
Fターム[3J552VE03]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 外部からの情報 (777) | 環境 (553) | 道路状態(降雨,渋滞,カーブ等含む) (499)
Fターム[3J552VE03]の下位に属するFターム
路面傾斜(登坂、降坂) (293)
すべり易さ(例;低μ路) (49)
Fターム[3J552VE03]に分類される特許
81 - 100 / 157
車両駆動力制御装置
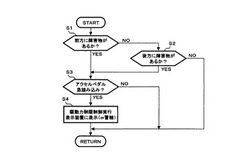
【課題】車両が、前方または後方の障害物と衝突することを確実に回避する。
【解決手段】車両の前部に備えた前方センサの検出結果により、前方に障害物があると、判定されたとき、または、車両の後部に備えた前方センサの検出結果により、後方に障害物があると判定された場合は、急激なアクセルペダルの踏み込みが行われたかを判定し、急激なアクセルペダルの踏み込みがあったと判定されたときは、車両の駆動力制限制御を実行し、表示装置にその旨を表示する。
(もっと読む)
流体伝動装置およびこれが組み込まれた車両の運転制御装置

【課題】エンジンの出力トルク変動に伴って発生するダンパ装置にヒステリシスを与える場合、車両の運転状態に応じて変更できることが望まれる。
【解決手段】入力側回転要素Aと、タービンハブ15を含む出力側回転要素Bと、出力側回転要素Bに連結されるロックアップピストン17を含むロックアップクラッチ装置Cと、ロックアップピストン17に連結されるドライブプレート31およびタービンハブ15に連結されるドリブンプレート32に跨がって配設され、これらの相対回転に伴って弾性変形するコイルばね33を含むダンパ装置Dとを有する本発明のトルクコンバータ10は、一端側がロックアップピストン17に連結される圧縮ばね部材35と、この圧縮ばね部材35の他端側に装着されてドリブンプレート32に押し当たり、ドリブンプレート32との相対回転に伴ってドリブンプレート32に摺接する摩擦部材34とを具える。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
車両の変速制御装置
【課題】ドライバーの意思を十分に反映させて自動変速モードに復帰すること。
【解決手段】手動変速モードと自動変速モードとを切り替え可能な自動変速機32と、車両に搭載され走行路が直線路または曲線路かを判別する横Gセンサ20と、横Gセンサ20の検出結果に基づいて手動変速モードから自動変速モードに切り替えるECU30とを備え、更に視線認識装置26によってドライバーの視線情報を検出し、進行先の曲線路情報を加味することで自動変速モードに復帰するタイミングを制御するようにした。
(もっと読む)
自動変速機の制御装置
【課題】特別な構成要素を追加することなく、警告すべき内容に対応して適切な振動を運転者等の乗員に与えて警告することができる自動変速機の制御装置を提供する。
【解決手段】自動変速機2を搭載した車両の乗員に警告すべき警告条件の発生を判定する警告条件判定手段11と、前記警告条件判定手段11により判定された前記警告条件に対応する警告の内容を判定する警告内容判定手段12と、前記警告内容判定手段12により判定された前記警告の内容に基づいて、複数の係合要素と変速要素との係合状態を、複数の所定の係合状態のうちの何れかに設定された係合状態から前記複数の所定の係合状態以外の係合状態に切換えて前記自動変速機2にトルク変動を発生させるトルク変動発生手段13とを備え、前記発生されたトルク変動により生ずる前記自動変速機2の振動に基づき前記乗員に警告を与える。
(もっと読む)
自動変速機のモード切り替え制御装置
【課題】手動変速モードから自動変速モードへの自動復帰を、車速の如何にかかわらず常時違和感のないタイミングで行わせる。
【解決手段】自動変速(D)モードで手動変速パドルの操作がある時(S1)、Dモードから手動変速(DM)モードにする。S3〜S6で、アクセル開度APO>0のエンジンブレーキ非要求、且つ、コーナリング走行中でなく、且つ、スポーティ走行中でなく、パドルの再操作がないと判定する場合、つまり、DMモードからDモードへの復帰を許可する条件が整っていれば、S7〜S10において、S2でのD→DMモード切り替えからの車両走行距離L(S9で積算)がDモード自己復帰判定用設定距離Ls(S8で演算)に達したか否かを判定する(S10)。L≧LsになるときS11において、DMモードからDモードへの自動復帰を行わせる。
(もっと読む)
車両用駆動力制御装置
【課題】外乱に基づいて、車両に減速度を付与する制御を行なう車両用駆動力制御装置において、運転者のアクセルペダルの戻し操作に応じて、より確実に減速度を発生させることの可能な車両用駆動力制御装置を提供する。
【解決手段】外乱に基づいて、車両に減速度を付与する制御を行なう車両用駆動力制御装置であって、スロットル開度が全閉であるときに(S4−Y)アクセル開度が減少したとき(S6−Y)には、車両に減速度を付与する(S8)。前記外乱には、路面勾配、車両前方のコーナー、先行車両、コーナリング抵抗、車重、車両が走行する場所の標高、路面抵抗、車両のエンジン性能のばらつき、及び車両のトランスミッションのひきずりのばらつきの少なくともいずれか一つが含まれることを特徴としている。
(もっと読む)
車両の減速制御装置
【課題】カーブまでの距離が遠いのに、強い減速度で、カーブを走行する際の安全旋回速度まで車速を低下させるための減速制御が行われる。
【解決手段】車両前方に存在するカーブを走行する際の安全旋回速度、自車両の速度、および、自車位置から車両前方に存在するカーブまでの距離に基づいて、車両を減速させるための目標減速度を決定し、決定した目標減速度に基づいて、車両を減速させる車両の減速制御装置において、車両前方に存在するカーブまでの距離が所定距離より遠い場合には、目標減速度を制限する。
(もっと読む)
車両用駆動力制御装置
【課題】走行環境パラメータに基づいて、車両の変速機を変速制御する場合に、エンジン回転数が高いことによるドライバビリティの問題の抑制と、エンジンブレーキ力の確保の両立が実現されることが可能とする。
【解決手段】走行環境パラメータ(S1)に基づいて、車両の変速機を目標変速段及び目標変速比(S2、S7)のいずれか一方に変速制御する車両用駆動力制御装置であって、前記走行環境パラメータに対応する場所及び状況の少なくともいずれか一方から前記車両が脱出した後に前記車両のアクセルが継続して開いた状態とされるか否かを推定する推定手段(S5)と、前記推定手段により前記車両のアクセルが継続して開いた状態とされると推定された場合(S5−Y)には、前記車両のアクセルが継続して開いた状態とされると推定されない場合(S5−N)に比べて、前記目標変速段及び前記目標変速比のいずれかが高速段側に設定され易く制御される(S7)。
(もっと読む)
変速操作指示装置
【課題】ドライバの安全性を確保した上で燃費よく走行が可能な変速操作指示を出すことができる変速操作指示装置を提供する。
【解決手段】マイコン11は変速線に基づく最適ギヤ位置が実際の手動変速機のギヤ位置と異なっているときシフト表示器30による変速操作の指示を行わせる。マイコン11はカーナビゲーション装置41および交通情報検出装置42および横滑り防止装置43およびブレーキ制御装置44のうちのいずれかと連携して、燃費を優先した標準モードと、ドライバの安全確保を重視した安全志向モードのいずれかのモードを選択して、安全志向モードを選択した時には標準モードを選択した時に比べてシフト表示器30による変速操作の指示を遅延、または、シフト表示器30による変速操作の指示を禁止する。
(もっと読む)
変速操作指示装置
【課題】ドライバの志向に見合った変速操作指示を出すことができる変速操作指示装置を提供する。
【解決手段】マイコン10は、カーナビゲーション装置40による進行方向の渋滞までの距離から車両が渋滞に近づいたときにおいてアクセル開度が減少した時に車列の末尾に近づいたと推定して車両加速度が正になるまでシフト表示器30による高ギヤ段への変速操作の指示を制限する。
(もっと読む)
運転指向推定装置
【課題】車両の走行環境によって発生する運転者の意図と運転指向の推定値との乖離を改善することが可能な運転指向推定装置を提供する。
【解決手段】人工知能システムを用いて運転指向を推定する運転指向推定装置であって、前記人工知能システムで処理される運転者の操作量及び車両の状態量の少なくともいずれか一方のパラメータと、運転者の意思とが異なる予め設定された特定状況であるか否かを検出する手段と、前記特定状況である場合(S002−Y、S003−Y)に、前記パラメータを修正する手段(S004、S005)とを備えている。
(もっと読む)
車両の制御装置
【課題】走行ノイズが周囲に与える影響が大きいタイミングで走行ノイズを抑制する。
【解決手段】目標変速比を設定するステップ(S100)と、騒音レベルNを検知するとともに、騒音レベルNを表示するステップ(S102)と、現在時刻Tおよび現在位置Pを検知するステップ(S108)と、現在時刻Tが深夜帯に含まれ(S110にてYES)、現在位置Pが人口密集地であり(S112にてYES)、騒音レベルNが許容値より大きいと(S114にてYES)、走行ノイズが周囲に与える影響が大きいことを運転者に知らせる警報を発生するステップ(S116)と、アクセルペダルの操作反力を大きくするステップ(S122)と、目標変速比を小さくするように変更するステップ(S128)とを含むプログラムを実行する。
(もっと読む)
車両用駆動力制御装置
【課題】運転指向の推定結果に基づいて、急減速時制御のような運転者の車両の制動操作に基づいて減速度をアシストする減速度アシスト制御が許可される場合に、運転者の違和感を抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】運転者の車両の制動操作に基づいて減速度をアシストする減速度アシスト制御(S−8)を行なう車両用駆動力制御装置において、前記減速度アシスト制御の許否は、運転指向の推定結果に基づいて決定され(S−1)、運転者の車両の操作状態及び前記車両の走行環境の少なくともいずれか一方が、予め前記減速度アシスト制御が行なわれたときには運転者に違和感を与える可能性があるとして設定された設定状況に該当する場合(S−7−N)には、前記減速度アシスト制御は許可されない。前記設定状況とは、前記制動操作に対応する圧力が減少している状況である。
(もっと読む)
無段変速機の制御装置
【課題】運転者が手動で変速特性を設定する煩わしさを防止した上で、運転状態に応じてきめ細かに且つ主観を排除して客観的に変速特性を設定できる無段変速機の制御装置を提供する。
【解決手段】運転者の運転操作、車両の旋回状態、登坂路の勾配に応じて余裕代Kresを学習し、運転者のアクセル操作量及び車速から求めたエンジンの目標パワーを達成可能な等パワー曲線を特定し、等パワー曲線上において燃費重視の運転点と加速応答性重視の運転点との間で余裕代Kresに基づいて最適な目標運転点を決定し、決定した目標運転点に基づいて変速制御を実行する。
(もっと読む)
流体継手を備えた車両の車両重量検出装置
【課題】エンジン動力を車両の駆動輪に伝達する動力伝達装置に流体継手を配置した車両において、運動方程式を利用した演算手段により車両重量を精度よく検出する。
【解決手段】車両重量検出装置では、流体継手のポンプの回転数np及びタービンの回転数ntを検出し、その速度比eから流体継手のトルク特性を利用して伝達トルクTfを算出する。算出された伝達トルクを用いて車両の駆動力を求め、一方、車両の加速度、路面勾配等の車両に働く抗力に関連する因子を、車速センサなどの信号によって算出する。さらに、これらの算出された駆動力、加速度等に運動方程式を適用して車両重量を演算する。この車両重量検出装置では、流体継手の特性を用いて動力伝達系の駆動トルクを算出し駆動力を演算するため、演算結果の精度が向上し、また、演算による車両重量の検出であるため、車両重量を測定するセンサを設ける必要はない。
(もっと読む)
無段変速機の制御装置
【課題】ベルト滑りを生じさせずにプライマリプーリへの入力トルクを大きくする無段変速機を提供する。
【解決手段】プライマリプーリ2の可動円錐板2bのLow側への移動を規制するストッパー2dを備え、メカLow走行条件が成立すると、プライマリプーリ圧Ppriをドレーンして可動円錐板2bをストッパー2dによって固定し変速比を設定し、セカンダリプーリPsecを制御してプライマリプーリ2の推力を制御する。
(もっと読む)
車両走行路の湾曲傾向検出装置およびこれを用いた車両の動作応答制御装置
【課題】車両走行路の湾曲傾向(湾曲変化頻度)を、左右輪間で有効タイヤ半径が異なる場合においても、これによる影響を受けて誤検出することなく正確に検出する。
【解決手段】演算部21は、左右車輪速VL,VRと、左右輪間トレッドWの半値とから、横加速度Gy=(VR−VL)・(VR+VL)}・(1/2)Wを演算し、このGyをバタワースフィルタ22に通過させてノイズを除去する。演算部23は、横加速度Gyのフィルタ処理値からその時間変化割合である横加速度微分値|dGy|を求め、算出部24は、走行状態に応じて異なる有効周波数帯の横加速度微分値|dGy|を抽出して、その平均出力レベルから車両走行路の湾曲傾向βを求める。上記抽出すべき横加速度微分値|dGy|の有効周波数帯は車速VSPが高いほど高周波域になることから、湾曲傾向算出部24を成すローパスフィルタのフィルタ係数をフィルタ係数設定部25により高車速ほど高くする。
(もっと読む)
車両用駆動力制御装置
【課題】コーナーを走行する際に車両の減速制御を行う車両用駆動力制御装置であって、減速度の過不足を抑制可能な車両用駆動力制御装置を提供する。
【解決手段】車両の前方のコーナーを検出する手段(S30)と、前記コーナーの曲がり度合いに基づいて、第1の目標減速度を設定する第1目標減速度設定手段(S40)と、前記コーナーを前記車両が通過するために必要となる減速度を第2目標減速度として算出する第2目標減速度算出手段(S50)と、前記第1目標減速度及び前記第2目標減速度に基づいて、最終目標減速度を設定する最終目標減速度設定手段(S60)と、前記最終目標減速度に基づいて、前記車両の駆動力を制御する駆動力制御部(S70)とを備えている。前記最終目標減速度設定手段は、前記第1目標減速度及び前記第2目標減速度の中でより減速度が大きい方を最終目標減速度として選択することができる。
(もっと読む)
車両用駆動力制御装置
【課題】走行環境に基づいて運転者の減速意図に応答して減速制御を実施し、運転者の減速制御を拒否する操作に基づいて、上記減速制御が終了する車両用駆動力制御装置であって、運転者が違和感を感じることを抑制する。
【解決手段】車両の走行環境を走行するために適切な前記車両の減速度を求める手段(S302)と、運転者の減速意図が検出されたときに前記減速度に基づいて前記車両の駆動力を制御する手段(S304)と、前記運転者による前記車両の駆動力の制御を拒否する意図に対応する制御拒否操作を検出する手段(S305)とを備え、前記車両の駆動力の制御が開始された後に前記制御拒否操作が検出された後、前記走行環境の変化が予め設定された設定値よりも少ない場合(S307−N)には、前記運転者の減速意図が検出されたときに前記車両の駆動力の制御が行われ難くされている(S309)。
(もっと読む)
81 - 100 / 157
[ Back to top ]