
Fターム[3J552VA17]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 伝動装置からの情報 (9,884) | 無段変速機 (614) | ベルト式 (427) | プーリ位置 (52)
Fターム[3J552VA17]に分類される特許
1 - 20 / 52
無段変速機の変速制御装置及びその変速制御方法
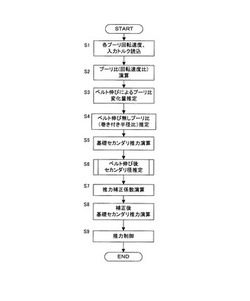
【課題】駆動ベルトの伸びを考慮した場合にセカンダリプーリの推力が必要以上に高く設定されることを防止する。
【解決手段】本発明は、無段変速機の変速制御装置であって、駆動力伝達部材13の伸びによる各プーリ11、12の回転速度比の変化量を推定する回転速度比変化量推定手段S3と、入力トルクと回転速度比の変化量とに基づいて、伸び無しプーリ比を推定する伸び無しプーリ比推定手段S4と、入力トルクと伸び無しプーリ比とに基づいて、セカンダリ推力を演算するセカンダリ推力演算手段S5と、駆動力伝達部材13の伸びによるセカンダリプーリ12と駆動力伝達部材13との接触半径の変化量を推定する接触半径変化量推定手段S6と、セカンダリ推力を接触半径の変化量に基づいて補正し、補正後セカンダリ推力を演算する補正後セカンダリ推力演算手段S8と、補正後セカンダリ推力に基づいて推力を制御する推力制御手段S9と、を備える。
(もっと読む)
ベルト式無段変速機

【課題】既存部品と可動シーブに作用する力を利用し、コスト増を招くことなく変速比ロック機能を発揮させること。
【解決手段】ベルト式無段変速機は、プライマリプーリ42と、セカンダリプーリ43と、ベルト44と、ボール14,14と、カッター切り上がり円弧溝15と、ロック固定用スナップリング16と、ロック解除用スナップリング17と、を備える。ロック固定用スナップリング16は、可動シーブ筒状軸42fが最ハイ変速比によるロック位置へ向かうとき、プライマリ可動シーブ42bが受ける油圧推力に基づきボール14,14に締結力を入力する。ロック解除用スナップリング17は、可動シーブ筒状軸42fが最ハイ変速比のロック位置から離れるとき、プライマリ可動シーブ42bが受けるベルト反力に基づきボール14,14に解除力を入力する。
(もっと読む)
無段変速機の制御装置
【課題】無段変速機が搭載された車両において、車両発進時の変速制御にオーバーシュートが発生することを抑制する。
【解決手段】車両発進時の目標入力回転数を先読みし、変速制御を早く開始させるためのフィードフォワード制御量を変速速度と変速機の入力トルクとに基づいて算出し、その算出したフィードフォワード制御量に基づいて車両発進時にフィードフォワード制御を実行することで車両発進時(変速開始時)の変速油圧を大きくする。このような制御によりフィードバック制御のみを実行する場合よりも変速開始を早くすることが可能となり、これによって車両発進時の最大変速比γmaxとしてハード的最LOWを用いている無段変速機において、車両発進時の変速制御にオーバーシュートが発生することを抑制することができる。
(もっと読む)
センサ
【課題】軸回りに回転する測定対象物の軸方向位置を適用かつ容易にコストをかけずに検出することが可能なセンサを提供すること。
【解決手段】回転軸回りに回転しつつ軸方向へ変位する測定対象物2の軸方向位置を検出するセンサ1において、第1の要素6と、磁気部材7を有する検出部5とを設け、位置信号の発出のために、線状の相対変位時に第1の要素6と協働しつつ該第1の要素6に対して所定の線状の変位を行う第2の要素8を磁気部材7によって形成し、位置信号の発出のために、特に測定対象物2による線状の相対変位によって第2の要素8を非接触に連行するよう構成した。
(もっと読む)
油圧制御装置およびベルト式無段変速機の制御装置
【課題】応答性を向上させつつ、油圧室を目標圧に収束させることのできる油圧制御装置を提供する。
【解決手段】開閉弁は、油圧室に圧油を供給するための増圧用開閉弁と前記油圧室から圧油を排出するための減圧用開閉弁とを有し、増圧する場合には目標圧となるように前記増圧用開閉弁を開弁動作させ、目標圧よりも相対的に低く設定された閾値まで実際の圧力が上昇したのちに閉弁動作させ、減圧する場合には目標圧となるように前記減圧用開閉弁を開弁動作させ、目標圧よりも相対的に高く設定された閾値まで実際の圧力が下降したのちに閉弁動作させる。
(もっと読む)
車両用ベルト式無段変速機の制御装置
【課題】駆動状態と被駆動状態との切り換わりに際し、出力における応答の遅れが低減される車両用ベルト式無段変速機の制御装置を提供する。
【解決手段】切換時挟圧力制御手段132は、伝動ベルト48におけるエレメント間圧縮力の発生する箇所(エレメント圧縮箇所)が車両用駆動装置10の駆動状態および被駆動状態の一方から他方への切換え前後で維持されるようにベルト挟圧力を制御するので、上記駆動状態と上記被駆動状態との切換えの際に伝動ベルト48における上記エレメント圧縮箇所の移動が生じることがなくなり、出力における応答の遅れが低減される。
(もっと読む)
巻掛伝動装置における巻掛部材の張力設定のためのシステム
【課題】ベルト張力の実際の要求に対する適合化の際の最適化を図ること。
【解決手段】巻掛伝動装置の入力側に作用するトルクを表わすトルク量がコンバータロックアップクラッチが解離されている場合には第1の計算で求められたスリップ量に依存して求められ、係合されている場合には、第2の計算で求められたエンジントルク量に依存して求められ、第1の計算の際にトルクコンバータのトルク信号がコンバータロックアップクラッチの解離のもとで形成され、第2の計算の際に前記エンジントルク量を表す値が形成され、コンバータロックアップクラッチの係合中に前記トルク量の計算のために平滑的に前記第1の計算で形成されたトルク信号と第2の計算で形成された値からの最大値が用いられ、張力の設定が前記トルク量に依存して行われる。
(もっと読む)
Vベルト式無段変速機搭載車のベルトスリップ時駆動力制御装置
【課題】ベルトスリップ制御時における駆動力低下を補償し得るようにした動力源出力トルク制御を提案する。
【解決手段】演算部51ではエンジン性能マップを基に、エンジン回転数Neおよびアクセル開度APOから要求エンジントルクTe*を求める。除算器52ではプーリ回転比λをベルト巻き付き半径比iで除算することにより除算値(λ/i)を求める。λはベルトスリップ制御中も変速制御により目標変速比に保たれるが、iはベルトスリップ分だけ低下する。非ベルトスリップ中はiが低下せず、i=λのため、除算値(λ/i)は1であり、ベルトスリップ制御中はiの上記低下により、除算値(λ/i)は1よりも大きな値となる。乗算器53では、要求エンジントルクTe*に除算値(λ/i)を掛けて目標エンジントルクtTeを求め、これをエンジンの出力制御に資する。よって、ベルトスリップ制御中はエンジントルクが(λ/i)>1により増大され、ベルトスリップ制御時における駆動力低下を補償し得る。
(もっと読む)
無段変速機の制御装置
【課題】セカンダリプーリにキャンセル油室を備える無段変速機において目標セカンダリ圧を適切に設定する。
【解決手段】駆動チェーンの張力を制御するセカンダリプーリには、セカンダリ圧が供給される油圧室と、この油圧室に対向するキャンセル油室とが形成される。キャンセル油室から作動油が排出されるダウンシフト時には、セカンダリプーリの目標ストローク速度Vsおよび実ストローク速度Vs’が算出される。次いで、補償圧算出部93は、目標ストローク速度Vsと実ストローク速度Vs’とのうち高い方の速度Vs,Vs’と、キャンセル油室に供給される作動油の温度TOILとに基づいて、キャンセル油室に生じる抵抗圧を推定するとともにこの抵抗圧に基づくバランス補償圧Pbを算出する。そして、目標セカンダリ圧補正部83は、目標セカンダリ圧Pstにバランス補償圧Pbを加算して補正後の目標セカンダリ圧Pst’を算出する。
(もっと読む)
Vベルト式無段変速機の変速比演算装置
【課題】プーリの可動シーブ位置センサによる検出値から求まるベルト巻き付き径を基に演算した変速比を、センサ取り付け位置の誤差などがあっても正確なものにする。
【解決手段】可動シーブ位置センサ検出値対応変速比iがプーリ回転センサ検出値対応変速比λ(プーリ回転比)に対し図示のごとくに乖離する場合、先ず変速比領域A〜Dごとに、両者間の変速比偏差(i−λ)の平均偏差を算出し、この平均偏差を基に線形補間を行って図示のごとき変速比補正量Δiaveを求める。次いで、可動シーブ位置センサ検出値対応変速比iを、これに上記の変速比補正量Δiaveを加算して校正(補正)することにより、最下段に破線で示す校正(補正)後の可動シーブ位置センサ検出値対応変速比を求める。かかる校正(補正)により可動シーブ位置センサ検出値対応変速比iが、実際の変速比を表す回転センサ検出値対応変速比(プーリ回転比)λに一致する。
(もっと読む)
ベルト式無段変速機
【課題】ベルト式無段変速機において、簡易な構造で小型化に対応することができ、実際の変速比を正確に検出することができるようにする。
【解決手段】ベルト式無段変速機30は、可動シーブ34bの外周端部34eに形成された測定面34hと、外周端部34eに離隔して設けられた変位センサ90であって、測定面34hと変位センサ90との間の距離を測定する変位センサ90とを有する。測定面34hは、可動シーブ34bが軸方向に移動するにつれて、測定面34hと変位センサ90との間の距離Hが変化するように形成される。
(もっと読む)
自動二輪車
【課題】ベルトの滑りを検知するための処理において異常が生じた場合に、ベルトの滑りを抑えることのできる自動二輪車を提供する。
【解決手段】自動二輪車には、無段変速機の変速比を制御するとともに、エンジンの駆動を制御する制御装置とが設けられる。制御装置14Cは、ベルトの滑りが発生したか否かを判定する滑り判定部14cと、滑り判定部の処理における異常の発生を判定する異常判定部14dとを有する。また、制御装置12Cは、滑り判定部の処理における異常が発生したと判断された場合とに、エンジンが出力するトルクを抑える処理を実行するトルク制限処理部12bを有する。
(もっと読む)
ベルト式無段変速機の制御装置
【課題】ベルト式無段変速機のプライマリ推力を直接的に制御することによって変速制御を行なう場合に、変速制御を精度よくかつ簡易に実現する。
【解決手段】ベルト式無段変速機の変速制御を行なうECUは、目標変速比γtをプライマリプーリの目標シーブ位置etに変換し、回転速度センサの検出値を用いて算出した実変速比γをプライマリプーリの実シーブ位置eに変換し、推力マップを参照して目標シーブ位置etと実シーブ位置eとの偏差に対応するフィードバック推力ΔWinを算出し、フィードフォワード推力Winにフィードバック推力ΔWinを加えた値を、プライマリ目標推力Wintgtとして算出し、プライマリ目標推力Wintgtに応じた指令信号をプライマリ圧力制御用リニアソレノイドに出力する。
(もっと読む)
Vベルト式無段変速機のベルトスリップ率演算装置
【課題】Vベルトスリップ率の演算に際し、既存するプーリ回転センサの検出値のみを用いて、センサの新設なしに当該演算を行い得るようにする。
【解決手段】S21で最ハイ変速比選択状態と判定するとき、S22で工場出荷時にメモリしておいた無負荷&最ハイ時プーリ回転比λoを読み込み、S23で現在のプライマリプーリ回転数Npriおよびセカンダリプーリ回転数Nsecから実プーリ回転比λ=Npri/Nsecを算出し、S24で最ハイ時ベルトスリップ率SLip={(λ−λo)/λo}×100%を演算する。S25で、このベルトスリップ率SLipおよび最ハイ時目標ベルトスリップ率SLip*間の偏差ΔSLipを求め、S26,S27で、最ハイ変速比を保ってΔSLip=0にするのに必要な目標プライマリプーリ圧Ppri*を求めると共に、プライマリプーリ圧Ppriとしてそのまま用いるライン圧PLが目標プライマリプーリ圧Ppri*に一致するような駆動デューティーをライン圧制御弁に出力する。
(もっと読む)
Vベルト式無段変速機のベルトスリップ状態判定装置
【課題】Vベルトの挟圧時におけるプーリの変形に伴うベルト巻き付き半径の変化を考慮して、実際に近いベルトスリップ率を求め、これが適正値になるよう制御する。
【解決手段】理論的なベルト巻き付き半径比λboと、プーリ回転比λpとから、ベルトスリップ率SLipを求めるものを前提とするが、理論的なベルト巻き付き半径比λboをそのまま用いず、これを補正係数Kpの乗算により補正して得られる補正済ベルト巻き付き半径比λbを用いる。補正係数Kpは、Vベルトの挟圧時におけるプーリの変形に伴うベルト巻き付き半径の変化で理論的なベルト巻き付き半径比λboが実際のベルト巻き付き半径比からずれるため、このずれを無くして補正済ベルト巻き付き半径比λbを実際のベルト巻き付き半径比に一致させるような係数とする。このλbを用いてベルトスリップ率SLipを求めることで、このスリップ率SLipが実際値に一致して、実際のベルトスリップを過不足のない適正値に制御可能である。
(もっと読む)
無段変速機の制御装置
【課題】無段変速機においてアップシフト変速状態の正常判定の実施頻度を多くする。
【解決手段】アップシフト変速指令による変速中に、実変速比RATIOが目標変速比RATIOTをオーバシュートして、アップシフト変速指令(DS1変速Duty出力)からダウンシフト変速指令(DS2変速Duty出力)に切り替わっても、アップシフト変速速度が速い場合、具体的には、最大実シーブ位置変化率DWDRmaxが判定閾値g以上である場合には、アップシフト変速能力があると判断して、アップシフト変速状態が正常であると判定することで、正常判定の実施頻度を多くする
(もっと読む)
無段変速機のベルト劣化判定装置
【課題】ベルトの損傷に至る前の劣化度を経時的に判定するようにした無段変速機のベルト劣化判定装置を提供する。
【解決手段】入力トルクとプーリの入力軸回転数とレシオなどに基づいて無段変速機のリングの劣化度を算出し、エレメントのクランプ力とエレメントの押し力などに基づいてエレメント荷重を算出すると共に、それに基づいてエレメントの劣化度を算出し(S10)、算出されたリングの劣化度あるいはエレメントの劣化度が設定しきい値を超えるとき、それを積算し(S12からS16)、積算された劣化度が設定許容値を超えるとき、警告を含む所定の動作を実行する(S18からS20)。
(もっと読む)
無段変速機
【課題】最減速段に切り替えた際に、ベルトが正確に所定の位置に変位して、最減速段を良好に構築することができる無段変速機を提供する。
【解決手段】無段変速機100は、プライマリシャフト200と、固定シーブ260および、固定シーブ260に対して進退可能に設けられた可動シーブ270を含むプライマリプーリ250と、セカンダリシャフト300と、固定シーブ360および、固定シーブ360に対して進退可能に設けられた可動シーブ370を含むセカンダリプーリ350と、プライマリプーリ250およびセカンダリプーリ350間に亘って設けられ、プライマリプーリ250およびセカンダリプーリ350間で動力を伝達可能なベルトと、プライマリシャフト200に設けられ、ベルトと接触可能な第1摩擦材および、セカンダリシャフト300に設けられ、ベルトと接触可能な第2摩擦材の少なくとも一方と備える。
(もっと読む)
電子制御式無段変速機を備えた車両
【課題】安定した変速比を得ることが可能であり、且つ、運転者の意図する円滑な発進が可能な車両を提供する。
【解決手段】エンジンと、固定シーブ体と可動シーブ体とを有する変速装置と、前記エンジンの駆動力が伝達される駆動輪と、前記可動シーブ体を移動させるモータと、前記モータを制御するECU7と、前記可動シーブ体の位置を検出するシーブ位置センサ40と、メインスイッチ33とを備え、ECU7は、前記可動シーブ体の原点位置P0を記憶するメモリ7bと、走行状態判定部131と、メインスイッチ33がOFFされ、かつ前記エンジンの駆動力が前記駆動輪に伝達されていないことが検出または推定された場合に、原点位置P0への移動を制御する原点位置移動部121と、シーブ位置センサ40によって検出された新たな原点位置P0´をメモリ7bに記憶させる原点位置設定部122とを備えた車両。
(もっと読む)
車両用無段変速機の制御装置
【課題】ベルト戻り不良に起因して車両の発進性が悪化することを抑制することのできる車両用無段変速機の制御装置を提供する。
【解決手段】車両用無段変速機10は、エンジン2からの駆動力が入力される入力側プーリ13及び車両の駆動輪7R,7Lに駆動力を出力する出力側プーリ14に対して印加される油圧に応じてこれらプーリ13,14の有効径を変更することにより変速比γを変更する。電子制御装置8は上記油圧を制御する。また、伝動ベルト15が無段変速機10の最大変速比γmaxに対応する位置に戻っていない状態であるベルト戻り不良が生じているか否かを判定するとともに、ベルト戻り不良が生じている旨判定されたときには、ガレージ操作に先立って、伝動ベルト15が最大変速比γmaxに対応する位置に戻されるように出力側プーリ14に供給される油圧を増大する強制ベルト戻し制御処理を行う。
(もっと読む)
1 - 20 / 52
[ Back to top ]