
Fターム[4C601GA20]の内容
Fターム[4C601GA20]に分類される特許
1 - 20 / 112
超音波内視鏡システム
【課題】フレームレートを低下させることなく穿刺針の視認性を向上することができる超音波内視鏡システムを提供する。
【解決手段】超音波セル50cから送信される穿刺針検出用の超音波の中心周波数Frを、当該穿刺針検出用超音波のエコー波が超音波セル50a,50bから送信される生態観察用の超音波のエコー波との干渉を回避可能な十分に低い値に設定する。その上で、穿刺針39上に螺旋状の凹溝39を設け、この凹溝39間のエッジ間の距離aの最適化によって、穿刺針38の固有振動数と穿刺針検出用超音波の中心周波数とを合致させる。
(もっと読む)
超音波診断装置

【課題】穿刺針が明瞭に描出された超音波画像を生成することができる超音波診断装置を提供することである。
【解決手段】実施形態の超音波診断装置は、画像生成部と、検出部と、画像生成制御部とを有する。画像生成部は、超音波プローブから3次元領域に対して送信した超音波の反射波信号から生成されたボリュームデータに基づいて、超音波画像を生成する。検出部は、前記画像生成部によって生成された超音波画像のうち、前記3次元領域内にある穿刺針が描出された穿刺針画像を検出するか、又は、前記画像生成部によって超音波画像が生成される際に用いられたボリュームデータに基づいて前記3次元領域内にある前記穿刺針を検出して穿刺針データとして出力する。画像生成制御部は、前記穿刺針画像又は前記穿刺針データを用いて、前記穿刺針が描出された表示用画像を生成するように前記画像生成部を制御する。
(もっと読む)
複数の追跡方法を用いたプローブ追跡
【課題】被験者の体の内部でプローブの全長に沿って設けられた複数の点の、それぞれの見かけ位置を示す入力を受け取ることと、体内のプローブによって想定され得る形状に関する第1の費用関数を最小化するために、プローブの既知の機械的性質のモデルを、それぞれの見かけ位置に適用することとを含む方法を開示する。
【解決手段】この方法は、最小化された第1の費用関数に応答して、ある形状を選択し、その形状に応答して、見かけ位置の初期座標を決定することと、見かけ位置と初期座標との差に関する第2の費用関数を最小化することと、最小化された第2の費用関数に基づいて、プローブの全長に沿った点の修正座標を生成することとを更に含む。
(もっと読む)
超音波撮像のための方法およびシステム
【課題】針ガイドなどの機器を誘導する改良された超音波撮像システムおよび方法を提供する。
【解決手段】超音波撮像システム100は、超音波プローブ106と、超音波プローブ106に取り付けられている第1のセンサ122と、機器に取り付けられている第2のセンサ124と、表示デバイス118と、プロセッサ116とを含む。プロセッサ116は、超音波プローブ106を制御し、超音波データを取得するように構成されており、超音波データは、機器の長手方向軸に沿って画定された平面のデータを含む。プロセッサ116は、超音波データに基づいて平面の画像を生成し、表示デバイス118上にその平面の画像を表示するように構成されている。
(もっと読む)
超音波内視鏡用穿刺針装置
【課題】超音波内視鏡の先端近傍部が屈曲している内部管路に外周面に微小凹凸を有する穿刺針とシースを一緒に挿通したときに、穿刺針とシースの間に大きな摩擦抵抗を発生させることなく、穿刺針を超音波を利用して正確に認識できる超音波内視鏡用穿刺針装置を提供する。
【解決手段】穿刺針51の外周面の超音波プローブ12と反対側の領域の少なくとも一部に形成した、微小凹凸を具備する凹凸形成領域53と、該外周面の超音波プローブと対向する領域の少なくとも一部に形成した、該微小凹凸を具備しない凹凸非形成領域54と、を設けた。
(もっと読む)
超音波探触子及びそれを用いた超音波診断装置
【課題】超音波探触子の3次元位置検出手段を着脱自在に超音波探触子に装着可能にすると共に、超音波探触子に位置検出手段を収容しても超音波探触子の操作性が低下することのない超音波探触子及びそのような超音波探触子を用いた超音波診断装置を提供する。
【解決手段】超音波探触子は、被検体に超音波を送受波する振動子部と、振動子部を固定する探触子ヘッド部と、探触子ヘッド部に連結するグリップ部と、を備え、グリップ部は、超音波探触子の3次元位置情報を検出するための位置検出手段を取り外し可能に収容するための溝を有して成る。
(もっと読む)
超音波診断装置、超音波画像処理方法及び超音波画像処理プログラム
【課題】3次元画像と立体画像とを同時に表示することが可能な超音波診断装置を提供する。
【解決手段】実施形態に記載の超音波診断装置は、被検体に対して超音波を送受信する超音波振動子を有する超音波プローブを有する。また、画像処理部は、超音波振動子によって受信された信号に基づいて被検体のボリュームデータを形成するボリュームデータ形成部と、ボリュームデータに対して所定の処理を行い、第1の画像データを作成する第1画像データ作成部と、ボリュームデータに対して所定の処理を行い、第1の画像データとは異なる第2の画像データと、第1の画像データ及び第2の画像データとは異なる第3の画像データとを作成する第2画像データ作成部と、第2の画像データと第3の画像データとを合成して立体画像データを作成する立体画像データ作成部とを有する。また超音波診断装置は、第1の画像データに基づく3次元画像及び立体画像データに基づく立体画像を表示する表示部を有する。
(もっと読む)
画像処理装置及び方法
【課題】観察者が、不安定プラークの検出を容易に行えるように超音波画像を加工する画像処理装置及び方法を提供する。
【解決手段】画像処理装置は、被検者の拍動を検出し、画像フレーム群の拍動による影響がない期間とその周期を推定し、推定された期間のうちの一つの期間における画像に基づいて高周波成分が除去された参照高周波成分除去画像を生成する。また、推定された期間のうちの上記一つの期間とは異なる他の期間における画像に基づいて高周波成分が除去された比較高周波成分除去画像を生成する。そして、参照高周波成分除去画像と比較高周波成分除去画像との差分を算出して差分画像を生成し、差分画像の差分値を識別可能に、前記差分画像を表示する。
(もっと読む)
画像内の物体の向上された撮像のためのシステムおよび方法
超音波撮像における撮像平面の自動配置
光位置検知を使用した撮像及び治療のための装置、システム並びに方法
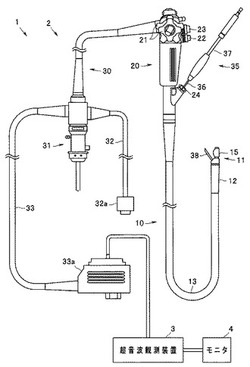
位置を決定するための装置、システム及び方法は、コンソール104から信号を受信し、反射波に基づいて画像を生成するためのトランスデューサ装置102を含む。可撓性のケーブル108は、コンソールからトランスデューサ装置へ励起エネルギーを供給するために、トランスデューサ装置に結合される。光ファイバ110は、オペレーションの間、ケーブルの形状及び位置に対応する形状及び位置を持つ。複数のセンサ122は、光ファイバと光通信する。光ファイバの偏向及び曲りがトランスデューサ装置についての位置情報を決定するために使用されるように、センサは、光ファイバの偏向及び曲りを測定する。 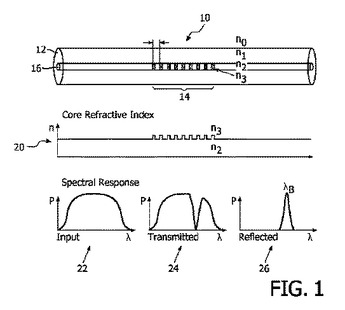 (もっと読む)
(もっと読む)
撮像装置
本発明は、対象物2の内部を撮像するための撮像装置1に関する。当該撮像装置1は、種々異なる周波数にて対象物の内部を検知するための第1の超音波センサ及び第2の超音波センサを有し、第1の超音波センサからの超音波検知信号が第1の超音波画像を生成するために使用され、第2の超音波センサからの超音波検知信号が第2の超音波画像を生成するために使用される。より低い周波数と比較すると、より高い周波数は概して対象物の内部へと浸透する深さがより浅く、より高い空間分解能を提供する。これ故、撮像装置1は異なる空間分解能及び異なる浸透深さにて対象物の内部を同時に撮像する能力を提供できる。これによって、撮像装置が対象物の内部を撮像するクオリティを改善できる。 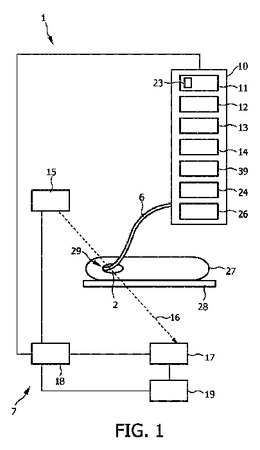 (もっと読む)
(もっと読む)
超音波カテーテル
【課題】 超音波カテーテルにおいて、超音波カテーテルとしての性能を損なわずに、X線透視下における超音波振動子の位置の把握を可能とする。
【解決手段】 体腔或いは管腔内に挿入して用いられる長尺なカテーテルシース2と、該カテーテルシース2内に内蔵され該カテーテルシース2の手元側から先端側まで機械的駆動力を伝達し、先端端部が段付き加工を施された段付き加工部を備えた駆動シャフト10と、該駆動シャフト10の先端側に接続された超音波振動子及び/または超音波反射板を備えたハウジング11と、を備え、駆動シャフトを外部駆動源により回転させる超音波カテーテル1において、前記駆動シャフト10の先端側端部にX線造影性投与手段12が設置され、前記駆動シャフト10の前期段付き加工部が前記ハウジング11の内側に一部重なり合って接続され、X線造影性投与手段12がこの重なりの間に設置されていることを特徴とする超音波カテーテル1。
(もっと読む)
超音波画像を使用した高速解剖学的マッピング
【課題】生きている被験者の身体内の腔の複数の二次元(2D)超音波画像を獲得することを含み、2D画像は3D基準座標系内で異なるそれぞれの位置を有する、三次元(3D)マッピングのための方法を提供する。
【解決手段】それぞれの2D超音波画像内で、腔の内部内の位置に対応するピクセルが識別される。複数の2D画像からの識別ピクセルを3D基準座標系内に登録して、腔の内部に対応する容積を規定する。腔の内面を表す、容積の外側表面を再構築する。
(もっと読む)
医療画像処理システム
【課題】従来の内視画像の視野範囲は狭く、周辺組織を見たいとの要望があった。内視画像と超音波画像とを合成して合成画像を生成する場合に簡易な構成で両者の位置決めを行うことが望まれていた。
【解決手段】医療画像処理システムは超音波診断装置10と内視装置12とで構成される。内視装置12により従来同様に内視画像が形成される。超音波診断装置10においては、ボリュームデータが取得され、その中に含まれる複数の高輝度点が特定される。それらは内視鏡42の先端部に設けられた複数の反射球を表すものである。複数の高輝度点から先端部の三次元位置を特定できるので、その三次元位置に基づいてボリュームデータから投影画像としての超音波画像が形成される。広い領域にわたる超音波画像上に局所領域を表現した内視画像が重合され、そのような合成画像が表示される。
(もっと読む)
超音波画像を三次元座標システムに登録するシステム
【課題】内部解剖学的構造を画像化するシステムを提供すること。
【解決手段】解剖学的構造の超音波画像データを第1の座標システム内で得て、グラフィカルデータ(例えば、興味のある部位)を第2の座標システム内で得る。第1の座標システムと第2の座標システム内の超音波トランスデューサの位置が決定され、第1及び第2の座標システム間の変換が、第1及び第2の座標システム内の超音波トランスデューサの位置に基づいて実行される。この変換を用いて、第1の座標システム内ですでに得ている超音波画像データを、グラフィカルデータと共に第2の座標システム内に登録して表示することができる。
(もっと読む)
処置支援システム
【課題】検者がナビゲーション画像を参照しながら被検体に処置を施す際の使い勝手を向上させた処置支援システムを実現する。
【解決手段】MRI装置で被検体の3次元ボリュームデータを撮像する(S101)。3次元ボリュームデータから切り出されたナビゲーション画像上で関心領域と穿刺針の進入計画経路を設定する(S102,103)。3Dナビゲーションを起動して穿刺針の位置及び姿勢を検出する(S104,105)。ここで、超音波撮像を開始して、被検体の超音波断層面の組織の弾性情報を得る(S106,107)。処置支援システムは、弾性情報に基づいて超音波断層面における超音波像関心領域をリアルタイムに検出することによりターゲット位置を検出し(S107)、ナビゲーション画像へ転送して反映する(S108,109)。検者は、超音波像関心領域を参照することにより現実のターゲット位置を把握できる。
(もっと読む)
針装置を用いるインターベンション中の記録済画像の再較正
対象の画像を提供するイメージング装置、針装置、及び処理装置を有するインターベンションシステムを利用する、インターベンション中の記録済画像の再較正が提案される。針装置は組織特性に対応するデータを提供するためのセンサを有する。処理装置はセンサからのデータを利用してイメージング装置によって提供される記録済画像とライブ画像のオーバーレイレジストレーションを実行するように構成される。従って、画像のオーバーレイの精度が増加する。  (もっと読む)
(もっと読む)
超音波診断装置
【課題】超音波画像において、穿刺針等の医療デバイスを明瞭に表示する。
【解決手段】ある1本の超音波ビームにおいて、医療デバイスの、超音波プローブに最も近い点Cを算出する。用いる医療デバイスの形状に関する情報を予め記憶しておく。最近点Cのピクセルp(0) から、当該医療デバイスの超音波ビームに沿った方向の寸法dorg をとり、この区間のピクセルp(0) 〜p(b) に対し、医療デバイスが存在することを示す情報を付与する。
(もっと読む)
血管内超音波イメージングシステムのカテーテル内の遠位に配置されるモータを形成および利用するためのシステムおよび方法
カテーテル内への挿入のために構成および配置されるイメージングコアは、回転可能な駆動軸の遠位端に設けられたミラーと、駆動軸に結合され、および回転可能な磁石と、磁石の少なくとも一部の周りに設けられた少なくとも2つの磁界巻線とを備えるモータであって、前記磁界巻線が、硬質のスロット付きの材料に設けられているモータと、前記モータと前記回転可能なミラーとの間に配置された少なくとも1つの固定変換器とを含む。駆動軸は、前記少なくとも1つの変換器を通って前記回転可能なミラーへの前記駆動軸の通過を可能にするように、磁石の開口を通って延びている。少なくとも1つの変換器導体は、前記少なくとも1つの変換器に電気的に接続されており、および前記カテーテルの近位端と電気的に連通している。少なくとも1つのモータ導体は、磁界巻線に電気的に接続されており、およびカテーテルの近位端と電気的に連通している。  (もっと読む)
(もっと読む)
1 - 20 / 112
[ Back to top ]