
Fターム[4L056EA17]の内容
Fターム[4L056EA17]に分類される特許
1 - 16 / 16
糸巻取機及び糸巻取ユニット
【課題】巻き取り開始直後の糸速度を正確に取得可能な糸巻取機を提供する。
【解決手段】精紡機は、巻取装置13と、紡績装置9と、ロータリエンコーダ機構と、糸継装置43と、継目モニタ47と、台車制御部と、を備えている。巻取装置13は、パッケージ45に紡績糸10を巻き取る。紡績装置9は、巻取装置13に紡績糸10を供給する。ロータリエンコーダ機構は、パッケージ45の回転速度を検出するためのものである。糸継装置43は、紡績装置9とパッケージ45との間の紡績糸10を糸継ぎして継ぎ目99を形成する。継目モニタ47は、紡績糸10の走行方向で糸継装置43の下流側に配置され、継ぎ目をモニタする。台車制御部は、ロータリエンコーダ機構の検出結果に基づいて取得した紡績糸10の走行速度と、継目モニタ47によるモニタ結果と、に基づいて、糸継装置43が形成した継ぎ目が正常であるか否かを判断する。
(もっと読む)
糸巻取機及び糸巻取ユニット

【課題】糸継終了時に発生する糸のたるみを解消した糸巻取機を提供する。
【解決手段】糸継装置43は、紡績装置とパッケージとの間の紡績糸10を糸継ぎする。糸道規制部材(糸寄せレバー96及び糸押さえレバー98)は、紡績糸10に接触することで当該紡績糸10を屈曲させる位置と、前記紡績糸10を開放した位置と、の間で移動可能である。台車制御部は、糸道規制部材を、糸継ぎの際に紡績糸10に接触させて当該紡績糸10を屈曲させるとともに、当該糸継ぎの終了後、少なくとも巻取装置における紡績糸10の巻き取りが開始するまでの間は、紡績糸10を屈曲させた状態を維持するように制御する。
(もっと読む)
中央装置、情報処理システム、情報処理方法及びプログラム
【課題】複数工場に配置された繊維機械の複数の動作情報を記憶でき、また工場別の繊維機械の複数の動作情報及び異常情報を含む報告情報を生成することが可能な中央装置等を提供する。
【解決手段】クライアントコンピュータ2は、工場識別情報、機械識別情報、及び、ユニット識別情報と、繊維機械3及びユニット4の動作状況に関する複数の動作情報をサーバコンピュータ1へ送信する。サーバコンピュータ1は受信した複数の動作情報を、工場識別情報、機械識別情報及びユニット識別情報に対応付けて記憶部に記憶する。サーバコンピュータ1は記憶部に記憶した動作情報が閾値を超える場合に異常と判断する。また、工場識別情報別に、各繊維機械3及び該繊維機械3のユニット4の動作情報と、異常と判断された動作情報を特定する異常情報とを含む報告書を生成する。
(もっと読む)
紡績ユニット及び紡績機
【課題】吸込口部による紡績糸の糸端の予期せぬ吸い込みを防止する。
【解決手段】紡績ユニット2は、紡績糸10を供給する空気紡績装置9と、紡績糸10をパッケージ45に巻取る巻取装置28と、糸継ぎを行うスプライサ43と、パッケージ45から紡績糸10の糸端をサクションマウス104によって捕捉して、捕捉した紡績糸10の糸端をスプライサ43の糸継位置へ案内するサクションマウスモジュール46と、サクションマウス104を移動可能とするカム駆動機構53と、を備える。カム駆動機構53は、少なくとも、サクションマウス104の位置を、パッケージ45から紡績糸10の糸端を捕捉する捕捉位置、捕捉した糸端をスプライサ43の糸継位置へ案内する案内位置、及び、案内位置よりも捕捉位置から離れた位置であり、且つ、案内位置よりも、空気紡績装置9と巻取装置28との間の糸道から離れた退避位置、に移動させる。
(もっと読む)
糸巻取機及び糸巻取ユニット
【課題】糸継ぎ終了後の巻取再開時に発生する糸のたるみを解消した糸巻取機を提供する。
【解決手段】精紡機は、パッケージ45に糸を巻き取る巻取装置13と、巻取装置13に紡績糸10を供給する紡績装置9と、パッケージ45と紡績装置9との間の紡績糸を糸継ぎする糸継装置43と、移動手段30と、を備えている。移動手段30は、通常巻取時におけるパッケージ45と紡績装置9との間の糸道に対して接近した糸継位置と、糸道から離間した退避位置とに糸継装置43を移動可能にする。
(もっと読む)
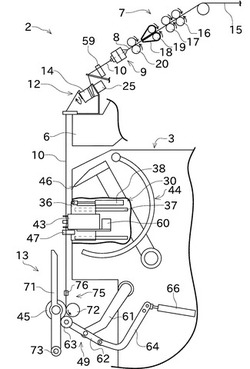
糸巻取機及び糸巻取ユニット
【課題】糸継装置を備える糸巻取機において、紡績糸の不良部分の除去及び糸継装置での糸継ぎを効率的に行うことができる構成を提供する。
【解決手段】精紡機は、紡績装置9と、巻取装置13と、糸継装置43と、糸貯留装置12と、カッタ55と、を備える。紡績装置9は、紡績糸10を供給する。巻取装置13は、紡績糸10をパッケージ45に巻き取る。糸継装置43は、糸走行方向において紡績装置9と巻取装置13との間の位置において、紡績装置9側の紡績糸10の糸端と巻取装置13側の紡績糸10の糸端とを糸継ぎする。糸貯留装置12は、糸走行方向において紡績装置9と糸継装置43との間の位置において、紡績糸10を一時的に貯留する。カッタ55は、糸走行方向において糸貯留装置12と糸継装置43の間の位置において、紡績糸10を切断する。
(もっと読む)
糸巻取機
【課題】 糸切断後に糸貯留ローラに残存する糸部分が、糸継後に巻取を再開したときにパッケージに巻取られてしまうことを防止可能な、糸巻取機を提供すること。
【解決手段】 精紡機1は、巻取装置12と、ヤーンクリアラ11と、カッター10と、弛み取り装置8と、糸継装置92と、機台制御部96を備えている。弛み取り装置8は、弛み取りローラ30と、弛み取りローラ30の表面の糸を検出する糸検出センサを有する。機台制御部96は、ヤーンクリアラ11により糸欠陥が検出されてカッター10により糸が切断されたときに、糸検出センサ34の検出結果に基づいて、糸継装置92に糸継を行わせるか否かを判断する。
(もっと読む)
紡績機
【課題】糸継時において、パッケージに糸品質の不安定な部分が混入してしまうことを防止できるとともに、糸端を捕捉するときに糸切れを良好に抑制できる紡績機を提供する。
【解決手段】精紡機は、糸貯留ローラ21と、糸掛け部材と、糸外しレバー28と、サクションパイプ44と、ユニットコントローラと、を備える。糸掛け部材は、紡績糸10を糸貯留ローラ21に巻付可能である。糸外しレバー28は、糸掛け部材から紡績糸10を外すことが可能である。サクションパイプ44は、紡績糸10の糸端を捕捉可能であり、捕捉した紡績糸10に撚りを掛けることが可能な撚掛けノズルを備える。ユニットコントローラは、サクションパイプ44が捕捉した紡績糸10が糸貯留ローラ21に巻かれている間は撚掛けノズルを作動させるとともに、糸外しレバー28が糸掛け部材から紡績糸10を外すまでに撚掛けノズルを停止させる。
(もっと読む)
繊維機械
【課題】糸処理ユニットの運転状態を容易に把握することができる繊維機械を提供する。
【解決手段】精紡機が備える複数の紡績ユニットのそれぞれは、当該紡績ユニットの運転状態が、複数の運転レベルの中でどの運転レベルに対応するかを表示するレベル表示部86を備えている。また、前記運転レベルは、基準となる基準運転状態が中央となるように区分されている。前記基準運転状態は、精紡機が複数備えた紡績ユニットの運転状態の平均値か、或いは所定の設定値とすることができる。
(もっと読む)
ブロワモータの制御方法とブロワシステム
【課題】センサなどの付加的な装置を用いることなくブロワを駆動するモータの回転数を制御でき、また、必要とする最低限の負圧を供給しながら、ブロワを駆動するモータの回転数を抑制でき、自動ワインダーを円滑に稼動させながら省エネルギー化を図る。
【解決手段】各ワインディングユニット1の糸継ぎ動作回数と、糸継ぎに失敗した失敗回数とを集計してシステム全体のミス率を算出する。算出したミス率に基づいて前記ブロワモータ18に電力を供給するインバータ19の出力周波数を増減制御する。
(もっと読む)
繊維機械
【課題】高い生産性を備える繊維機械を提供する。
【解決手段】自動ワインダ1は、給糸ボビン5から解舒され巻取管7に巻き取られる紡績糸Yに対して糸継を行う糸継装置20と、糸継装置20よりも上流側の紡績糸Yとしての下糸Y2を吸引して該下糸Y2を糸継装置20に案内する下糸案内装置64と、を有し、紡績糸Yを巻取管7に巻き取ってパッケージ6を形成する巻取ユニット2を複数で備える。複数の巻取ユニット2に、下糸案内装置64が下糸Y2を吸引したことを検知する下糸検知センサ66を設ける。自動ワインダ1は、下糸案内装置64が下糸Y2を糸継装置20に案内するに際し、下糸案内装置64が下糸Y2を吸引したことを下糸検知センサ66が検知したら、下糸Y2を糸継装置20に案内するように下糸案内装置64を制御する下糸案内動作制御部91を備える。
(もっと読む)
糸継ぎ装置および糸継ぎ方法
【課題】 巻取パッケージ側の糸端と給糸側の糸端とを糸継ぎする際に、巻取パッケージの表面を傷めずに巻取パッケージに巻かれた糸欠点部分を確実に捕捉し全て除去可能とする糸継ぎ装置および糸継ぎ方法を提供することである。
【解決手段】 糸継ぎ部材と、巻取パッケージの表面に接近して糸端を吸引して糸継ぎ部材まで案内する糸端捕捉手段1と、巻取パッケージを糸解舒方向に回転させる逆転手段2とを備えて、前記糸端捕捉手段1を、巻取パッケージの表面に接近して糸端を吸引する捕捉位置1Bと、糸の不良部分を連続吸引する吸引位置1Cと、吸引した糸端を糸継ぎ部材まで案内する待機位置1Aとに移動自在とする糸継ぎ装置Pとし、前記吸引位置1Cを巻取パッケージPW1から離れた位置とする糸継ぎ方法とした。
(もっと読む)
繊維機械
【課題】繋ぎ目の状態などを簡単にチェックできるように糸継ぎ動作を制御するチェックモードを有する。
【解決手段】給糸側からの糸Yを巻き取る巻取り手段5と、糸欠点を検出する手段32と、この糸欠点検出手段32で糸欠点を検出したときに、糸欠点を切断、除去して給糸側及び巻取側の各糸端Y1,Y2を繋ぐ糸継ぎ手段7とを備え、巻取り手段5及び糸継ぎ手段7の動作を司る制御手段15を備え、この制御手段15は、糸継ぎ手段7による各糸端Y1,Y2の糸継ぎ動作の途中又は終了後に、糸継ぎ手段7及び巻取り手段5の動作を中止するよう制御するチェックモードを有している。
(もっと読む)
風綿対策装置および自動ワインダー
【課題】 テンション装置等の各種の糸処理装置を介して糸を巻き取る際に、装置本体の主要部分への風綿の侵入や堆積を防止すると共に、装置本体内部への侵入も防止する構成とする風綿対策装置を提供し、該風綿対策装置を備え、少ない空気消費量で風綿の影響を抑制しながら巻取可能な自動ワインダーを提供することである。
【解決手段】 構成部品を内蔵するボックス状の本体ケーシング2から、糸を挟持するクランプ部材や糸をガイドするガイド部材を突設し、前記本体ケーシングにエア配管部材9を接続してケーシング内部に圧縮空気を供給してケーシング内部を昇圧すると共に、前記本体ケーシングの外側の所定位置に圧縮空気を吹き付けるノズル部材Nを複数設ける構成のテンション装置1とした。また、糸継ぎ動作のタイミングに同期して圧縮空気を供給する構成の前記テンション装置1を備える自動ワインダーとした。
(もっと読む)
繊維機械
【課題】 口出し成功率が良好で糸継時間を短縮できる繊維機械を提供する。
【解決手段】 糸10の巻取部12を備えた糸処理部2と、この糸処理部2に対して糸継ぎする糸継部(糸継台車)3と、を備える。前記糸継部3は、糸継作業を行う糸継装置43と、巻取部12の巻取パッケージ45の表面に接近して糸端を吸引してその糸10を前記糸継装置43に案内するサクションマウス46と、巻取パッケージ45を糸解舒方向に回転させる逆転ローラ55と、を備えている。サクションマウス46から吸引される糸の糸通路50には吸引検出センサ54が備えられる。口出し時において逆転ローラ55は当初は比較的低速で回転されるが、前記吸引検出センサ54が糸10を検出すると、増速制御される。
(もっと読む)
繊維機械ならびに継ぎ目を最適化する方法
本発明は、繊維機械、特にオープンエンド紡績機械であって、単数または複数の走行可能なメンテナンス装置が設けられており、該メンテナンス装置が、糸を新たに紡績開始するか、または糸切れ後に紡績開始するための手段を有しており、さらに、繊維機械を制御するための制御装置を装備している形式のものに関する。本発明により繊維機械は、繊維機械により搬送され連続的に通走する糸の糸張力および/または糸切れ張力を測定するための測定装置が設けられており、該測定装置が全体的にまたは部分的に繊維機械、メンテナンス装置またはその両者に配置されていることにより特徴付けられている。 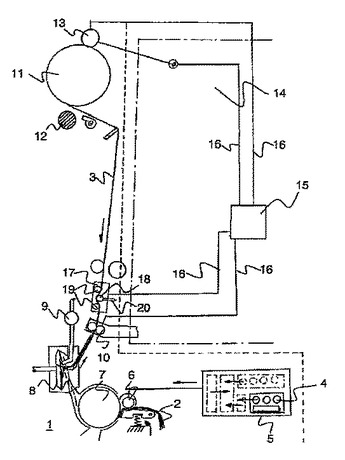 (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]