
Fターム[4L056EC65]の内容
紡績及び撚糸 (4,539) | 検出、制御の対象、内容、時期 (328) | 量 (127) | 位置 (18)
Fターム[4L056EC65]の下位に属するFターム
Fターム[4L056EC65]に分類される特許
1 - 13 / 13
紡績ユニット及び紡績機
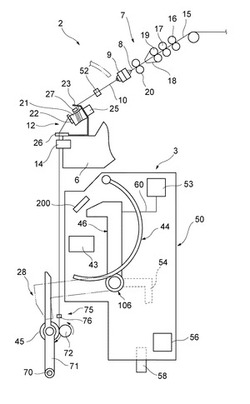
【課題】吸込口部による紡績糸の糸端の予期せぬ吸い込みを防止する。
【解決手段】紡績ユニット2は、紡績糸10を供給する空気紡績装置9と、紡績糸10をパッケージ45に巻取る巻取装置28と、糸継ぎを行うスプライサ43と、パッケージ45から紡績糸10の糸端をサクションマウス104によって捕捉して、捕捉した紡績糸10の糸端をスプライサ43の糸継位置へ案内するサクションマウスモジュール46と、サクションマウス104を移動可能とするカム駆動機構53と、を備える。カム駆動機構53は、少なくとも、サクションマウス104の位置を、パッケージ45から紡績糸10の糸端を捕捉する捕捉位置、捕捉した糸端をスプライサ43の糸継位置へ案内する案内位置、及び、案内位置よりも捕捉位置から離れた位置であり、且つ、案内位置よりも、空気紡績装置9と巻取装置28との間の糸道から離れた退避位置、に移動させる。
(もっと読む)
綾巻きパッケージ交換装置を運転する方法ならびに綾巻きパッケージ交換装置

【課題】綾巻きパッケージ交換装置を運転する方法であって、綾巻きパッケージ交換装置は、自動で、綾巻きパッケージを製造する繊維機械の作業部に対して機能し、作業部に対して機能するために様々な操作装置、特に旋回可能で移動可能に支承された、ヤーンリザーブを形成するためのヤーン処理エレメントを備えているものを改良して、綾巻きパッケージを製造する繊維機械の作業部の設置位置のずれを問題なく迅速かつ精確に求めるものを提供する。
【解決手段】綾巻きパッケージ交換装置23を、少なくとも綾巻きパッケージを製造する繊維機械1の最初の運転前に、繊維機械1の作業部2に順次位置決めし、測定装置によって、作業部2の設置位置を測定し、求めた値を、作業部2においてヤーン処理エレメント20をあとで精確に位置決めするために準備する。
(もっと読む)
繊維製造過程を最適化する方法
方法は、繊維最終製品を製造する繊維製造過程(101)を最適化するために用いられる。製造過程(101)が、要素として少なくとも1つのパラメータ(x1,・・・,xn)を持つパラメータ集合({x1,・・・,xn})を含む数学モデル(102)において製造過程(101)が表現される。パラメータ集合({x1,・・・,xn})のうち、少なくとも1つの変化パラメータ(xi)が、モデル(102)においてそれぞれ1つの変化(Δxi)だけ変化される(106)。少なくとも1つの変化(Δxi)が最終製品の財政的価値(P)に及ぼす影響が評価される(108)。評価(108)の出力に関係して、少なくとも1つの変化(Δxi)が製造過程(101)へ受け継がれる(109)。 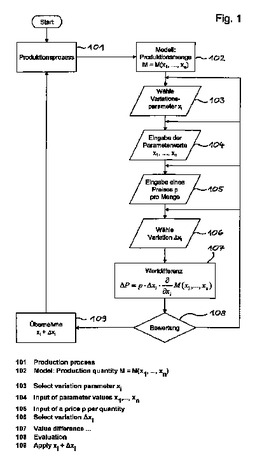 (もっと読む)
(もっと読む)
ドラフト装置のコンデンサ、及び紡績機
【課題】コンデンサ幅の調整をコンデンサの付け替えによって行わずに、1つのコンデンサにより効率良く調整できるドラフト装置のコンデンサを提供する。
【解決手段】スライバの幅方向に移動自在である第1スライバ規制部材71aと、スライバの幅方向に移動自在である第2スライバ規制部材71bと、第1スライバ規制部材71aと第2スライバ規制部材71bとを互いに接近又は離間する方向へ連動させて、第1スライバ規制部材71aと第2スライバ規制部材71bとの間に形成される、スライバの通過可能な幅であるコンデンサ幅を可変とする連動機構70とを備えたドラフト装置2のコンデンサ26である。
(もっと読む)
粗紡機におけるボビンレール昇降装置
【課題】紡出時以外のボビンレールの昇降時における衝突等の異常が生じても、昇降機構の損傷を回避することができる粗紡機におけるボビンレール昇降装置の提供にある。
【解決手段】昇降機構を介して昇降するボビンレール22と、該ボビンレール22を昇降させる昇降用モータ36と、昇降用モータ36を駆動制御する制御手段45とを有し、制御手段45は、紡出時における昇降用モータ36の高トルク制限値も低く設定された低トルク制限値を、紡出時以外のボビンレール22の昇降時における昇降用モータ36の出力トルクの制限値として設定する機能を有する。
(もっと読む)
作業台車の位置決め機構
【課題】主としてインデックスプレートがレールに接触しないようにすることである。
【解決手段】作業台車1の走行を案内するレール2aと、レール2aに配設されたインデックスブロック4と、作業台車1に設けられ、インデックスブロック4に係合して作業台車1を位置決めするインデックスプレート3とを備え、インデックスプレート3は、作業台車1が走行する際には、インデックスブロック4に係合しないようにレール2aから退避し、作業台車1が停止する際には、レール2aから若干離れた位置まで近接して、インデックスブロック4に係合する。
(もっと読む)
玉揚げ装置を有する繊維機械
【課題】玉揚げ作業の目標設定において、玉揚げ装置の走行制御機構の負担を軽減しようとすると、巻取りユニットの稼動効率を低下させてしまう。
【解決手段】各巻取りユニット2におけるパッケージ7の巻取り長さの大小を認識する巻取り状態認識手段30bと、巻取り長さが満管にある巻取りユニット7を最優先に、次いで満管に近い巻取りユニット7を優先する順序で、玉揚げ作業の実行目標とする巻取りユニット2を設定する目標設定手段30cと、玉揚げ作業の実行目標とする巻取りユニット2に玉揚げ装置3が到達してから、その巻取りユニット2で形成されているパッケージ7が満管となるまで、玉揚げ装置3に玉揚げ作業の実行を待機させる作業待機手段30dと、を備える。
(もっと読む)
撚糸機
【課題】給糸カバーがバルーン糸に従動回転することによる不具合発生を防止することができる撚糸機を提供する。
【解決手段】静止ディスク5に載置された給糸パッケージ8の周囲を覆う給糸カバー6が静止ディスク5と一体的に設けられていると共に、静止ディスク5の下方に配置された回転ディスク7から径方向に導出された糸Y2が給糸カバー6の周囲でバルーンを形成するようになっている撚糸ユニットを複数備えた撚糸機であって、撚糸ユニットはそれぞれ、静止ディスク5または給糸カバー6が所定位置に静止しているか否かの判別を行うようになっており、さらに、静止ディスク5または給糸カバー6が所定位置に静止していないと判別した場合、作動しないようになっている撚糸機とした。
(もっと読む)
スピンドルのタンゼンシャルベルト駆動手段を備えたリング精紡機
【課題】1つのモータによって駆動されるスピンドル数、各モータの出力、スピンドルの最大消費電力及びベルトによって伝達される相対出力に最適化された各モータ間の間隔を設定すること。
【解決手段】タンゼンシャルベルト3で駆動される複数のスピンドルを備え、前記タンゼンシャルベルト3が該タンゼンシャルベルト3の駆動方向に沿って互いに間隔をもって配置されたモータによって駆動されるリング精紡機において、モータと駆動プーリ4で構成された駆動ユニット5によって駆動されるスピンドルの数及び互いの間隔を、スピンドルの消費電力、駆動ユニット5におけるモータの出力及びタンゼンシャルベルト3によって伝達される相対出力に合わせて可変に構成した。 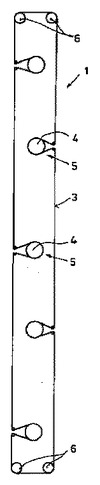 (もっと読む)
(もっと読む)
ドラフト装置におけるクレードルのローラ接圧切替装置
【課題】ドラフト装置におけるクレードルのローラ接圧を、プレス状態からリリース状態に、並びにリリース状態からプレス状態に一斉に切り替え得るようになしたローラ接圧切替装置を提供することにある。
【解決手段】複数個のトップローラと、これに対応する複数個のボトムローラとを備え、前記各トップローラと各ボトムローラとを接圧付勢手段を介して接圧状態を維持してスライバをドラフトするドラフト装置において、前記接圧付勢手段によるローラ接圧をプレス状態からリリース状態に、並びにリリース状態からプレス状態に一斉に切替えるローラ接圧切替手段1を設けたことを特徴とするドラフト装置におけるクレードルのローラ接圧切替装置である。
(もっと読む)
精紡機用ダブルエプロン式ドラフト装置
【課題】精紡機用ダブルエプロン式ドラフト装置であって、何らかの障害となる部材によって楔形間隔領域を損なわない装置を提供する。
【解決手段】デリベリニップラインを有しかつ被動デリベリローラとこれに対して弾力的に押付けられる加圧ローラとを含むデリベリローラ対と、さらに、前段に設けられデリベリニップラインの領域でステープルスライバを案内しかつこれとで楔形間隙を形成するエプロン対と、エプロン対の領域でデリベリローラの周面を包み込みかつこの周面とで狭い隙間を形成するカバーとを備えたものにおいて、カバー18が楔形間隙15の外側に配置され、隙間17が負圧管路20の吸引口19に接続されており、精紡工程中断時にカバー18も吸引口19もデリベリローラ11から僅かに離反動可能である。
(もっと読む)
エアジェットスピニング法における一定の接合材料
本発明は、繊維束(2)を延伸するためのドラフト機構(1)を始動する方法に関する。このためにドラフト機構(1)は、少なくとも1つの前方のローラ対(3)と、ニップライン(5)を有する後方のローラ対(4)とを備えており、この場合ドラフト機構(1)を始動するために繊維束端部(6)が提供されるようになっている。本発明によれば、ドラフト機構(1)の始動時に、前方のローラ対(3)の回転数経過および後方のローラ対(4)の回転数経過において加速からの進入過程が終了していて、はじめて繊維束端部(6)が後方のローラ対(4)のニップライン(5)に進入する。 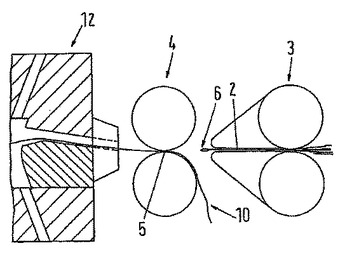 (もっと読む)
(もっと読む)
糸を回転駆動される巻き取りボビンに横振り供給するための糸ガイド
本発明はテキスタイル機械の巻き取り装置内であや振りボビンを生ぜしめるために回転駆動される巻き取りボビン(1)に糸(5)を横振り供給するための糸ガイド(6)に関する。本発明の課題は、このような糸ガイドの駆動装置を改善することである。本発明によればこの課題は、電気機械的な駆動装置(15,15′,15″,16,16′,18,18′)が磁界内に位置するエアギャップ(17)を有しており、このエアギャップに沿って複数の磁石(18,18′)が配置されているようにすることによって、解決される。糸ガイド(6)にはエアギャップ(17)内に漬かる少なくとも1つの電気コイル(15)が配置されている。この電気コイルには制御して電流を流すことができる。 (もっと読む)
1 - 13 / 13
[ Back to top ]