
Fターム[3J552VE03]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 外部からの情報 (777) | 環境 (553) | 道路状態(降雨,渋滞,カーブ等含む) (499)
Fターム[3J552VE03]の下位に属するFターム
路面傾斜(登坂、降坂) (293)
すべり易さ(例;低μ路) (49)
Fターム[3J552VE03]に分類される特許
141 - 157 / 157
車両用走行抵抗監視装置
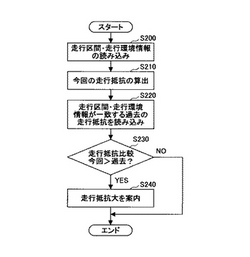
【課題】 本発明は、運転者に対し走行抵抗を抑制するように促す車両用走行抵抗監視装置の提供を目的とする。
【解決手段】 車両に発生する走行抵抗を算出する算出手段と、前記算出手段により算出された走行抵抗を前記車両が走行した区間毎に記憶する記憶手段と、前記算出手段により算出された今回の走行抵抗と前記記憶手段に記憶された過去の走行抵抗とを同一の走行区間同士や同一の走行環境条件(天候等)同士で比較する比較手段と、前記比較手段による比較結果を前記車両の運転者に報知する報知手段とを備えることを特徴とする車両用走行抵抗監視装置。
(もっと読む)
車両の駆動力制御装置

【課題】 凍結等により滑りやすくなっているコーナーでの走行時に、過誤のアクセル操作等により車両がスリップを起こす不具合を回避する。
【解決手段】 車両走行中に前方にコーナーが現れた場合にこれをカーナビゲーションシステム等の道路情報検出手段により検出し、アクセル開度に対する不感帯設定または遅れフィルタ処理を施し、急激なアクセル操作が直接的に車両の駆動力に反映しないようにする。これにより、コーナー走行中に誤って過大なアクセル操作をした場合のスリップ発生の可能性を低減する。
(もっと読む)
車輌用駆動力制御装置
【課題】運転者の減速操作による車輌挙動の安定化と減速操作終了後の車輌応答性の向上
【解決手段】車輌前方の道路状態を検出する前方道路状態検出手段14cと、運転者の減速操作による要求減速度を求める要求減速度算出手段14dと、その道路状態に応じた車輌の目標減速度を設定する目標減速度設定手段14iと、変速機3の変速段を現在よりも低速段側に目標変速段として設定する目標変速段設定手段14hと、要求減速度と目標減速度とを比較して駆動力制御実行要否を判定する駆動力制御実行条件判定手段14jと、要求減速度が目標減速度よりも大きい場合に変速機3を目標変速段へと変速させる変速段制御手段14bと、その変速機3の変速により発生する減速度と車輌の制動力を発生させる制動力発生手段による減速度とを加算したものが要求減速度となるように制動力発生手段の制動力を制御する制動力制御手段14aとを備えること。
(もっと読む)
車両の減速制御装置
【課題】変速機と制動装置の両方を協調して車両を減速制御させる技術を用いるものにおいて、車両を安定した状態で減速させることの可能な車両の減速制御装置を提供する。
【解決手段】車両に制動力を生じさせる制動装置200と変速機10とを協調して制御することにより減速度を発生させる車両の減速制御装置であって、車両の走行安定性を検出、推定又は予測する手段92、118を備え、前記車両の走行安定性が低いと検出、推定又は予測された場合には、前記車両の走行安定性が低いと検出、推定又は予測されない場合に比べて、前記変速機により減速度を発生させる割合を小さくする。前記車両の走行安定性は、路面の摩擦係数や前記車両に作用する減速度の大きさに対応していることができる。
(もっと読む)
変速機の制御装置
【課題】車両のアクセルペダルの反力の大きさが変更されることにより運転者に警報が発せられるに際して、運転者が意図していない変速が行われることが抑制される。
【解決手段】車両のアクセルペダル113から運転者に与えられる力が変えられることにより運転者に警報が発せられるに際して、変速機10を制御する変速機の制御装置であって、前記警報の発生に際してアクセルペダルから運転者に与えられる力が変えられたときには、前記運転者に与えられる力が変えられていないときに比べて、前記変速機が変速され難くなるように前記変速機を制御する。上記において、前記運転者に与えられる力が変えられたときには、前記運転者に与えられる力が変えられていない状態から変わる過渡状態、前記運転者に与えられる力が変わっている定常状態、及び前記警報の発生の終了に際して前記運転者に与えられる力が前記変えられていない状態に復帰した状態が含まれる。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 人工衛星からの電波を受信機で受信することにより、車両の走行経路情報を検出する走行経路情報検出装置と、前記走行経路情報に対応して設定された制御パターンに基づいて前記車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、前記人工衛星からの電波を受信する受信機の受信信号が異常であるか否かを判断するとともに、前記車両が受信機による電波受信に不適当な場所を走行中であるか否かを判断することにより、前記走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11〜S14)と、前記走行経路情報の精度に基づいて前記制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
ナビゲーション装置およびそのプログラムを記憶したコンピュータ読取り可能な記録媒体
【課題】ナビゲーションシステムに記憶されている道路情報に基づいて道路形状を精密に判定する。
【解決手段】ナビゲーションシステム装置に格納されている道路情報から道路形状に関する曲率情報を抽出し、抽出された曲率情報から、先方の道路がワインディング道路か否かを判断する際、曲率情報の他に道路種別や交差点の有無、道幅、直線道路か否か等を考慮して、そのような属性を有する道路については、曲率情報の修正を行い、ワインディング道路判定を精密に行う。
(もっと読む)
自動車のドライブトレイン
本発明は制御装置(16)がドライバ(14)によるトルク出力を第一の最大値又は第二の更に大きい最大値に制限する、自動車のドライブトレイン(10)に関する。本発明の目的は低燃費を可能にするドライブトレインを提供することである。このために制御装置(16)は信号伝送方式で、自動車前方の道路の特性についての情報を供給する道路情報機器(カメラ53)に接続される。このようにして、該制御装置(16)は先行して第一の最大値から第二の最大値に切替え可能であり、又はトランスミッション(19)においてシフト操作を行なうことができる。本発明はまた自動車における前記ドライブトレインの使用に関する。  (もっと読む)
(もっと読む)
無段変速機を備えた車両の制御装置
【課題】 運転者の加速操作に対して加速感が十分に得られる無段変速機を備えた車両の制御装置を提供する。
【解決手段】 制御手段90は、アクセル操作判定手段86によって加速要求が判定されたときは、アクセルペダル71の通常操作時に算出される通常時目標駆動力よりも高い目標駆動力POWER を設定するとともに、その通常操作時に算出される通常時目標回転速度よりも高く且つ車速の増大に対して所定勾配βで増加する加速用目標回転速度NINLINE を設定し、その設定された目標駆動力POWER が達成されるように且つ無段変速機18の入力軸回転速度NINが上記設定された加速用目標回転速度NINLINE となるように無段変速機18の変速比γおよびエンジン12の出力トルクを制御することから、運転者により加速要求がなされたとき、目標駆動力が高められるとともに、動力源の出力回転速度が高められるので、要求出力量に対して車両からの十分に高い加速感が得られる。
(もっと読む)
車両用自動変速機の変速制御装置
【課題】 マニュアル変速スイッチの操作のみでマニュアル変速モードへ切り換えてダウンシフトを行うことができるマニュアル変速操作の容易性を維持しつつ、誤操作による運転者の意に反したマニュアル変速を抑制する。
【解決手段】 シフトレバーがDポジションに保持された自動変速モードの成立時(S4の判断がNO)であっても、ステアリングコラムに配設されたマニュアル変速スイッチが操作判定時間TS以上継続してON操作されると、S5、S7、S8が実行されてマニュアル変速モードに変更され、変速レンジが切り換えられてダウンシフトされる。その場合に、操作判定時間TSは、マニュアル変速モードの成立時に変速レンジを切り換える切換実行時間TKよりも長くされており、誤ってマニュアル変速スイッチに接触しただけでマニュアル変速モードへ切り換わる可能性は低く、誤操作による運転者の意に反したマニュアル変速が抑制される。
(もっと読む)
車両用自動変速機の変速制御装置
【課題】 ステアリングコラムに配設された第2シフトスイッチの操作のみでマニュアル変速を行うことができるマニュアル変速操作の利便性を維持しつつ、誤操作等により意に反したマニュアル変速が行われて運転者に違和感を生じさせることを抑制する。
【解決手段】 第2シフトスイッチが操作されると(S2の判断がYES)、MモードのON、OFFに拘らずレンジ切換が行われる。MモードがOFFの時にS4で設定される切換実行時間TDon1はTDon2、TDon3よりも長く、S5で設定される切換パターン1は長押しや連続操作による連続切換が不可であるため、MモードがONの時にS7、S8で設定される切換態様や、第1シフトスイッチが操作された場合にS10、S11で設定される切換態様に比べてレンジ切換が抑制され、誤操作等でマニュアル変速が行われる可能性が低いとともに、連続ダウン切換が行われないため違和感が軽減される。
(もっと読む)
運転支援装置
【課題】道路情報に基づいて、新しい道路環境に適応するように自車両を走行させ、安全性を向上させること。
【解決手段】車輪の回転速度に対応した信号を検出する車速センサ10、ナビゲーション装置20、及びスロットルバルブの開度を調節するスロットル駆動器40が設けられている。事前登録地点(例えば、制限速度が変更される地点)に自車両が接近した場合、事前登録地点を起点とする道路の制限速度を取得し、自動的に、スロットル駆動器40を用いて、自車両の駆動力を制御することによって、自車両の車速を制限速度まで変更させるようにした。
(もっと読む)
車両用走行制御装置
【課題】アクセルOFFのようなアクセル開度に対応するパラメータに基づいて、変速機を相対的に低速用の変速段又は変速比に変速する動作により、車両の減速制御を行う場合に、アクセル開度に対応するパラメータの変化によるアップシフトによって走行フィーリングが低下することが抑制されることが可能な車両用走行制御装置を提供する。
【解決手段】アクセル開度に対応するパラメータが小さい第1の状態であるとき(ステップS2−N)に、車両の変速機を相対的に低速用の変速段又は変速比に変速する動作(ステップS9)により、前記車両の減速制御を行う車両用走行制御装置であって、前記第1の状態に至る前であって前記第1の状態に比べて前記アクセル開度に対応するパラメータが大きい第2の状態であるとき(ステップS3−Y)に、前記変速機を相対的に高速用の変速段又は変速比に変速する動作が禁止される(ステップS7)。
(もっと読む)
車両の減速制御装置
【課題】前方車両との位置関係を適正にするために変速機と制動装置を協調して制御することで減速度を発生させる場合に、前方車両のロスト時に生じる違和感を抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両X1と前記車両の前方の前方車両X2との位置関係を適正にするために変速機10と制動装置200を協調して制御することで減速度を発生させる車両の減速制御装置であって、前記前方車両を見失う可能性が有ると判定されたときには、前記変速機により発生させる減速度の割合を増やす。前記前方車両を見失う可能性の有無は、前記車両と前記前方車両との距離Lb’と、前記車両の前方のカーブの曲率又は半径Rに基づいて、判定されることができる。また、前記前方車両を見失う可能性の有無は、道路勾配に基づいて、判定されることができる。
(もっと読む)
車両用走行制御装置
【課題】変速点制御として、変速機を相対的に低速用の変速段又は変速比に変速する動作により、車両の減速制御を行う場合に、変速先として、最適な変速段又は変速比が決定されることが可能な車両用走行制御装置を提供する。
【解決手段】車両の変速機10を相対的に低速用の目標変速段又は目標変速比に変速する動作により、前記車両の減速制御を行う車両用走行制御装置であって、前記目標変速段又は目標変速比は、車速、及び前記目標変速段又は目標変速比に変速されたときのエンジン回転数の少なくともいずれか一方に基づいて、決定される。この場合、先行車との車間距離に対応するパラメータ、又はコーナの大きさ又は道路の勾配に対応するパラメータに基
づいて、求めた目標変速段又は目標変速比に対して、車速、及び前記目標変速段又は目標変速比に変速されたときのエンジン回転数の少なくともいずれか一方に基づいて、所定の制限の下で補正を行う。
(もっと読む)
自動車用の自動変速機の、車輪へ加えるトルク設定値の制御方法および制御装置
本発明は、自動車の運転者の意思を表わし、静的成分(Cs)と動的成分(Cd_cond)との2つの成分を含む、車輪へ加える元来のトルク設定値信号の作成過程を含んでなる自動車用動力装置の自動変速機制御方法に関する。設定値信号の動的成分(Cd_cond)は、少なくとも3つの別個のフィルタリング領域の範囲を定める、少なくとも2つの所定の閾値に応じてフィルタされる。第1と第3の上記フィルタリング領域においてはn次のフィルタが用いられ、第2の上記フィルタリング領域においては、元来のトルク設定値信号の上記動的成分(Cd_cond)に最大勾配が適用され、この最大勾配は、所定の入力データに応じて調整可能である。 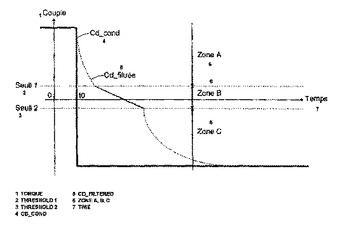 (もっと読む)
(もっと読む)
自動車の1つまたは数個の機能に関する改善した自動制御の方法並びにシステム。
本発明は、陸上自動車の機能に関する改善した自動制御の方法であって、自動車の機能の自動制御と、地上の自動車位置(x,y)の計測と、予め記憶された1つまたは数個の位置に対するその自動車位置の比較とを含む当該方法に関する。前記予め記憶された各位置は、制御自動操作が以前に所定の許容範囲を超える制御を行ったと判定された位置であり、自動車の計測位置が予め記憶された位置のうちの1つと整合する場合には、予め記憶された特殊制御情報が使用され、その制御が前記所定の許容範囲を更にもう一度超えてしまう危険性を低下させる。また本発明は、自動車の1つまたは数個の機能に関する自動制御の評価と、自動制御が前記所定の許容範囲を超える処置を実行したとその評価が示した地上の位置(x,y)の記憶とを更に含む。 (もっと読む)
141 - 157 / 157
[ Back to top ]