締結要素(32、33)をスリップさせ、締結側摩擦締結要素(33、32)の締結圧を上昇させて解放側摩擦締結要素(32、33)を再締結してスリップを解消し、解放側摩擦締結要素(32、33)の再締結の動作に基づいて、変速機構(30)の変速時に締結側摩擦締結要素(33、32)を解放状態からトルク伝達開始状態とする制御量を学習する。
(もっと読む)
電動車両の制御装置
【課題】有段の自動変速機を備えた電動車両において、変速ショックを抑えながら素早い変速が可能な電動車両の制御装置を提供すること。
【解決手段】駆動系に、モータ/ジェネレータMGと、有段の自動変速機ATと、左右後輪RL,RRと、を備え、有段の自動変速機ATの変速中、変速機入力回転数が目標入力回転数となるようにモータ/ジェネレータMGの回転数を制御する。このFRハイブリッド車両において、モータ/ジェネレータMGの回転数制御中にモータトルクを補正するモータトルク補正手段(ステップS766)は、車両重量推定手段(ステップS765)によって推定された推定車両重量が大きいほどモータトルクの増大補正量を大きくする。
(もっと読む)
車両用自動変速機の油圧制御装置
【課題】不使用のリニアソレノイドバルブに関して変速応答性を損なうことなく消費流量をできるだけ少なくして燃費を向上させる。
【解決手段】シフトレバー72が「N」ポジションへ操作された時に、「D」または「R」ポジションへ切換え操作された場合に係合させる第1クラッチC1、第3クラッチC3、および第2ブレーキB2のリニアソレノイドバルブSL1、SL3、SL6を最低調圧状態とするため、それ等の「D」または「R」ポジションへ切換え操作されて第1変速段「1st」または第1後進変速段「Rev1」を成立させる際の変速応答性を確保できる一方、それ以外の不使用リニアソレノイドバルブSL2、SL4、SL5は非調圧状態とされるため、消費流量が少なくなり、小型のオイルポンプ48を採用できるとともにそのオイルポンプ48を回転駆動するエンジン負荷が低減されて燃費が向上する。
(もっと読む)
車両制御装置
【課題】過給遅れを低減できる車両制御装置を提供すること。
【解決手段】排気ガスのエネルギーで過給を行う過給装置15を備える内燃機関10と、複数の摩擦係合要素50の開放と係合の切替えにより、複数の変速段の間で変速段が切替えられる変速装置40とが搭載された車両を制御する車両制御装置1であって、摩擦係合要素に作用させる油圧の制御が可能な油圧制御手段と、電力を消費して過給をアシストするアシスト手段19とを備え、過給遅れが生じると判定された場合に、アシスト手段による過給のアシストを行い、過給遅れが生じると判定された場合であって、ダウンシフト判定がなされ、かつダウンシフトに伴う運転状態の変化が所定の条件を満たすと予測される場合には、アシスト手段の過給アシストに代えて、ダウンシフト時に開放側の摩擦係合要素に作用させる油圧を、過給遅れが生じると判定されない場合と比較して、推定過給遅れに応じて低減する。
(もっと読む)
車両用無段変速機の制御装置
【課題】副変速機構の解放側摩擦締結要素の発熱量を抑制する。
【解決手段】車両用無段変速機の制御装置であって、車両の運転状態に基づいて達成すべき無段変速機構20及び前副変速機構30の全体の変速比を到達変速比として設定する到達変速比設定手段と、全体の変速比が前記到達変速比となるように無段変速機構20の変速比及び副変速機構30の変速段の一方又は双方を制御する変速制御手段と、車両用無段変速機に入力されるトルクが負トルクのときに副変速機構30の変速段を第1変速段から第2変速段に変更する過程で実施されるイナーシャフェーズ中に、副変速機構20の解放側摩擦締結要素のトルク容量を略ゼロに制御するトルク容量制御手段と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】電気無段変速機と直列に機械有段変速機を連結した駆動系に有する半締結可能要素の伝達トルク精度を高める学習を行い、学習結果を機械的な変速制御に使うことにより、運転フィーリングの向上を図ること。
【解決手段】第1モータジェネレータ3、第2モータジェネレータ5とエンジン1が接続される遊星歯車を有し、無段変速比を得る電気無段変速機10と、電気無段変速機10の出力側に接続され、締結要素として摩擦クラッチ7を有し、複数の有段変速比を得る機械有段変速機6と、機械有段変速機6の変速過渡期、摩擦クラッチ7のスリップ締結状態を保ちながら変速する。このハイブリッド車両において、モータ/エンジンの運動方程式と遊星歯車の運動方程式に基づいて、スリップ締結状態における摩擦クラッチ7への指令値と伝達トルクとの関係を学習する学習制御手段(図4)を設け、変速制御手段(図5)は、学習制御手段(図4)による学習結果に基づいて機械有段変速機6の変速制御を行う。
(もっと読む)
車両用無段変速機の制御装置
【課題】変速時の運転性能を向上させる。
【解決手段】無段変速機構20と、副変速機構30と、を備える車両用無段変速機4の制御装置であって、車両用無段変速機4に入力されるトルクが負トルクのときに副変速機構30の変速段を第1変速段から第2変速段に変更する過程で実施され、副変速機構30の摩擦締結要素の締結容量を制御して副変速機構30の入力回転変化速度を調整するイナーシャフェーズ処理の指示を、その副変速機構30の入力回転速度が第2変速段の入力回転速度に実際に到達する前に終了させるイナーシャフェーズ処理終了手段(S3)と、イナーシャフェーズ処理の指示を終了させた後、副変速機構30の入力回転速度が第2変速段の入力回転速度に実際に到達する前にその副変速機構30の締結側摩擦締結要素の締結容量を増大させるトルクフェーズ処理の指示を開始するトルクフェーズ処理開始手段(S5)と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】走行中のエンジン始動制御時、車両駆動力の制御性悪化を防止して滑らかな車両駆動力特性を実現することにより、運転者に与える違和感を抑えること。
【解決手段】エンジンEngと、モータ/ジェネレータMGと、モータ/ジェネレータMGと左右後輪RL,RRとの間に設けられた自動変速機ATと、モータ/ジェネレータMGと左右後輪RL,RRとの間に設けられ、エンジン始動制御域でスリップ制御される摩擦要素と、を備えている。このFRハイブリッド車両において、エンジン始動制御手段(図6)は、エンジン始動要求時、エンジン始動制御域でスリップ制御される摩擦要素として、エンジン始動制御と変速制御が同時処理されても締結・解放されない摩擦要素を第2クラッチCL2として選択し(S2)、第2クラッチCL2によるスリップ制御中、要求される目標駆動トルクを達成するように継続的に第2クラッチCL2のトルク容量を制御する(S7,S9,S11,S13)。
(もっと読む)
車両の制御装置
【課題】有段変速機の変速過渡期に駆動力保障を確保し、トルク抜けを防止することができる車両の制御装置を提供する。
【解決手段】駆動系に、エンジン1,第2モータジェネレータ5及び駆動輪32,32と、高速段にて締結する摩擦クラッチ7と、低速段にて締結するドグクラッチ8と、を変速要素として有する有段変速機6と、を備え、変速要求時、ドグクラッチ8の断接指令を出力すると同時に、摩擦係合要素7をスリップ締結する変速制御手段を備えた車両の制御装置において、ドグクラッチ8の断接状態を検出するドグクラッチフォーク位置スイッチFを有し、変速制御手段は、ドグクラッチ8を断接するために摩擦係合要素7をスリップ締結するときの摩擦係合要素の油圧目標値Thtと、ドグクラッチ8が実際に断接したときの摩擦係合要素7への油圧指令値Tho*との差に基づいて、次回変速制御時における摩擦係合要素7への油圧指令開始値Thsを補正する。
(もっと読む)
無段変速装置
【課題】円滑な走行、減速、停止を実現する。
【解決手段】トロイダル型無段変速機10,11,12,14と、遊星歯車式変速機5と、第一及び第二のクラッチから成るクラッチ装置6と、これら各クラッチの断接状態を切り換える制御器16とから成る無段変速装置であって、制御器16が、制動装置の作動を条件にクラッチ装置6の接続すべきクラッチの締結圧を、その時点の運転状況に応じた必要最小限の動力を伝達できる値に調節する。これにより制動時の急なトルク変動を、上記クラッチ装置6を滑らせる事により吸収することができる。
(もっと読む)
電動車両の制御装置
【課題】走行シーンに応じて駆動力制御と変速制御の間で適切に優先付けすることで、走行シーンにかかわらずシステム保護と運転性向上のバランスを図ることができる電動車両の制御装置を提供すること。
【解決手段】電動機を含む複数の動力源と、電気無段変速機10と、摩擦クラッチ7を有する機械有段変速機6と、駆動力制御手段と、機械有段変速機6の変速制御手段と、を備えている。このハイブリッド車両において、駆動力の増減情報と車速の増減情報を取得し、駆動力指令と変速指令の同時出力時であり、かつ、駆動力と車速のうち少なくとも一方が増加する場合、駆動力制御より変速制御を優先する制御を行い、駆動力指令と変速指令の同時出力時であり、かつ、駆動力と車速のうち少なくとも一方が減少する場合、変速制御より駆動力制御を優先する制御を行う駆動力/変速協調制御手段を設けた。
(もっと読む)
自動変速機の摩擦係合要素の劣化診断装置
【課題】変速段が形成不能となる少し前のタイミングで劣化した摩擦係合要素を検出するなど、摩擦係合要素の所定の劣化度合いを精度良く検出することを可能とする。
【解決手段】パワーオンアップシフト時に、解放側クラッチに供給する油圧をNT吹き量に基づいて学習補正し、係合側クラッチに供給する油圧をイナーシャ相の勾配に基づいて学習補正する。係合側クラッチに供給する油圧の学習値が第2閾値X1以上であり(ST31:YES)、且つ、解放側クラッチに供給する油圧の学習値が第1閾値X2以上(ST32:YES)である場合に、係合側クラッチが劣化していると診断する(ST33)。係合側クラッチに供給する油圧の学習値が第4閾値X1未満であり(ST31:NO)、且つ、解放側クラッチに供給する油圧の学習値が第3閾値X3以上である場合に(ST34:YES)、解放側クラッチが劣化していると診断する(ST35)。
(もっと読む)
車両用自動変速機の油圧制御装置
【課題】電磁弁装置の消費電力を抑制しつつ、摩擦係合装置への係合油圧の応答性を安定させる。
【解決手段】自動変速機10の所定のギヤ段GSを維持する非変速時には、油圧制御手段104によりギヤ段GS形成に関与する摩擦係合装置への係合油圧PCの設定がライン油圧PLより所定油圧C分高くされるので、その摩擦係合装置への係合油圧PCとしてライン油圧PL同等の油圧を得る為に摩擦係合装置への係合油圧PCの設定としてライン油圧PL相当が設定されることと比較して、所定油圧C分の油圧余裕が設けられている分、非変速時(定常状態)から変速状態に移行した際の変速応答性(油圧応答性)のばらつきが抑制される。加えて、その応答性のばらつきを低減する為に摩擦係合装置への係合油圧PCの設定を最大油圧PCmaxとすることと比較して、リニアソレノイドバルブSLの消費電力が抑制される。
(もっと読む)
車両用自動変速機の油圧制御装置
【課題】電磁弁装置の消費電力を抑制しつつ、摩擦係合装置への係合油圧の応答性を安定させる。
【解決手段】自動変速機10の変速時には、油圧制御手段104により解放側摩擦係合装置の解放制御の開始に先立って解放側摩擦係合装置への係合油圧PCの設定が非変速時における係合油圧PCの設定より第1所定期間T(1)だけ一時的に第1所定油圧C(1)分高くされるので、解放側摩擦係合装置への係合油圧PCとして非変速時の油圧がそのまま設定されることと比較して、第1所定油圧C(1)分の油圧余裕が設定されている分、変速時に解放側摩擦係合装置の解放制御を開始した際の変速応答性(油圧応答性)のばらつきが抑制される。加えて、応答性のばらつきを低減する為にギヤ段GS形成に関与する摩擦係合装置への係合油圧PCの設定を非変速時にも第1所定油圧C(1)分高く設定することと比較して、リニアソレノイドバルブSLの消費電力が抑制される。
(もっと読む)
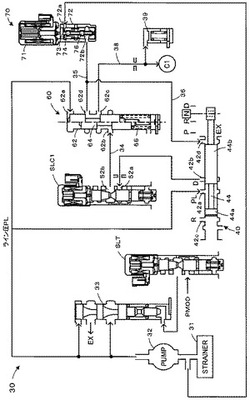
補助ポンプ駆動制御装置
【課題】補助ポンプの小型化が可能で、車載性および重量の点で有利な補助ポンプ駆動制御装置を提供すること。
【解決手段】エンジンにより駆動されてコントロールバルブユニット13に油圧を送るメカオイルポンプOP1と、エンジンEとは異なるポンプ駆動源により駆動され、補助吸入油路31を介してオイルを吸引し、コントロールバルブユニット13に補助吐出油路32を介して油圧を送る電動オイルポンプOP2と、補助吐出油路32とオイル貯留部12aとを接続した副吸入油路40と、電動オイルポンプOP2の駆動を制御し、電動オイルポンプOP2の駆動開始時には、電動オイルポンプOP2を逆転駆動させる駆動準備処理を実行する補助ポンプ駆動制御手段と、を備えていることを特徴とする補助ポンプ駆動制御装置とした。
(もっと読む)
121 - 140 / 621
[ Back to top ]