
Fターム[4C601GA25]の内容
Fターム[4C601GA25]に分類される特許
161 - 171 / 171
超音波探触子

【課題】 小型で電源ON時に素早く原点復帰することのできるエンコーダを備えた超音波探触子を提供する。
【解決手段】 音響素子1と、音響素子を揺動する駆動部2と、音響素子の回転角を検出するエンコーダ3とを備える。エンコーダは、磁気ドラムと、磁気ドラムが形成する磁界に基づき回転角度を検出する回転角度用磁界検出部と、原点を検出する原点用磁界検出部とを有し、磁気ドラムは、周方向に配列された3つの磁気領域を有し、第1磁気領域には、周方向にN極とS極の磁性体が交互に配置され、第2磁気領域には、エンコーダの回転軸方向にN極とS極の磁性体が層状に配置され、第3磁気領域には、磁性体が配置されていない、または、第2磁気領域に対して極性が逆になるようにN極とS極の磁性体が配置され、音響素子が原点に位置する状態において、第2磁気領域と第3磁気領域の境界を検出するように原点用磁界検出部が配置される。
(もっと読む)
磁気誘導医療システム

【課題】 体内等での制御可能範囲を広範囲にすること等ができる磁気誘導医療システムを提供する。
【解決手段】 ベッド31上の患者23の体内に挿入されるカプセル型医療装置72は、撮像した画像データを無線で送信し、体外に配置した受信アンテナ部73で受信すると共に、複数のアンテナを用いてカプセル型医療装置72の位置を算出する。その位置情報により誘導用の磁場発生部2が上面に取り付けられた平面移動機構77を移動して、磁場発生部2を誘導可能な位置に設定してカプセル型医療装置72に内蔵したマグネットに磁気的力を作用させることにより、カプセル型医療装置72が体内を広範囲に移動した場合にも制御できるようにした。
(もっと読む)
超音波探触子
【課題】超音波振動子を機械的に駆動する超音波探触子において、ギア機構で生ずる金属性の摩耗粉などの異物が磁気センサと磁気ドラムとの間の隙間に入り込まないようにする。
【解決手段】磁気ドラム面25Aの往復運動方向において、センサ面26Aを間において一対のローラー部材101を設ける。各ローラー部材101は、回転軸102と回転自在な筒状弾性体104とで構成される。各ローラー部材によって異物の隙間への進入が規制される。スリット板の円形スリット面を光学的センサで検出する場合において、光学的センサの前後にローラー部材を配置して異物進入を規制してもよい。
(もっと読む)
超音波探触子
【課題】超音波振動子を機械的に駆動する超音波探触子において、ギア機構で生ずる金属性の摩耗粉が磁気センサに到達しないようにする。
【解決手段】遊星ギア機構34の上側及び下側に一対の吸着部64,66を設ける。吸着部64,66は磁石68を有しており、その磁石による磁力により遊星ギア機構34で生じた摩耗粉は吸着部64,66で捕集される。これによって、摩耗粉が音響媒体中を浮遊して角度検出器24へ到達することを防止できる。媒体クリーニング手段としてはフィルタ部材などを利用することも考えられる。
(もっと読む)
医療診断システム
【課題】機能面及び形態面の両面から総合的に組織を診断できるようにする。特に、生体内の組織形態を認識しつつ活性部位の位置や分布などを認識できるようにする。
【解決手段】医療診断システムは核医学診断装置10と超音波診断装置12とロボット90とを有する。検出ユニット20は対向する一対の検出部22,24を有する。その検出ユニット20による一対の消滅γ線の検出により投影画像としての機能画像が形成される。その一方、超音波診断装置12においてはプローブ40によって超音波が送受波され、これによって形態画像としての超音波画像が形成される。機能画像と形態画像は並列に表示され、あるいは重合して合成表示される。両画像の位置的関係を表す情報も併せて表示される。
(もっと読む)
超音波診断装置
【課題】 簡単な構成で組立作業性が良く、高性能な超音波診断装置を提供することを目的とする。
【解決手段】 超音波診断装置は、超音波振動子を回転させる回転軸11を有している。回転軸11の先端側には、先端筒部25を有し、ここに信号伝達用のスリップリング32,33,34が装着されている。さらに、先端筒部25内には、棒状部20が挿入される。棒状部20は、複数の導電性筒体21をモールドしたもので、導電性筒体21の外周面でスリップリング32,33,34に接触すると共に、その先端部が超音波振動子に接続された端子に嵌合させられる。
(もっと読む)
ロボットガイドカテーテルシステム
【課題】
【解決手段】ロボットガイドカテーテルシステム(132)はマスター入力装置を備えるコントローラを備える。器具操作装置(16)はコントローラと通信し、かつマスター入力装置によって少なくとも部分的に生成される制御信号に応答する複数のガイド器具操作素子を含むガイド器具接続部を有する。細長いガイド器具(18)は、ベース、遠位端、及び挿通用内腔を有し、ガイド器具ベースはガイド器具接続部に操作可能に接続される。ガイド器具は該当するガイド操作素子に操作可能に接続され、かつガイド器具の遠位端に固定される複数のガイド器具制御素子を備える。これらのガイド器具制御素子は、ガイド器具に対して軸方向に移動することができるのでガイド器具遠位端の動きをマスター入力装置によって制御することができる。
(もっと読む)
術中ターゲティングのシステムおよび方法
本発明のいくつかの実施形態の方法は、ユーザが、患者の体内の表面下標的部位に医療器具を誘導するのを支援する方法である。この方法は、1つまたは2つ以上の術中画像を生成する。本方法は、画像上の標的部位を示す。本方法は、基準座標系中の標的部位の3D座標を決定する。本方法は、(1)基準座標系中の器具の位置を追跡し、(2)表示装置上に、基準座標系中のツールに関する位置から見えるような視野を投影し、(3)表示された視野上に、位置に対応する標的部位の印を投影する。いくつかの実施形態では、視野は、器具の位置からだけでなく、基準座標系中における器具の既知の方向性からの視界である。印を観察することによって、ユーザは、印が表示された視野内に所定の状態で置かれるか保持されるように、器具を移動させることによって、標的部位に向けて器具を誘導することができる。 (もっと読む)
血管の超音波画像を表示する装置及び方法
本発明は、血管内超音波画像(I)を用いて、血管(2)を表示する装置及び方法に関する。血管内超音波画像(I(E,x))のシーケンスは、プローブ(5)によって生成されるとともに、それらが生成された関連するロケーション(x)、関連する心拍フェーズ(E)及び/又は呼吸フェーズによってインデックスされる態様で、メモリ(10)に記憶される。その後の医学的介入の間、現在蛍光透視画像(At)の心拍フェーズに最も良く対応し又はカテーテル(13)の現在停止ロケーションに最も良く属する超音波画像(I1、I2、I3)が、メモリ(10)から選択され、モニタ(12)に表示されることができる。  (もっと読む)
(もっと読む)
超音波像映プローブ用の自動化された長手方向位置変換器
改良された医療用像映システムは、好ましくは、ハウジングを有する像映装置と、像映トランスジューサと、像映トランスジューサの近くに連結された位置マーカーとを備える。システムは、さらに、ハウジングに対して概して長手方向に像映トランスジューサを駆動可能なモータを備える。位置マーカーの追跡から得られたデータは、像映トランスジューサから得られたデータと相互に関連づけることができる。ある側面において、位置マーカーは、医療用位置決めシステムと通信可能なセンサとすることができる。
 (もっと読む)
(もっと読む)
体の臓器の動作を記録する機器及び方法
本発明は、例えば、心臓(9)といった体の臓器の特に呼吸によって引き起こされた動作を記録する機器及び方法に係る。横隔膜(10)の一部(3)は、X線装置又は超音波装置によって記録され、横隔膜の現在位置は、結果として得られる画像において検出される。他の内臓の関連付けられる位置についての情報は、モデルに支援されて横隔膜の位置から得ることが可能である。この情報は、カテーテル用のナビゲーションシステムにおいて使用可能であり、それにより、脈管系に対するカテーテルの空間座標を設定する。 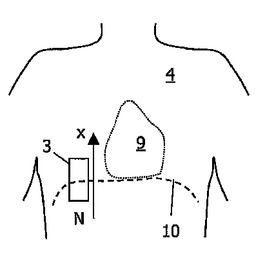 (もっと読む)
(もっと読む)
161 - 171 / 171
[ Back to top ]