
Fターム[3J552VE03]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 外部からの情報 (777) | 環境 (553) | 道路状態(降雨,渋滞,カーブ等含む) (499)
Fターム[3J552VE03]の下位に属するFターム
路面傾斜(登坂、降坂) (293)
すべり易さ(例;低μ路) (49)
Fターム[3J552VE03]に分類される特許
61 - 80 / 157
車両制御装置、車両制御方法及びプログラム

【課題】駐車中の自車両に他車両が衝突した際に、車体への損傷を軽減することが可能となる車両制御装置を提供する。
【解決手段】駐車中の自車両2に、前後方向から他車両が所定距離以内(例えば、約50cm以内である。)に接近した場合には、CPU41は、駐車している路面の勾配に基づいて、AT72を「パーキングレンジ(P)」から移動可能な「ニュートラルレンジ(N)」、「ドライブレンジ(D)」又は「リバースレンジ(R)」に切り替える。また、同時に、CPU41は、駐車している路面の勾配に基づいて、パーキングブレーキ73の制動力を解除状態(OFF状態)又は自車両2が停止状態を維持できる程度の制動力まで緩めた状態に設定する(S111〜S116)。
(もっと読む)
走行支援装置、走行支援方法及び走行支援プログラム

【課題】カーブ走行時にシフト制御を行うとともに、変速ショックを緩和することができる走行支援装置、走行支援方法及び走行支援プログラムを提供する。
【解決手段】車両Cの自動変速装置と制動装置とを制御して、車両前方のカーブに対して支援を行うナビゲーションユニット20において、メインCPUは、車両の進行方向前方の道路に関する道路情報を取得して、前記道路情報に基づき支援対象となるカーブがあるか否かを判断し、車両の進行方向前方に支援対象のカーブが検出された際に、該カーブの走行に適した推奨変速段を算出し、車両情報に基づき、その時点の変速段から前記推奨変速段に変更した際に生じるトルク変化量を推定し、該トルク変化量に基づいて、ブレーキECU12を制御して制動力を付加するとともに、自動変速装置を制御して前記推奨変速段に変更する。
(もっと読む)
作業車両の走行変速装置
【課題】本発明は、単なる路上走行の際には、走行開始の変速段を最低速以外の適宜変速段に設定して発進するようにして、発進から所望走行速度に達するまでの時間を短縮できるようにすること課題とする。
【解決手段】走行速度を少なくとも路上走行速度に設定する走行種別設定手段18と変速段設定手段33,34を設け、走行種別判定手段18の走行種別を路上走行にした場合には、前記変速段設定手段33,34で発進時の走行開始変速段を変更可能に構成したことを特徴とする作業車両の走行変速装置の構成とする。
(もっと読む)
車両用駆動力制御装置
【課題】コーナーを走行する際にコーナーの情報に基づいて変速比を制御する車両用駆動力制御装置において、運転者の感覚に合うタイミングでコーナーの情報に基づく変速比の制御から復帰することが可能な車両用駆動力制御装置を提供する。
【解決手段】コーナーを走行する際に前記コーナーの情報に基づいて変速比を制御する車両用駆動力制御装置であって、前記車両に働く横加速度を検出する手段(S002)と、アクセル開度を検出する手段(S002)とを備え、前記横加速度の変化量と前記アクセル開度の変化量とに基づいて前記変速比の制御から復帰するタイミングが変更される(S004)。
(もっと読む)
旋回支援装置、旋回支援方法及び旋回支援プログラム
【課題】車両の回頭性を向上することができる旋回支援装置、旋回支援方法及び旋回支援プログラムを提供する。
【解決手段】道路の通行方向を含む経路データ18を記憶した地理情報記憶部17を用いて、自車両の旋回を支援するナビゲーションユニット2において、メインCPU20は、自車位置を演算し、経路データ18に基づき、自車位置の進行方向前方に、支援対象となる転回地点を検出し、自車両の転回地点での転回方向を検出し、転回地点の自車両の転回方向に基づき、自車両内輪に制動力を付加する。
(もっと読む)
自動変速機の制御装置および制御方法
【課題】運転者の操作および車両が走行する環境の両方の相互作用を考慮したギヤ段を設定することにより、オートマチックトランスミッションのギヤ段をきめ細かく制御する。
【解決手段】アクセル開度およびブレーキペダルのストローク量などの運転者の操作を示す情報に応じて、アクセル開度および駆動力を成分として有するパラメータが設定される。運転者の操作を示す情報と同様に、路面の勾配、路面の曲率、路面の摩擦係数μ、道路の種類、渋滞の距離などの、車両が走行する環境を示す情報に応じて、アクセル開度および駆動力を成分として有するパラメータが設定される。運転者の操作を示す情報から得られたパラメータα(1)および車両が走行する環境を示す情報から得られたパラメータα(2)を調停することにより、1つのパラメータα(OUT)が設定される。パラメータα(OUT)に応じたギヤ段が設定される。
(もっと読む)
自動変速機の制御装置および制御方法
【課題】より適切なギヤ比を設定する。
【解決手段】運転者の操作を示す情報および車両が走行する環境を示す情報に応じて、アクセル開度、車速および駆動力を成分として有するパラメータα(OUT)が設定される。アクセル開度、車速および駆動力に応じてギヤ段を定めた変速マップおよびパラメータα(OUT)に従ってギヤ段が設定される。変速マップにおいて、変速線は、車速に対する駆動力の増加率が零以上になるように規定される。ダウンシフト線は、アクセル開度が大きいほど駆動力が小さくなるようにダウンシフト線が規定される。前回ギヤ段を変更してからのアクセル開度の変化量がしきい値より大きいという条件および前回ギヤ段を変更してからの駆動力の変化量がしきい値より大きいという条件の両方が満たされない場合、アップシフト後のダウンシフトおよびダウンシフト後のアップシフトが禁止される。
(もっと読む)
車両用駆動力制御装置
【課題】料金所に近づく車両の駆動力を制御するに際し、より運転者に違和感のない駆動力制御が行われることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の前方の料金所を検出する料金所検出手段(S1)と、前記料金所が設けられた道路の種類を検出する道路種類検出手段(S2)と、前記車両の運転者の減速意図(S5)と、前記料金所検出手段による検出結果に基づいて、前記車両の減速度を増加させるように前記車両の駆動力を制御する駆動力制御を行う制御手段(S6)とを備え、前記駆動力制御における前記減速度の増加分は、前記道路種類検出手段による検出結果に基づいて設定される(S3、S4)。
(もっと読む)
車両用駆動力制御装置
【課題】運転者の減速意図に基づいて減速制御を行い、運転者の加速意図に基づいて減速制御から復帰する車両用駆動力制御装置において、運転者の感覚に合ったタイミングで走行環境パラメータに基づく減速制御から復帰する。
【解決手段】車両の走行環境(S1)及び運転者の減速意図(S2)に基づいて減速制御(S3)を行うとともに、運転者の加速意図(S4)に基づいて予め設定された復帰時間の経過後(S8、S9)に前記減速制御から復帰(S10)する車両用駆動力制御装置であって、前記運転者の加速意図が検出された際の車両の走行環境(S5、S6)に基づいて、前記復帰時間が可変に設定される(S7)。前記運転者の加速意図が検出された際の車両の走行環境に基づいて、前記運転者の加速意図が検出された後に運転者の減速意図が検出される可能性が高いと判定された場合(S5−Y、S6−Y)には、前記復帰時間が大きな値に設定される(S7)。
(もっと読む)
自動車の運転者によるエコ運転の採用を支援する対話式方法及びこの方法を用いる車両
本発明は対話式の運転支援方法に関する。この方法においては、所望の運転スタイルを選択し、検出された運転状況の間、運転者の挙動を解析する(F1)。次に、所望の運転スタイルに応じて現在の運転状況に推奨される運転者の挙動をメモリ(5)から選択する。次に、運転者の挙動と推奨される挙動とを比較し(F1、16)、改善の余地があるとみなされた挙動のポイントを識別する。最後に、運転者に対し、少なくとも最も重大なポイントについて、運転者の挙動を修正するよう促す音声及び/又は映像メッセージ(7)を発信する(F4、F5、27)。 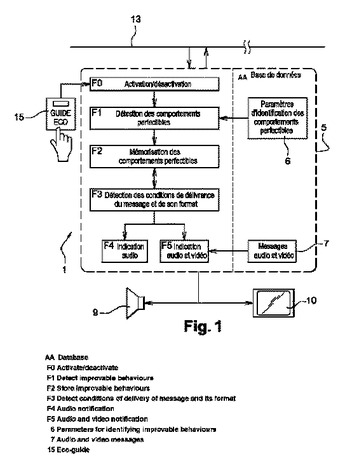 (もっと読む)
(もっと読む)
シフトバイワイヤシステム
【課題】安全性を高めるシフトバイワイヤシステムを提供すること。
【解決手段】シフトバイワイヤシステムにおいて、自動変速機のレンジ切替のためのシフトアクチュエータの出力をシフト指令に従って電気的に制御するシフト制御装置は、走行レンジを切替先とするシフト指令が入力された場合(S101,S103,S111)に、当該走行レンジにおいて車両の走行障害となる障害物を検出する(S104,S112)ことにより、入力されたシフト指令を拒絶する(S106,S114)ことを特徴としている。
(もっと読む)
駆動力制御装置
【課題】道路状況又は車両走行状況に応じて出力トルクを変更する制御から復帰するときに、ショックを低減させることが可能な駆動力制御装置を提供する。
【解決手段】道路状況又は車両走行状況に応じて出力トルクを変更する変速点制御を行う駆動力制御装置であって、前記変速点制御の予め設定された特定復帰条件(XCONST)を満たして前記変速点制御から復帰するとき(Ty)には、前記特定復帰条件を満たすことなく前記変速点制御から復帰するときに比べて、前記出力トルクの変化率を小さく設定する。
(もっと読む)
車両用駆動力制御装置
【課題】車両の駆動力を制御する車両用駆動力制御装置において、車両の駆動力を制御した後の車両が安定的な状態となるように制御することが可能な車両用駆動力制御装置を提供する。
【解決手段】タイヤのグリップ限界に基づいて前記タイヤにかかる出力トルクを制御する車両用駆動力制御装置であって、各輪の前記タイヤの駆動力の変化量と横力の合成力(FLn)と各輪の前記タイヤのグリップ限界(FTn)の比較結果に基づいて、前記タイヤにかかる出力トルクを制御する。前記各輪のタイヤのグリップ限界は、路面摩擦係数、前記各輪にかかる重量、及び重力加速度に基づいて設定される。
(もっと読む)
車両用制御装置
【課題】前方の車両に接近した場合であっても違和感のない走行をおこなうことができる制御装置を提供することを目的とする。
【解決手段】走行中の自車両と前方の車両との車間距離に基づいて自車両のいずれかの動作機構を制御する車両用制御装置において、自車両の前方の車両に対する接近状態を検出する接近状態検出手段(ステップ11)と、交通渋滞の発生状態を検出する渋滞検出手段(ステップ12)と、自車両が前方の車両に接近していることを前記接近状態検出手段が検出し、かつ自車両が交通渋滞区間の中にあることもしくは自車両が交通渋滞区間に入ることを前記渋滞検出手段が検出したことに基づいて前記動作機構の制御内容を変更する渋滞制御実行手段(ステップ14)とを備えている。
(もっと読む)
走行制御装置及び走行制御方法
【課題】コーナーが連続する場合でも車両の円滑な走行制御を行うことができる走行制御装置及び走行制御方法を提供する。
【解決手段】車両に搭載された変速ECU及びブレーキ制御装置と協働して、コーナーでの走行制御を行うナビユニット2において、進行方向前方に、複合コーナーがあるか否かを判断する経路状況判断部20と、地図描画データ16を記憶した地理データ記憶部14と、複合コーナーが検出された際に、地図描画データ16に基づき複合コーナーの出口に最も近いコーナー部を通過する際の変速段を選択し、該変速段を複合コーナー全体に対する推奨変速段とし、変速ECUを制御する推奨変速段判定部22と、複合コーナーの入口に最も近いコーナー部に進入する際の必要減速度と推奨変速段とに基づき該コーナー部に進入する際の制動力の補助量を算出し、ブレーキ制御装置を制御する制動補助量演算部23とを備えた。
(もっと読む)
変速制御装置
【課題】コーナーを走行するに際してよりドライバビリティを向上させることの可能な変速制御装置を提供する。
【解決手段】コーナーの情報に基づいて変速比を変更する変速制御装置であって、前記コーナーを通過する際の必要減速度に基づき設定した第1目標変速比(S4)と、前記コーナーの立上り後の道路の情報から求めた必要駆動力に基づき設定した第2目標変速比(S5)との最大値を目標変速比(S6)として、前記変速比の変更を行う(S8)。
(もっと読む)
車両運転補助方法及び装置
本発明は、計算機を備えた制御システムを用いて、変速機ギア比を手動制御する車両の推進装置の駆動を補助するための方法と装置に関する。この計算機は、運転者の要求情報(2)に基づいて且つ各瞬間の車両の走行状態と変速法則のマッピング(7)に応じて、推奨ギア比を運転者に示すことを制御し、このマッピングに基づき、各瞬間の車速に応じて、最適な燃料消費及び最少の汚染物質放出のための推奨ギア比が決定される。本発明により、最適な消費のための推奨ギア比が、走行安全性と快適性に関する一組の制約を連続して考慮する連続ステップにおいて補正され、各ステップが先行するステップに優先することによって、最終的に推奨されるギア比が上記の様々な制約間を最適にバランスし、走行安全性を重視する。  (もっと読む)
(もっと読む)
無段変速機
本発明は無段変速機の制御構成に関する。この変速機は変動器駆動比に対応する位置を備える可動トルク伝達部分(ローラ18)を有する変動器(10)を含む。液圧アクチュエータ(28)はトルク伝達部分上に調整可能な力を与えるように配列される。この変速機は更に(a)トルク伝達部分の現在の位置及び(b)トルク伝達部分のための要求される位置を受け取るように配列された流れ制御構成を有する。要求される位置はたとえば運転手入力により決定することができる。流れ制御構成は、液圧アクチュエータに連通する供給出口を通して、2つの制御入力間の誤差に従って変調された流体の流れを供給するようにされる。流体の流れは誤差の増大と共に増大する。逃し通路(110)は出口から圧力貯めへ通じ、そこを通る流体流れが逃し通路を通る流量に対応する量だけ圧力貯めの圧力よりも大きな圧力を生じさせるように、絞られる。その結果は、トルク及び比制御の双方の利点のいくつかを所有する変速機の制御モードとなる。  (もっと読む)
(もっと読む)
車両用駆動力制御装置
【課題】車両の位置ないしは車両と自動車専用道路の本線に対して接続される接続道路との位置関係を正確に判定して車両の駆動力を制御する。
【解決手段】自動車専用道路の本線から分岐して接続される接続道路と車両との位置関係に基づいて、前記車両の駆動力を制御する車両用駆動力制御装置であって、運転者による前記自動車専用道路の本線と前記接続道路との間の走行路の変更意図を検出又は推定する手段(S3)と、前記車両が前記自動車専用道路の本線と前記接続道路との間で走行路を変更したことを検出する手段(S4)とを備え、前記走行路の変更意図が検出又は推定されている間、又は前記走行路の変更意図が検出又は推定されている状態から予め設定された時間内に、前記車両が前記走行路を変更したことが検出されたときに、前記車両の駆動力の制御を許可する(S5)。
(もっと読む)
ハイブリッド車両
【課題】ハイブリッド車両において、運転者による操作と車両の走行環境に基づいて運転モードの切り替えを行うことで運転者の加速意図に応じた加速性能を実現する。
【解決手段】運転者による運転操作と走行路の走行環境に基づいて、車両の走行状態を判断し、スポーツ走行状態である場合にはエンジン始動線を通常走行状態に係る原位置からEV走行モード領域側に変更してHEV走行モード領域を拡大する。
(もっと読む)
61 - 80 / 157
[ Back to top ]