
Fターム[4F035CB29]の内容
Fターム[4F035CB29]に分類される特許
21 - 30 / 30
塗装装置
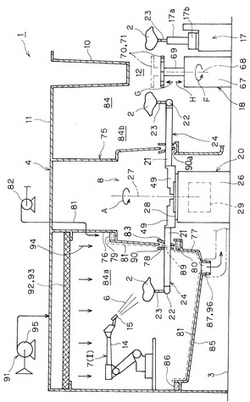
【課題】ワークを噴霧塗料により塗装するようにした塗装装置に対する保守作業が、より容易にできるようにする。
【解決手段】ワーク2に対し塗料6を噴霧可能とする塗装機7と、ブース4の内部に収容され、ワーク2を支持してこのワーク2を塗装機7の噴霧方向に対向可能とさせるワーク支持装置8とを設ける。このワーク支持装置8は、縦向きの軸心回りに回動A可能とされる回動体28を有する回動装置20と、回動体28から径方向外方に突出し、その突出端側22にワーク2を支持して回動体28と共に回動Aする支持アーム24とを備える。回動装置20および支持アーム24の基部側21を収容し、これら回動装置20および支持アーム24の基部側21と、塗装機7、支持アーム24の突出端側22およびこの突出端側22に支持されるワーク2との間を仕切る仕切体75を設ける。
(もっと読む)
洗浄装置

【課題】水平に連続回転する2台のロータリー洗浄装置間で、洗浄ノズルの干渉を避ける洗浄ノズル移動手段を備えることにより、直接容器を受渡し可能とした洗浄装置を提供する。
【解決手段】連続回転する回転体の一定半径の円周上で等ピッチに支えられた倒立容器の開口部を通し、容器の内側に向かって上方に洗浄水を噴出し、容器の内部を洗浄する複数の洗浄ノズルを備えた2台のロータリー洗浄装置(洗浄装置1、洗浄装置2とする)間で、容器の間隔ピッチ速度を同調して容器を受渡しするとき、洗浄装置1の洗浄ノズルを保持する回転体の外周を駆動カムとして洗浄装置2の洗浄ノズルを移動させる洗浄ノズルの移動手段を備えることにより、洗浄ノズル間の干渉を避けるようにした洗浄装置。
(もっと読む)
洗浄装置
【課題】洗浄液の噴射によって被搬送物が停滞するようなことがなく、被搬送物を安定して搬送できる洗浄装置を提供する。
【解決手段】洗浄装置1は、水平姿勢の容器Wを搬送する水平搬送手段2と、傾斜姿勢の容器Wを傾斜姿勢に保持しながら搬送する傾斜搬送手段3とを備える。洗浄装置1は、水平搬送手段2から容器Wを受け取りこの受け取った容器Wを水平姿勢から傾斜姿勢に姿勢変更しつつ傾斜搬送手段3に向けて案内する姿勢変更案内手段4と、傾斜搬送手段3にて搬送中の傾斜姿勢の容器Wに向けて洗浄液を噴射する洗浄液噴射手段6とを備える。
(もっと読む)
少量排気自動塗装システム及び被塗装物フィーダー
【課題】
塗装室特にスプレー用塗装室は、塗料ミストを捕集し被塗装物等への不要な付着を避けるために室内の空気を常に吸引排気処理しているが、その排気のために室内の空調した空気が排気され、膨大なエネルギー損失になっている。塗料ミストの飛散する領域を限定し、ミスト捕集に必要な排気量を削減す。
【解決手段】
塗装室内に配置した被塗装物に対し、塗装ロボットに搭載されて作動するスプレーガンで塗装するにあたり、搬送装置のホルダーに載置された被塗装物の塗装面を、スプレーガンを移動させる代わりに、ホルダー側を前後や回転移動さらには傾斜移動等の手段で制御し塗装を行う。スプレーガンの操作信号と搬送装置のホルダーの駆動とは塗装ロボットの制御装置により任意の設定位置で相互に連動させることで、スプレーガンの吹付けを排気装置に向けて集中させ、小さく排気量の少ない塗装室での塗装が可能となる。
(もっと読む)
表面塗布装置及び表面塗布方法
【課題】塗布した加工品の表面への塗料噴霧の再沈着及び塗料噴霧による汚染を抑えられる塗布装置及び方法の提供。
【解決手段】塗布装置1は加工品3の面に塗料を塗布する塗布ノズル2及び塗料蒸気及び/又は塗料噴霧を含んだ空気を吸引する吸引装置を有し、塗布ノズル2と加工品3は相対的に可動に構成している。塗布ノズル2の開口部9を覆うように配置した吸引ベル4を噴霧ノズル2のノズル壁14に強固に連結する。吸引ベル4は内部ベル5及び外部ベル6を含んで構成され、加工品3から僅かな間隔を隔てて配置されている。外部ベル6は内部ベル5を覆うように、互いに離れた状態を保って配置され、内部ベル5が噴霧室7を形成し、外部ベル6及び内部ベル5はその間に吸引口10を有する吸引室8を形成する。
(もっと読む)
作業設備
【課題】 ワークの位置を常に正確に検出することができる作業用ロボットの制御装置を提供すること。
【解決手段】 作業設備Eは、ワークを搬送する搬送装置2と、この搬送装置2により搬送されるワークに対し作業を行う作業ロボット1とを備えている。搬送装置2は、搬送経路を規定するレール29と、ワークの一つに対して複数設定されレール29上を走行するトロリ22と、このトロリ22間を連結する連結バー23と、トロリ22または連結バー23上に固定されワークを位置決めした状態で載置可能な搬送台24と、少なくともトロリ22および連結バー23の移動量Sを検出するセンサ3とを備えている。作業ロボット1は、センサ3で検出したトロリ22および連結バー23の移動量Sに基づき制御されてワークに対し作業を行うように構成されている。
(もっと読む)
コーティング装置
【課題】スプレーノズルの設置時や交換時の作業性が良く、しかも、構造の複雑化を伴わず、かつ、レイアウト面でも有利なコーティング装置を提供する。
【解決手段】回転ドラム2は、水平線に対して傾斜した軸線A回りに回転駆動され、その傾斜上方側となる一端部に開口部5を有している。スプレーノズルユニット10は、旋回アーム34に対して着脱自在に装着され、旋回アーム34は旋回軸34cを中心として旋回可能である。旋回アーム34の旋回動作により、スプレーノズルユニット10を回転ドラム2の内部と外部との間で出し入れすることができる。
(もっと読む)
液状物質塗布機の昇降装置
被塗布体と吹付けアセンブリーとの距離を調節可能な液状物質塗布機の昇降装置が開示される。昇降装置は、所定の本数が立設され、その外周面には螺旋状ネジ山が形成されると共に、駆動モーターにより選択的に回転する回転軸と、被塗布体が載置される移送テーブルを支持するように前記回転軸に配設され、内面には前記螺旋状ネジ山と嵌合する螺旋状ネジ山が形成されると共に、前記回転軸が回転することにより前記移送テーブルを昇降させる昇降部材と、を備える。 (もっと読む)
スプレー塗装装置
コンベヤー2によって移動される円形の対象物の正面/背面16、特に、ホール及びリム4の正面16をスプレー塗装するためのスプレー塗装装置。スプレー装置80,81が、弓形に往復回転可能であり、駆動回転軸線66に対して偏心している。対象物4の駆動回転軸線66及び中心軸線14は互いに一直線である。 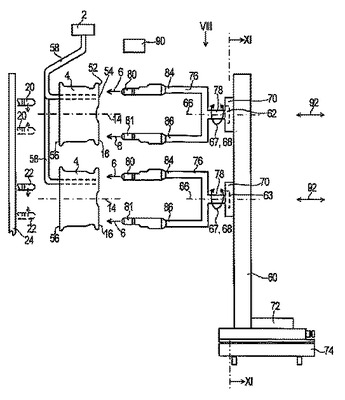 (もっと読む)
(もっと読む)
懸吊式ワーク搬送装置
【課題】スペースの有効利用が図れるばかりでなく、エアシリンダや制御モーター、電子機器等のコストの嵩む機器の使用を削減し、シーケンス作業工程の自動化を経済的に行なうことができる懸吊式ワーク搬送装置を提供する。
【解決手段】 ハンガー2にキャッチングアーム53を設け、該アーム53を閉鎖方向に付勢するバネ55と、キャッチングアーム53を開放するキャッチングアーム開閉装置56を備える。ハンガー2には、これを横方向に回動する横方向回転ギア52と横方向転換装置51を設け、アーム53には、キャッチングハンド59を縦方向に回動する縦方向回転ギア61と縦方向転換装置60を設ける。ライン側には、アーム開閉装置56を作動する開閉ガイド58と、横方向回転ギア52を駆動するチェーン13と、横方向転換装置51を作動するガイド36、36と、縦方向回転ギア61を駆動するチェーン63と、縦方向転換装置60を作動する転換ガイド62を設ける。
(もっと読む)
21 - 30 / 30
[ Back to top ]