
Fターム[4C601JC09]の内容
Fターム[4C601JC09]に分類される特許
101 - 120 / 437
超音波診断装置及び画像処理装置

【課題】壁運動解析を利用した画像診断の診断効率の向上を実現する超音波診断装置及び画像処理装置の提供。
【解決手段】画像生成部25は、超音波プローブ11からのエコー信号に基づいて被検体内の心臓形態に関する超音波画像のデータを生成する。また画像生成部25は、超音波プローブ11からのエコー信号に基づいて心臓の壁運動パラメータに関する運動情報解析画像のデータを生成する。表示部29は、超音波画像上に運動情報解析画像を重ね合わせてカラー表示する。入力部31は、カラー表示されている運動情報解析画像上の心筋輪郭に対する修正操作を、ユーザからの指示に従って入力する。表示制御部27は、修正操作が入力された場合、心筋領域のカラー表示を消去する、又はカラー表示の透過度を第1透過度から第1透過度よりも高い第2透過度に切替える。
(もっと読む)
画像内の解剖学的構造の検出およびマッチング方法、画像内の解剖学的構造のマッチング方法、および、画像内の解剖学的構造の検出およびマッチングシステム

【課題】外観ならびに形状を使用して解剖学的構造のマッチングを行う。
【解決手段】候補解剖学的構造の画像が受取られ、その画像から特徴が抽出され、類似に成形された解剖学的構造に関連付けされた特徴が、候補解剖学的構造と比較され、トレーニングセットから少なくとも1つのもっとも近い近隣の形状を使用することによって候補解剖学的構造の形状が決定される。
(もっと読む)
超音波システムおよびセンサ座標校正方法
【課題】本発明は、3次元CT映像と3次元超音波映像との間の映像整合を行って、センサの校正(calibration)を行う超音波システムおよびセンサ座標校正方法に関する。
【解決手段】本発明の超音波システムは、超音波プローブを含み、対象体の3次元超音波映像を形成する超音波映像形成部と、前記超音波プローブに連結されたセンサと、前記対象体の3次元CT(computed tomography)映像と、前記3次元超音波映像と前記センサとの間の位置関係に関する位置情報とを格納する格納部と、前記3次元CT映像と前記3次元超音波映像との間の映像整合を行って、前記センサの位置を前記3次元CT映像の対応する位置に変換するための第1の変換関数を形成し、前記第1の変換関数に前記位置情報を適用して、前記センサの校正を行うプロセッサとを備える。
(もっと読む)
サジタルビューを設定する超音波システムおよび方法
【課題】胎児のNT(nuchal translucency)の厚さを測定するためのサジタルビュー(sagittal view)を設定する超音波システムおよび方法を提供する。
【解決手段】本発明における超音波システムは、超音波信号を対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する超音波データ取得部と、前記超音波データを用いてボリュームデータを形成し、ユーザの入力情報に基づいて前記ボリュームデータに基準断面、基準点およびウィンドーを設定し、前記基準断面、前記基準点および前記ウィンドーに基づいてNT(nuchal translucency)の厚さを測定するためのサジタルビュー(sagittal view)を前記ボリュームデータに設定するプロセッサとを備える。
(もっと読む)
画像内の対象の検出方法
【課題】外観および形状を使用して対象の検出を行う。
【解決手段】画像のウインドウ内の分類器について特徴値が計算される。この特徴値が予め決定された閾値より上にあるか否かが決定され、特徴値が閾値より上にあるときに、画像のウインドウ内の後続の分類器について後続の特徴値が計算される。特徴値の値と後続の特徴とが組み合わされ、組み合わせた特徴値が現在の組み合わせのための組み合わせ閾値より上にあるか否かが決定され、組み合わせた特徴値が組み合わせ閾値より上にあるときには、さらに、後続の分類器がなくなるかあるいは組み合わせた特徴値が組み合わせ閾値より上でなくなるまで、後続分類器を含むように組み合わせた特徴値が計算され、最終的な組み合わせた特徴値を使用して、対象が検出されたか否かが決定される。
(もっと読む)
2次元超音波映像に対応する2次元CT映像を提供するシステムおよび方法
【課題】3次元超音波映像と3次元CT映像との間に映像整合を行って2次元超音波映像に対応する2次元CT映像を提供するシステムを提供する。
【解決手段】関心物体に対する複数の3次元CT映像を形成するCT映像形成部と、少なくとも1つの3次元超音波映像を形成する超音波映像形成部と、前記複数の3次元CT映像と前記少なくとも1つの3次元超音波映像との間に映像整合を行って第1の変換関数を取得するプロセッサと、入力情報を受信する使用者入力部とを備え、前記超音波映像形成部は、前記少なくとも1つの3次元超音波映像から前記入力情報に対応する2次元超音波映像を形成し、前記プロセッサは、前記入力情報および前記第1の変換関数を用いて前記複数の3次元CT映像から複数の2次元CT映像を取得し、前記2次元超音波映像と前記複数の2次元CT映像との間に複数の類似度を検出して前記2次元超音波映像に対応する2次元CT映像を選択する。
(もっと読む)
超音波診断装置及び画像データ表示用制御プログラム
【課題】管腔臓器の仮想内視鏡画像データを、常時、好適な方向からリアルタイムで観察する。
【解決手段】超音波診断装置100の芯線設定部7は、輪郭抽出部6が被検体に対する3次元走査によって収集されたボリュームデータを処理して抽出した管腔臓器の輪郭情報に基づいて該管腔臓器の芯線を設定し、基準点検出部9は、関心領域設定部8が前記ボリュームデータに対して設定した3次元関心領域の基準面と前記芯線とが交叉する基準点を検出する。次いで、視点・視線方向設定部10は、前記基準点における芯線の法線方向に視点を設定し、更に、この視点から前記基準点に向けて視線方向を設定する。そして、仮想内視鏡画像データ生成部11は、上述の視点及び視線方向に基づいた前記ボリュームデータのレンダリング処理によって仮想内視鏡画像データを生成し表示部15に表示する。
(もっと読む)
画像内の候補対象の変形可能な形状の検出および追跡方法、および、画像内の候補対象の変形可能な形状の検出および追跡システム
【課題】外観ならびに形状を使用して画像内の候補対象の変形可能な形状を検出および追跡する。
【解決手段】画像枠内の変形可能な形状の少なくとも1つのコントロールポイントを検出するステップ、候補対象に関連付けされた各コントロールポイントについて位置不確実性行列を計算するステップ、後続の画像枠内の変形可能な形状のダイナミクスを表し代表的な対象の画像のトレーニングデータセットからの統計的情報を含む形状モデルを生成するステップ、形状モデルを候補対象の変形可能な形状に位置合わせするステップ、形状モデルを変形可能な形状と融合するステップ、候補対象の現在の形状を評価するステップが実行される。
(もっと読む)
超音波診断装置及び医用画像処理装置
【課題】臓器などの関心部位の表面の凹凸を、簡易な処理でしかも高い再現性信頼性でもって発生すること。
【解決手段】超音波診断装置は、超音波プローブ12と、超音波プローブを介して被検体に対して超音波を送受信して、複数の走査面に関するエコー信号を発生する超音波送受信部21、22と、エコー信号に基づいて複数の走査面にそれぞれ対応する複数の断層像のデータを発生する画像データ発生部25と、複数の断層像から特定部位に関する複数の輪郭をそれぞれ抽出し、抽出した複数の輪郭にそれぞれ対応する複数の平滑曲線を平滑化処理により発生し、複数の断層像から複数の平滑曲線上の複数の1次元輝度列を発生し、それぞれ対応する走査面の位置に従って配列することにより特定部位の表面凹凸を輝度表現する表面画像を構築する表面画像再構成部31とを具備する。
(もっと読む)
臓器虚血モニタ
【課題】マイクロナノテクノロジーを用いた微小電気機械システム(MEMS)技術と精密機械加工技術を組み合わせて、カテーテルにマイクロセンサを実装し、直接的に脊髄を栄養する血管の血流速を測定し、術中にリアルタイムで脊髄虚血をモニタリングできる新たなシステムを開発すること。
【解決手段】体内に挿入、留置されるカテーテルチューブにおいて、カテーテル先端に搭載されたドプラ超音波血流速センサにより臓器虚血を監視する。
(もっと読む)
輪郭抽出装置およびプログラム
【課題】対象物の輪郭を柔軟かつ適切に抽出する技術を提供する。
【解決手段】エネルギー関数設定部13が、輪郭曲線の状態に対応して定義される複数種類のエネルギー項の重み付き線形和により表され、抽出すべき輪郭の形状に近づくほど、その値が小さくなるように定式化されたエネルギー関数を設定し、繰り返し演算処理部14が、エネルギー関数を繰り返し演算により最小化させる。重み付け係数変更部15は、繰り返し演算の過程で輪郭曲線に含まれる独立した線の本数が変動したか否かを監視しており、この本数が変動した場合に、エネルギー関数の重み付け係数を変更する。
(もっと読む)
動きベクトルを提供する超音波システムおよび方法
【課題】動いている関心物体の動きベクトルを提供する超音波システムおよび方法を提供する。
【解決手段】本発明による超音波システムは、超音波信号を対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、超音波データを取得する超音波データ取得部と、前記超音波データを用いて、前記対象体のBモード(brightness mode)映像と、前記対象体のカラードップラモード映像とを形成する映像形成部と、前記Bモード映像に前記対象体内で動いている関心物体を含む関心領域を設定する関心領域設定部と、前記超音波データおよび前記カラードップラモード映像を用いて前記関心物体の動きベクトルを形成し、前記動きベクトルを前記カラードップラモード映像に設定するプロセッサとを備え、前記超音波データは、前記関心領域に対応する前記対象体の部分における前記関心物体の速度情報を含んでいる。
(もっと読む)
超音波診断装置及び超音波画像処理プログラム
【課題】 三次元画像上において、比較しようとする対象領域間の三次元的な位置関係を、定量的且つ迅速に把握することができる超音波診断装置及び超音波画像処理プログラムを提供すること。
【解決手段】 穿刺針を用いて患部(治療対象)をラジオ波焼灼治療(RFA)を行う場合に、RFA治療前検査、RFA治療中、RFA治療後検査のそれぞれの場面において、異なるボリュームデータ間の空間的な位置対応付けを実行し、位置対応付けされたボリュームデータ群を用いて、比較しようとする対象領域間の三次元的な位置関係を、定量的且つ迅速に把握可能な支援情報を提供する。
(もっと読む)
超音波診断装置
【課題】複数の超音波画像を利用した計測を容易且つ正確に実行することのできる超音波診断装置を提供する。
【解決手段】超音波の送受により得られたエコー信号から被検体内部の情報を表す超音波画像を生成する超音波診断装置において、所定の表示装置15の画面上に複数の超音波画像を表示させる表示制御手段14と、前記複数の超音波画像のうち1つの画像上に計測範囲を指定するためのマーカを表示させる第1のマーカ表示手段20と、前記マーカの位置、大きさ、又は角度をオペレータに設定変更させるマーカ設定手段17と、前記複数の超音波画像のうちの他の画像上に、前記マーカ設定手段によって設定されたマーカと同一のマーカを表示させる第2のマーカ表示手段20と、前記複数の超音波画像のそれぞれにおいて、前記マーカによって指定された計測範囲について所定の計測を行う計測手段16とを設ける。
(もっと読む)
超音波診断装置
【課題】超音波画像において、穿刺針等の医療デバイスを明瞭に表示する。
【解決手段】ある1本の超音波ビームにおいて、医療デバイスの、超音波プローブに最も近い点Cを算出する。用いる医療デバイスの形状に関する情報を予め記憶しておく。最近点Cのピクセルp(0) から、当該医療デバイスの超音波ビームに沿った方向の寸法dorg をとり、この区間のピクセルp(0) 〜p(b) に対し、医療デバイスが存在することを示す情報を付与する。
(もっと読む)
超音波診断装置
【課題】境界検出用閾値の大きさをマニュアル補正することによりトレースラインを上方又は下方へ移動させる場合に、補正用つまみの回転方向とトレースラインの移動方向とが逆になる場合があった。
【解決手段】閾値を増加させると断層画像300上においてトレースライン326,328が上方へ移動する順対応関係が成立している場合には、つまみ330Aの時計回り操作により閾値を増加させ、つまみ330Bの反時計回り操作により閾値を減少させる。一方それとは逆に、閾値を増加させると断層画像300上においてトレースライン338,340が下方へ移動する逆対応関係が成立している場合には、つまみ330Bの時計回り操作により閾値を減少させ、つまみ330Bの反時計回り操作により閾値を増加させる。つまみの回転量を表すガイダンスを表示するようにしてもよい。
(もっと読む)
超音波診断装置
【課題】2つの境界線の間において距離計測を行う場合に、2つの境界線の検出精度を高める。
【解決手段】内側境界線及び外側境界線が含まれるように関心領域が設定される。x方向の各座標において探索ライン58が設定され、探索ライン58上において仮閾値を利用して基準エッジ点(第1区間点)が検出され、それに基づいて第2区間点及び第3区間点が決定される。各探索ライン上での3つの区間点により、内側帯領域84及び外側帯領域86が定義される。各帯領域84,86を参照することにより部分ヒストグラムが生成され、それに基づいて閾値が決定される。そのように決定された閾値を用いて境界線(内側境界線、外側境界線)が検出される。
(もっと読む)
医用画像処理装置、超音波診断装置および医用画像診断装置
【課題】検査対象物について自動的に抽出された輪郭をユーザの希望に応じて自動的に補正して正しい輪郭を容易に特定可能とする。
【解決手段】画像解析部29は、被検体内の検査対象物の形態を表す医用画像に基づいて検査対象物についての表面の輪郭を抽出する。画像解析部29は、抽出した輪郭に関する特徴値として2つの輪郭どうしの間の厚みを測定する。制御プロセッサ26は、ユーザ指示に応じて補正率を設定し、上記の測定された特徴値を上記の設定した補正率に従って変化させるように輪郭を補正する。
(もっと読む)
超音波診断装置
【課題】2つのトレースライン間において距離計測を行う場合に、距離計測方向を適切に定める。
【解決手段】第1トレースライン200上において注目点Piを含む第1トレースライン部分200Aが特定され、それに対応して、第2トレースライン202上において第2トレースライン部分202Aが特定される。2つのトレースライン部分が重み付け合成処理された上で、その合成結果に基づいて近似直線Lが定義される。近似直線Lに直交する方向、具体的には注目点Piを通過する直交方向として直交線Mが定義される。その直交線Mが距離計測方向となる。直交線M上に参照画素が存在しない場合には、直交線Mの最近傍点として計測点Riが定められる。
(もっと読む)
画像ガイド下前立腺癌針生検のためのシステムおよび方法
画像ガイド下前立腺眼針生検において、前立腺の第1の画像を前立腺の第2の画像と一致させる第1のレジストレーションを行う(210)。前立腺の第3の画像を取得し、3次元(3D)画像に合成する(220)。合成3D画像中の前立腺をその境界を示すためにセグメント化する(230)。第1の画像と合成3D画像の前立腺の境界から生成された距離マップについて第2のレジストレーションと、第2のレジストレーションとは異なる第3のレジストレーションとを行い、ここで、第2のレジストレーションおよび第3のレジストレーションは前立腺の生体力学的性質に基づいている(240)。第1の画像中の対象領域を合成3D画像または第2のモダリティを用いて取得された前立腺の第4の画像にマッピングする(250)。 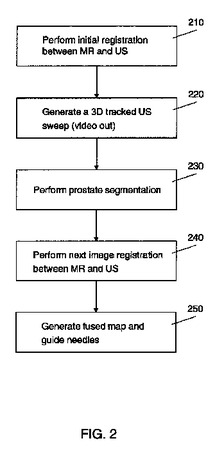 (もっと読む)
(もっと読む)
101 - 120 / 437
[ Back to top ]