
Fターム[3J552VE03]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 外部からの情報 (777) | 環境 (553) | 道路状態(降雨,渋滞,カーブ等含む) (499)
Fターム[3J552VE03]の下位に属するFターム
路面傾斜(登坂、降坂) (293)
すべり易さ(例;低μ路) (49)
Fターム[3J552VE03]に分類される特許
21 - 40 / 157
車両用駆動力制御装置
【課題】駆動要求操作に対する動力源の回転数変化を抑制することのできる車両用駆動力制御装置を提供すること。
【解決手段】動力源と動力伝達機構とを備え、駆動力を要求する駆動力要求操作の操作量が所定の変化幅の範囲内にある場合に、その操作量に対する動力源の回転数変化が抑制される車両用駆動力制御装置において、駆動力要求操作の操作量が増加から減少あるいは減少から増加に転じた時点の操作量を保持する操作量保持手段(ステップS10)と、一回前に保持された操作量を基準として駆動力要求操作の操作量に対する動力源の回転数変化を抑制する変化幅を算出する変化幅算出手段(ステップS5およびステップS6)とを備え、駆動力要求操作の操作量が変化幅の範囲内にある場合に、保持された操作量が動力源あるいは動力伝達機構に対して出力される(ステップS11)。
(もっと読む)
車両の変速制御装置

【課題】 ダウンシフト直前の車速にかかわらず適度な減速感を得ることができ、ドライバに与える違和感を軽減できる車両の変速制御装置を提供する。
【解決手段】 車両前方の減速対象を検出するナビゲーションシステム13と、エンジン1と左右前輪5a,5bとの間に介装したCVT2と、検出された減速対象に応じた目標減速度Gtを算出し、自車と減速対象との距離Lnが距離閾値Lt以下となったとき、目標減速度Gtに応じてCVT2の変速比をダウンシフト側へ変更するCVTコントローラ6と、を備え、CVTコントローラ6は、目標減速度がGt高いほど距離閾値Ltを増加させる。
(もっと読む)
車両の変速制御装置
【課題】 複数のコーナーが連続する複合コーナーにおいて、ドライバの意図しない減速度変化を抑制できる車両の変速制御装置を提供する。
【解決手段】 コントローラ5は、車両前方に連続する複数のコーナーが検出された場合、複数のコーナーのうち最も曲率半径の小さなコーナーを減速対象として選択し、当該コーナーの曲率半径に応じて自動変速機2の変速比をダウンシフト側へ変更する。
(もっと読む)
車両の変速比制御装置及び変速比制御方法
【課題】要求駆動力に対する加速レスポンスの悪化を抑制することが可能な、車両の変速比制御装置及び変速比制御方法を提供する。
【解決手段】消費エネルギー効率判定手段44が、車両の速度に対応する変速比領域を設定した通常変速マップに基づく変速比の変更条件で、走行パターン予測手段38が予測した走行パターンにより車両が走行した場合の、車両が消費する通常消費エネルギーよりも、通常変速マップよりも低速側の変速比領域を高速側へ拡大したローギア領域拡大変速マップに基づく変速比の変更条件で、走行パターン予測手段38が予測した走行パターンにより車両が走行した場合の、車両が消費するローギア消費エネルギーの効率が良いと判定すると、ローギア領域拡大変速マップに基づいて、駆動輪とモータとの間に介装した変速機の変速比を変更する。
(もっと読む)
車両制御装置、車両制御方法および車両制御プログラム
【課題】クラッチの解放による燃費向上が不十分となる場合があった。
【解決手段】交差点における通過禁止期間と通過許可期間とを示す交差点情報を取得し、前記自車両が前記交差点に進入するための道路上で停止したと判定された場合、前記自車両の停止位置と前記交差点との間に存在する他車両を示す情報を取得し、前記交差点情報に基づいて特定される前記通過禁止期間から前記通過許可期間への切替時刻と前記他車両を示す情報とに基づいて、前記自車両が所定期間内に移動するか否かを推定し、前記自車両が前記所定期間内に移動しないと推定された場合、トルクコンバータから変速機に伝達されるトルクを調整するクラッチを解放状態とする。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、電動機の出力軸の接続状態を適切に選択して車両旋回中におけるドライバビリティを向上すること。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」、いずれの間にも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構を備える。この装置は、直進中か旋回中か、並びに、通常状態か連続旋回状態かの判定を行う。「連続旋回状態の直進中」では「通常状態の直進中」に比して、駆動輪に伝達される電動機トルクの最大値がより大きい接続状態がより選択され易くされる。旋回中では、接続状態の切り替えがなされない。
(もっと読む)
無段変速機の変速制御装置
【課題】実アクセル開度と変速制御用アクセル開度との間のヒステリシスが、運転者の意図や車両の負荷状況等の運転状態に応じた最適な値となる無段変速機の変速制御装置を提供する。
【解決手段】本発明は、実アクセル開度APO(a)に応じて変速制御用アクセル開度APO(c)を設定し、当該アクセル開度APO(c)に基づいた変速制御を行う無段変速機の変速制御装置において、実開度APO(a)と制御用開度APO(c)との間のヒステリシスhを、車速VSP、燃費性能及び動力性能の運転状態に応じて変更する。
(もっと読む)
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
車両の動力伝達機構をコントロールするための方法およびシステム
車両のための動力伝達機構をコントロールするための方法およびシステムであって、道路状態を記録するステップ、前記記録された道路状態が標準道路状態に対応する場合には、通常の道路における状態に対応する標準モードで前記車両を運転するために意図された第1のギア選択コントロール・アルゴリズムを使用するステップ、および前記記録された道路状態が軟弱地表面道路状態に対応する場合には、軟弱地表面道路における状態に対応する軟弱地表面モードで前記車両を運転するために意図された第2のギア選択コントロール・アルゴリズムが使用されるステップ、を有する。本発明は、AMTが備えられた車両を増大する条件の多様性の下に満足のゆく形で動作すべく適合させることを目的とする。 (もっと読む)
省燃費運転システム及びその制御方法
【課題】上り坂を走行中に上り坂に関する道路勾配情報データベースを構築することが出来て、上り坂を走行する際に省燃費走行を行なう様なアドバイスや車両制御を行なうことが出来る省燃費運転システム及びその制御方法の提供。
【解決手段】車速を計測する装置(3)と、車両の加速度を計測する装置(4)と、燃料流量を計測する装置(5)と、エンジン負荷を計測する装置(6)と、エンジン回転数を計測する装置(7)と、シフト位置を検出する装置(9)と、上述した各装置からの信号を受信して演算と解析を行なう制御装置(10)とを備え、該制御装置(10)はエンジン出力を演算し、演算されたエンジン出力がエンジン出力規定値(Pa)以上であるが、車両加速度が車両加速度規定値(αa)以下であれば上り坂を走行していると判断する機能を有している。
(もっと読む)
車両用制御装置
【課題】この発明は、エンジンの自動的な停止/再始動について運転者の操作負担を軽減し、エンジンの再始動後に車両が自動的に発進されることがない車両用制御装置を実現することを目的とする。
【解決手段】この発明は、車両用制御装置において、エンジン制御手段は、エンジンを自動的に停止させる場合に、シフトバイワイヤ式変速制御手段に変速機を駐車レンジに変更するように要求し、また、エンジンを再始動した後、シフトバイワイヤ式変速制御手段に変速機のシフトレンジを走行レンジに変更するように要求し、シフトバイワイヤ式変速制御手段は、走行レンジヘの変更要求がある時で、かつ車両のブレーキ装置が作動状態ではない時には、車両状態判定手段により車両が前方に移動可能であると判定された場合にのみ、変速機を走行レンジに変更するように制御することを特徴とする。
(もっと読む)
動力伝達部の制御装置
【課題】押付力により動力伝達を行う動力伝達部において、不要な押付力の発生による大きな作用圧供給を生じさせず、燃費の悪化をもたらすことがない動力伝達部の制御装置を提供する。
【解決手段】押付力により動力伝達を行う動力伝達部の制御装置において、運転状態の変化に際し、押付力に、無段変速機13に入力する入力トルクの増大量を用いて演算する補正量を加算することにより、無段変速機13の滑りを防止する。補正量は、無段変速機13に入力する入力トルクを微分処理した値に基づき演算する。無段変速機13に入力する入力トルクは、微分処理する前にフィルタ処理をする。
(もっと読む)
自動変速機制御装置
【課題】簡易MモードからDモードに戻る際の変速速度を一定に設定すると、車両の様々な走行状態に対応することができず、運転者に違和感を与えることが避けられなかった。
【解決手段】セレクトレバーのDレンジ選択による自動変速モードと、セレクトレバーの手動操作による手動変速モードと、セレクトレバーのDレンジ保持中に、セレクトレバー以外からのシフト信号を受けて変速段を一時的にシフトさせる簡易手動変速モードとを備えた自動変速機制御装置において、簡易手動変速モードから自動変速モードに移行する際の自動戻り変速速度を、車両の走行状態に応じて変更する変速速度調整部16を有する。
(もっと読む)
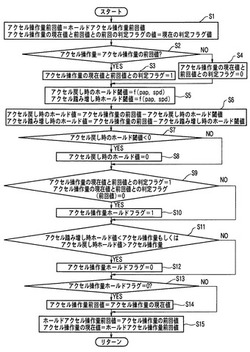
車両走行制御方法
【課題】
車両減速時における車両運動エネルギーの効果的・効率的活用。
【解決手段】
車両現在位置から車両停止地点等の目標地点までの走行距離、現時点の車両走行速度、車両の惰性走行時の減速度、あるいは目標地点到達時刻、をあらかじめ知って、現在地点から惰性走行を開始した場合の停止地点への到達可否の判定を行い、到達可であればその地点からの惰性走行を開始する。到達否であれば、車両現在地点から一定距離走行毎に前記操作を繰り返し、到達可となった時点で惰性走行を開始する。
また前方走行車両への追従走行に際し、前方走行車との車間距離、相対速度、安全車間距離を知って、安全車間距離を満足する同一特定車間距離での加速走行開始、惰性走行開始を交互に繰り返し行うことによって、あるいは相対速度があらかじめ定められている前方走行車との相対速度範囲上下限値+Vr1 および−Vr1到達時において各々惰性走行開始および加速走行開始を行うことによって、ブレーキ操作を介さない安全で効率的な追従走行を可能にする。
【選択図】 図6 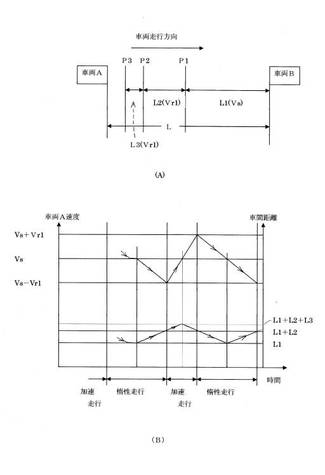 (もっと読む)
(もっと読む)
走行アドバイス装置
【課題】 本発明は、車両の運転者に車両操作をアドバイスする走行アドバイス装置に関し、GPS装置等からの標高情報により路面の傾斜状態を容易,確実に求め適切なアドバイスをすることを目的とする。
【解決手段】 車両が現在位置する標高を検出する標高検出手段と、前記標高を時刻とともに記憶する記憶手段と、現在の標高と予め定められた所定時間前の標高の差から路面の傾斜状態を判断する判断手段と、前記傾斜状態に基づいて車両操作をアドバイスする制御手段とを有することを特徴とする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】所定区間において自車両を目標車速で定速走行させるための変速比に設定することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間において前記自車両を前記目標車速で定速走行させるために前記所定区間において維持すべき変速比である目標変速比を取得し、前記所定区間を前記目標車速で定速走行させるために前記自車両を前記目標車速とすべき目標地点に到達する前に前記自車両の変速比を前記目標変速比に設定させ、前記目標地点において前記自車両の車速が前記目標車速となるように前記自車両の車速を変化させる。
(もっと読む)
移動農作業機の変速操作装置
【課題】 農作業走行の土壌条件によって、車体の沈下が著しい場合があり、作業はもとより走行不能状態に至ることがある。又、逆に車体の沈下が少ない土壌面での走行では、走行負荷が小さく加速し易いため、この車速の加速は制限されるのが望ましい。
【解決手段】 走行しながら対地作業する移動農作業機において、車体の沈下量の検出に基づいて、この沈下量が大きいときは、変速スイッチ2の操作による変速アクチュエータ3の変速操作の速さを速くし、又、沈下量が小さいときは、この変速操作の速さを緩くする構成とする。
(もっと読む)
省燃費運転診断装置、省燃費運転診断システム及び省燃費運転診断方法
【課題】運転者のシフトモード状態選択操作の改善意欲や省燃費運転の知識と意識を向上させる。
【解決手段】シフトモード状態判定部11b1は、車両1aのシフトモード状態が所定条件を充足しているか否かを判定する。走行距離積算部11cは、シフトモード状態が所定条件を充足していると判定された場合、最適シフトモード状態選択走行距離を積算する。走行距離積算部11cは、シフトモード状態が所定条件を充足していると判定されなかった場合、不適シフトモード状態選択走行距離を積算する。省燃費運転採点部12は、走行距離積算部11cによって積算された各積算値に基づいて運転者の運転を採点する。省燃費運転アドバイス生成部13は、採点結果に応じて、採点結果とともに省燃費運転アドバイスを運転者へ通知する。よって、運転者に燃費のよい最適シフトモード状態選択を奨励し、運転者の省燃費運転の知識と意識の向上を図ることができる。
(もっと読む)
車両の誤発進防止装置
【課題】車両の発進時および車両の発進直後の少なく一方において、運転者が車両を動かそうとする意志の方向と異なる方向に車両が動こうとしたときに、車両の動きを抑制する。
【解決手段】制御部2は、レンジ検出部3からの運転者が選択した選択レンジの検出信号および運転者状態検出部5からの運転者状態検出信号に基づいて、運転者の選択したレンジの車両の移動方向が運転者の車両を移動させようとする意志の方向と異なると判断したときは、車両抑制手段11を作動させて車両の動きを抑制する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自動で減速を行うための制御を実施している過程にて当該自動制御を中止した場合であっても安定した走行を行わせること。
【解決手段】自車両の制御状態が自動制御に設定されている場合に、前記自車両の減速量を制御して前記自車両の車速を所定の目標車速まで減速させ、前記減速量を所定の基準に対応した変化量で変化させて前記自動制御から前記手動制御へ移行させる。
(もっと読む)
21 - 40 / 157
[ Back to top ]