
Fターム[3J552VD14]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 運転者情報,操作情報 (2,942) | ハンドル操作(舵角) (84)
Fターム[3J552VD14]に分類される特許
1 - 20 / 84
自動クラッチ制御装置
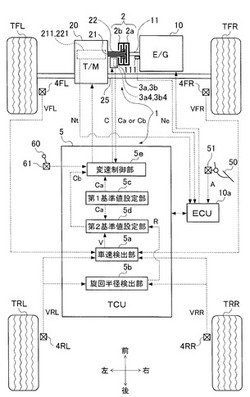
【課題】車両の旋回走行中に変速機の変速が行われるときに、車両の旋回走行の状況に応じて、運転者の運転嗜好に合った良好なユーザフィーリングが得られる変速を行うことが可能な自動クラッチ制御装置を提供する。
【解決手段】自動クラッチ制御装置1は、エンジン10のイナーシャに変速におけるエンジン10の目標回転数変化速度を乗算した目標慣性トルクを演算し、エンジン10の現出力トルクから目標慣性トルクを減算した値を、第1、第2クラッチ2a、2bの目標伝達トルクとして演算し、目標伝達トルクが得られる第1、第2クラッチ2a、2bの第1係合量基準値Caを設定する第1基準値設定部5cと、車速V及び旋回半径Rに基づいて第1係合量基準値Caを補正して第2係合量基準値Cbを設定する第2基準値設定部5dとを備えている。そして、第1、第2クラッチ2a、2bの係合量Cを、車両の直進走行中の変速時において第1係合量基準値Caに制御すると共に、車両の旋回走行中の変速時において第2係合量基準値Cbに制御する。
(もっと読む)
惰行制御装置

【課題】車両の過度な加速を防ぐことのできる惰行制御装置を提供する。
【解決手段】車両惰行時に、エンジンから駆動輪への動力の伝達を切断して燃料消費を低減させる惰行制御装置において、車両惰行時であり、且つ、エンジンから駆動輪への動力が伝達されているときに、前記動力の伝達を切断したときの車両加速度を推定し(ステップS7)、この車両加速度が予め設定した所定値以下のとき前記動力の伝達を切断するコントローラを備えたものである。
(もっと読む)
作業車両
【課題】ラグが大きく、排土性の高いタイヤ又はクローラを備えた作業車両において、ラグによる振動ならびに騒音を抑制することができる技術を提供する。
【解決手段】エンジン2の回転動力によって駆動される無段変速装置31と、前記無段変速装置31によって駆動されるタイヤ4・4・6・6又はクローラ17・17と、前記無段変速装置31を制御することによって前記タイヤ4・4・6・6又はクローラ17・17の駆動状態を変更させる制御装置9と、を備えた作業車両100であって、振動加速度Gを検出するとともに前記制御装置9へ検出信号を送信する振動センサ91を具備し、前記制御装置9は、振動加速度Gが所定の値Glよりも大きい場合に前記タイヤ4・4・6・6又はクローラ17・17のラグRによる振動周波数が所定の固有振動数の共振発生領域にあると判断し、前記無段変速装置31を制御して走行速度Vを変更させる、とした。
(もっと読む)
車両用自動変速制御装置
【課題】追い越し時の変速モード切替操作が不要な車両用自動変速制御装置を提供する。
【解決手段】エコノミーモードとパワーモードを選択する変速モード選択スイッチ2と、車両の加速時に、低ギア段で所定の車速まで加速してから高ギア段にシフトアップする加速性優先変速と前記車速より低い車速にてシフトアップする燃費優先変速とを指定に応じて実施するシフトアップ変速制御部3と、パワーモードが選択されているときは加速性優先変速を指定し、エコノミーモードが選択されており方向指示器4が作動しているときは加速性優先変速を指定し、エコノミーモードが選択されており方向指示器が作動していないとき燃費優先変速を指定する変速指定部5とを備える。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
船外機の制御装置
【課題】変速機とトリム角を調整可能なトリム角調整機構とを備えると共に、転舵によって生じるキャビテーションを抑制してスムーズに旋回できるようにした船外機の制御装置を提供する。
【解決手段】変速機とトリム角θを調整可能なトリム角調整機構(パワーチルトトリムユニット)とを備える船外機の制御装置において、変速機で2速が選択されていると共に、エンジンのスロットル開度の変化量が所定値以上のとき、2速から1速に変速するように変速機の動作を制御し(時刻t1)、エンジン回転数NEが所定回転数NE3以上のとき、トリムアップを開始してトリム角θが所定角度(2速用学習トリム角δ)となるようにトリム角調整機構の動作を制御すると共に(時刻t2)、転舵が開始されるとき、転舵角αに応じてトリム角θが減少するようにトリム角調整機構の動作を制御する(時刻t5)。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車両の制御装置
【課題】エンジンの動力を自動変速機を介して車輪側に伝達する車両の燃費を効果的に向上させる。
【解決手段】車両の走行中にアクセルオフ(アクセルペダルの踏込量が0)の期間が所定期間以上継続したときに、自動変速機42をニュートラル状態(動力伝達しない状態)にするニュートラル走行を許可する。これにより、車両の減速走行中(アクセルオフでの走行中)にニュートラル走行を実行してエンジン11の負荷を軽減する。但し、ニュートラル走行の実行前に所定の移行禁止条件が成立した場合には、ニュートラル走行への移行を禁止して、自動変速機42を非ニュートラル状態(動力伝達可能な状態)に維持する。一方、ニュートラル走行の実行中に所定の実行停止条件が成立した場合には、自動変速機42を非ニュートラル状態に戻して、ニュートラル走行を停止する。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車両駆動力制御装置
【課題】 登坂路等の走行環境が変化した場合であっても、ドライバーの意図する加速感が得られ、かつ燃費を向上させる車両駆動力制御装置を提供する。
【解決手段】 本発明の車両駆動力制御装置は、アクセル開度に基づきアクセルペダル踏み込み開始後の経過時間を算出する経過時間算出手段と前記アクセル開度と駆動力との関連特性に基づいて第1の駆動力を算出し、前記第1の駆動力を基準値として、前記経過時間の増加量に伴って漸次減少する第2の駆動力を算出する駆動力算出手段と前記第1の駆動力または第2の駆動力のうち、いずれの駆動力を目標駆動力とするかを判定する目標駆動力判定手段と少なくとも前記目標駆動力判定手段により得られた目標駆動力に基づいて駆動力操作量を算出する駆動力操作量算出手段と前記駆動力操作量に基づいて前記駆動力源の駆動力を制御する駆動力制御手段とを備える。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
車両用自動変速機の制御装置
【課題】旋回中の変速動作を適切に設定できる車両用自動変速機の制御装置を提供すること。
【解決手段】車両は、車両の前後方向の加速度を検出する前後加速度検出手段と、車両の幅方向の加速度を検出する横加速度検出手段とを具えている。自動変速機の制御装置は、ハンドル操舵角と車速から推定横加速度を算出する推定横加速度算出手段と、推定横加速度の値と横加速度の値との差である横加速度偏差を算出する横加速度偏差算出手段を具えている。ある前後加速度の値と横加速度の値とからなる加速度状態が、変速禁止を行う状態か否かを判定する判定値を横加速度偏差に応じて補正する変速禁止領域補正手段を具えている。これにより、アップシフトが禁止される領域を補正し、補正された変速禁止領域を用いて自動変速機を制御する。
(もっと読む)
駆動装置の油圧制御装置
【課題】電動オイルポンプの高圧運転の頻度を低減するとともに消費電力の低減が可能な駆動装置の油圧制御装置を提供する。
【解決手段】油圧ブレーキ60A、60Bと電動オイルポンプ70との間に設けられ、設定油圧を低圧油圧PLと高圧油圧PHに切替可能な切替機構73fを有するレギュレータ弁73と、ポンプ油路72とブレーキ油路75を連通・遮断するブレーキ制御弁74と、レギュレータ弁73の設定油圧の切替を行なうとともにブレーキ制御弁74の連通・遮断を制御する切替制御弁77とを備え、一方向クラッチが開放する方向の動力を伝達するため油圧ブレーキ60A、60Bを係合させるとき、ブレーキ制御弁74を開いてポンプ油路72とブレーキ油路75を連通させ、油圧ブレーキ60A、60Bを開放させるとき、ブレーキ制御弁74を閉じてポンプ油路72とブレーキ油路75を遮断させる制御手段と、を備える。
(もっと読む)
車両制御装置
【課題】ドライバーに制御の遅延による違和感を与えず、又、路面摩擦係数が低下した場合に於いても減速力過多により車両が不安定に陥ることがなく、従来の装置よりも高性能でかつ設計時に於いてもマッチングが容易な車両制御装置を提供する。
【解決手段】
ドライバーの旋回動作により前輪に発生するセルフアライニングトルクを検出し、このセルフアライニングと車速から演算した推定舵角を基に変速比制御を行うことで、ドライバーに制御遅延による違和感を与えず、路面摩擦係数が低下した場合に於いても減速力過多により車両が不安定に陥ることがなく、従来の装置に比して高性能でかつ設計時に於いてもマッチングが容易となるようにした。
(もっと読む)
変速比制御装置
【課題】旋回時に過度のシフトダウンで車両が不安定になる場合があった。
【解決手段】走行状態検出手段1からの情報と旋回状態検出状態2の情報に基づき旋回時の目標変速比を設定する旋回時目標変速比設定手段3と、車両挙動不安定の場合における目標変速比を設定する車両不安定時目標変速比設定手段5とを有し、車輪の挙動が安定か不安定を判定する車両挙動判定手段4が安定と判定した場合は、旋回時目標変速比設定手段3からの目標変速比で、車両挙動判定手段4が不安定と判定した場合は、車両不安定時目標変速比設定手段5からの目標変速比で変速機20を制御することにより、車両が不安定になることを防止する。
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
歩行型車両
【課題】コストの上昇を抑制しつつ急旋回を防止して狙いとする旋回ラインが容易に得られる歩行型車両を提供する。
【解決手段】
車両1が所定速度以上で走行している際に、旋回操作子33が左方又は右方に旋回操作されたとき、該車両1を減速させる旋回時減速機構55を備えた。
(もっと読む)
車両の駆動力制御装置及び車両のジェネレータダイオードの冷却方法
【課題】発電機のジェネレータダイオードの温度上昇を適切に抑制する。さらに、冷却媒体の流量を増加させるためのエンジン回転数の変化を自車両の走行状態に適合させて行う。
【解決手段】車両の駆動力制御装置は、ジェネレータダイオードの冷却の要否の判定をし(ステップS2)、その結果、ジェネレータダイオードの冷却が必要であると判定した場合、ジェネレータダイオードを冷却するために要求される目標エンジン回転数を取得し(ステップS3)、その取得した目標エンジン回転数にする自動無段変速機の変速比を取得し(ステップS4)、舵角変化率の絶対値を基に、自動無段変速機の変速比を変化させる速度を設定し(ステップS6〜ステップS13)、取得した変速比に、その設定した速度で変化させる変速制御をする(ステップS14)。
(もっと読む)
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
自動変速機制御装置
【課題】簡易MモードからDモードに戻る際の変速速度を一定に設定すると、車両の様々な走行状態に対応することができず、運転者に違和感を与えることが避けられなかった。
【解決手段】セレクトレバーのDレンジ選択による自動変速モードと、セレクトレバーの手動操作による手動変速モードと、セレクトレバーのDレンジ保持中に、セレクトレバー以外からのシフト信号を受けて変速段を一時的にシフトさせる簡易手動変速モードとを備えた自動変速機制御装置において、簡易手動変速モードから自動変速モードに移行する際の自動戻り変速速度を、車両の走行状態に応じて変更する変速速度調整部16を有する。
(もっと読む)
1 - 20 / 84
[ Back to top ]