
Fターム[5B050CA02]の内容
Fターム[5B050CA02]に分類される特許
1 - 20 / 32
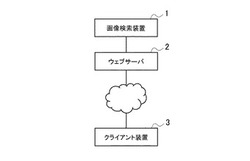
画像検索装置およびプログラム
【課題】GPUのように同種の処理を大量に行う能力の高いハードウェアを用いて、画像検索処理を高速化すること。
【解決手段】画像検索装置1は、共通メモリと、同一の命令を実行する複数の並列のプロセッサを含む。画像検索装置1は、記憶手段から、複数の画像特徴ベクトルを含む複数のクラスタをそれぞれ代表する複数の代表特徴ベクトルを転送し、クエリとなる画像から抽出される1または複数のクエリ特徴ベクトルを前記共通メモリに格納し、前記転送された複数の代表特徴ベクトルと前記クエリ特徴ベクトルとの距離を前記複数の並列のプロセッサを用いて計算し、前記第1の距離計算手段による計算結果により選択されるクラスタに属する画像特徴ベクトルと、前記クエリ特徴ベクトルとの距離に基づいて、複数の画像のうちいずれかを選択する。
(もっと読む)
グラフィックスプロセッサ上の物理シミュレーション

【課題】本発明は、少なくとも1つのグラフィクスプロセッサユニット(GPU)上で物理シミュレーションを行うための、方法、コンピュータプログラム製品、およびシステムに向けられる。
【解決手段】該方法は、以下のステップを含む。まず、少なくとも1つのメッシュに関連した物理属性を表すデータは、複数のメモリアレイに格納されることによって、シーンに描写される少なくとも1つのメッシュの運動を支配する線形方程式系を設定する。ついで、少なくとも1つのピクセルプロセッサを用いて複数のメモリアレイにおけるデータに演算が行われることによって、時刻に対する線形方程式系を解く。ここで、時刻に対する線形方程式系に対する解を表す変更されたデータは、複数のデータメモリに格納される。
(もっと読む)
衝突検出システム、ロボットシステム、衝突検出方法及びプログラム
【課題】衝突検出対象オブジェクトの正確な衝突判定を実現できる衝突検出システム、ロボットシステム、衝突検出方法及びプログラム等の提供。
【解決手段】衝突検出システムは処理部と描画部と深度バッファーを含む。深度バッファーには、対象面に配置設定されるオブジェクトの深度情報を深度マップ情報が設定される。描画部は、深度テストを行って、深度バッファーを参照しながら、衝突検出対象オブジェクトを構成するプリミティブ面のうち、所定の視点から見て裏面のプリミティブ面を描画する第1の描画処理を行う。また深度テストを行わずに、衝突検出対象オブジェクトを構成するプリミティブ面のうち、視点から見て裏面のプリミティブ面を描画する第2の描画処理を行う。処理部は、第1の描画処理と第2の描画処理の結果に基づいて、衝突検出対象オブジェクトが対象面のオブジェクトと衝突したか否かを判定する衝突判定を行う。
(もっと読む)
グラフィックスプロセッサ上の物理シミュレーション
【課題】グラフィクスプロセッサを提供すること。
【解決手段】本発明は、少なくとも1つのグラフィクスプロセッサユニット(GPU)上で物理シミュレーションを行うための、方法、コンピュータプログラム製品、およびシステムに向けられる。該方法は、以下のステップを含む。まず、少なくとも1つのメッシュに関連した物理属性を表すデータは、複数のメモリアレイに格納されることによって、シーンに描写される少なくとも1つのメッシュの運動を支配する線形方程式系を設定する。ついで、少なくとも1つのピクセルプロセッサを用いて複数のメモリアレイにおけるデータに演算が行われることによって、時刻に対する線形方程式系を解く。ここで、時刻に対する線形方程式系に対する解を表す変更されたデータは、複数のデータメモリに格納される。
(もっと読む)
画像処理装置及びその制御方法
【課題】映像データとグラフィックスデータとを異なるデータ転送経路を用いて同期転送する画像処理装置において、映像データ用の転送経路の転送速度を変更する際にグラフィックスデータの転送が途絶することを抑制する。
【解決手段】映像転送経路と、グラフィックスデータを転送する経路であって映像転送経路と等しい転送速度に制御される第1の転送経路と、グラフィックスデータを転送する経
路であって映像転送経路とは独立して転送速度が制御される第2の転送経路と、グラフィ
ックスデータ転送経路を第1の転送経路又は第2の転送経路のいずれかに切り換える切換部と、第1の転送経路を介してグラフィックスデータの転送が行われている場合に映像転送
経路の転送速度を変更する処理が行われるときは、当該処理の開始から完了までの期間中におけるグラフィックスデータの転送経路を第2の転送経路へ切り換える。
(もっと読む)
プログラム、情報記憶媒体及び画像生成装置
【課題】より高速な並列処理を実現すること。
【解決手段】ヒット判定を、メインプロセッサエレメント(MPE10)と複数のサブプロセッサエレメント(SPE)12とで並列処理で実行する。MPE10とSPE12それぞれが分担するノード(ポリゴン集合)の数は、過去のSPEのヒット判定処理結果に基づいてSPEの処理負荷を予測する予測関数f(X)に基づいて、MPE10のヒット判定の処理負荷と、SPE12のヒット判定の処理負荷とがほぼ同等となり、ほぼ同時にヒット判定を終了するように決定する。
(もっと読む)
モーションキャプチャデータの楽曲同期システムにおけるリズムマッチング並列処理装置およびそのコンピュータプログラム
【課題】モーションキャプチャデータから得られたリズム特徴量と楽曲データより得られたリズム特徴量の相関比較の計算処理時間を短縮できるようにする。
【解決手段】入力楽曲データの楽曲セグメントのビート情報と該入力楽曲データのビート特徴量と高い相関を示す動きビート特徴量をもつMoCapデータを保持する特徴量保持部2と、相関値計算の並列実行手順を登録された相関値計算並列実行手順登録部3と、相関値計算並列実行手順登録部3に登録された相関値計算の並列実行手順に従って、前記特徴量保持部2に保持された楽曲セグメントのビート情報とMoCapデータの動きビート特徴量との相関値を並列的に演算する相関値並列計算部4とを具備する。相関値並列計算部4は、楽曲セグメントのビート特徴量とMoCapデータの動きビート特徴量との相関値が高くなる相関値を並列的に求める。一例として、CUDAを用いて実現できる。
(もっと読む)
画像出力装置および3次元画像表示システム
【課題】マルチコアプロセッサを用いて複数の画像データを効率的に並列処理して出力可能にする。
【解決手段】複数の画像メモリ51〜54と、マルチコアプロセッサ21内の複数のコア31〜34とを、バス25を介して1対1に対応させる。そして、複数のコア31〜34によって画像処理された複数の画像データを、バス25を介して複数の画像メモリ51〜54に並列的に格納する。複数の画像メモリ51〜54に格納された複数の画像データは、複数の出力I/F55〜58によって並列的に出力される。すなわち、ビデオカードのGPUを用いることなく、マルチコアプロセッサ21によって直接的に画像処理された複数の画像データを、複数の画像メモリ51〜54および複数の出力I/F55〜58を介して並列的に出力する。これにより、マルチコアプロセッサ21が有するコアの数だけ並列的に画像処理を行って並列的な画像出力が可能となる。
(もっと読む)
複数のハードウェア・ドメイン、データ・タイプ、およびフォーマットの処理を統合し抽象化するフレームワーク
【課題】メディア・オブジェクトを処理するためのポータブルな開発および実行フレームワークの提供。
【解決手段】フレームワークは、メディア処理機能を実行する命令を受け入れ、メディア処理機能と関連付けるメディア・オブジェクトを受け入れ、メディア・オブジェクトのタイプおよびフォーマットを指定する属性と、メディア・オブジェクトと関連付けられたハードウェア・ドメインでメディア・オブジェクトをラップし、メディア・オブジェクト上においてメディア処理機能を実行ドメインに遂行させることを含む。メディア処理機能を実行する命令は、メディア・オブジェクトと関連付けられたハードウェア・ドメインには依存しない形態で表現され、メディア・オブジェクトのタイプおよびフォーマットにも依存しないこともできる。メディア・オブジェクトは、画像とすることができ、メディア処理機能は、GPU上で実行する画像処理機能を含むことができる。
(もっと読む)
地図表示装置及び地図表示プログラム、並びにこれを用いたナビゲーション装置
【課題】複数のプロセッサコアを効率的に使用して画像表示が完了するまでの処理時間を短縮させ、応答性に優れた地図表示装置及びナビゲーション装置を提供する。
【解決手段】情報の演算処理を行うプロセッサコアを複数有する地図表示装置であって、地図を構成する区画毎に表示範囲に含まれる割合である区画範囲割合を取得する区画範囲割合取得手段と、区画毎に地図情報を構成する区画情報を取得する区画情報取得手段と、複数のプロセッサコアを用いて区画情報を処理して表示範囲に含まれる区画毎の描画画像を生成する描画画像生成手段と、生成した区画毎の描画画像を組み合わせて生成される表示画像を表示する表示手段と、描画画像生成手段による描画画像の生成に際して、それぞれのプロセッサコアが演算処理を行う区画範囲割合の和である処理面積を均等とするように、区画情報をそれぞれのプロセッサコアに割り当てる処理面積調整手段と、を備える。
(もっと読む)
オブジェクト移動制御システム、オブジェクト移動制御方法、サーバ及びコンピュータプログラム
【課題】演算処理負荷を適切に分散することにより、高速にオブジェクトの仮想空間上での位置情報を更新することができるオブジェクト移動制御システム、オブジェクト移動制御方法、サーバ及びコンピュータプログラムを提供する。
【解決手段】クライアント制御装置2、2、・・・は、一のオブジェクトの仮想空間内の位置に関する情報及び移動に関する情報を取得し、移動した場合の一のオブジェクトが含まれる所定の仮想領域内に存在する他のオブジェクトを検出する。一の仮想領域内に存在するオブジェクト相互間の距離を算出し、距離が所定の閾値より短いオブジェクト数が所定個数より多い場合のみオブジェクトに関する情報をサーバ1へ送信する。サーバ1は、複数のオブジェクトから一対のオブジェクトを選択した一の組み合わせごとに、衝突判定処理を実行する衝突判定クライアント3を割り当てる。
(もっと読む)
可視化システム
【課題】粒子の挙動などの対象要素の状態を表す数値データを高速に可視化する。
【解決手段】並列計算装置10は、画像形成装置の現像プロセスにおけるトナー粒子Tとキャリア粒子Cの挙動を表す位置情報を、トナー粒子Tとキャリア粒子Cとで並行して算出する。可視化装置30qは、並列計算装置10によって算出されたキャリア粒子Cの位置情報を取得し、取得した位置情報が表すキャリア粒子Cの位置を画像として表示するための画像データを生成し、それと並行して可視化装置30rは、トナー粒子Tの位置情報を取得し、取得した位置情報が表すトナー粒子Tの位置を画像として表示するための画像データを生成する。端末装置40は、可視化装置30q又は30rによって生成された画像データを取得し、表示部に表示させる。
(もっと読む)
画像取扱装置、画像取扱方法および画像取扱のためのプログラム
【課題】一緒に写っている写真を利用して、人物等が誰かを類推することが可能な画像取扱装置、画像取扱方法および画像取扱のためのプログラムを提供する。
【解決手段】画像データを記録する記録部4を有し、ここに記録された画像51を指定すると、顔検出部5によって画像51の人物の顔を検出し、類似検出部11は画像51の人物の顔と類似する顔画像のある画像データの検出を行う。これによって、画像51の人物と一緒に写っている画像を検索でき、検索された画像52、53、54は、画像51と並べて表示部8に表示される。これによって画像51の人間関係を類推することができる。
(もっと読む)
3次元位置情報復元装置およびその方法
【課題】透視投影カメラモデルに基づいた擬似的でない正確な3次元位置を復元する。
【解決手段】各二次元画像から複数の特徴点を検出し各二次元画像について当該特徴点を追跡する手段と、連続する所定数の二次元画像を各特徴点毎に分配する手段と、各特徴点毎の連続する所定数の二次元画像について各特徴点毎の3次元位置Xα′とカメラの位置Πκ′を射影復元する射影復元部と、前記射影復元部により射影復元した3次元位置Xα′とカメラの位置Πκ′とを射影変換行列Hおよびカメラパラメータ行列により正しい3次元位置Xαとカメラの位置Πκとを求める自己校正部とを有する。
(もっと読む)
近傍粒子探索に用いるデータ構造の構築方法、そのプログラム、およびそのプログラムを格納した記憶媒体
【課題】GPU等上で粒子法シミュレーションの近傍粒子探索に用いるデータ構造の構築を完結させ、GPU等を効率的に利用する近傍粒子探索に用いるデータ構造の構築方法、そのプログラム、およびそのプログラムを格納した記憶媒体を提供する。
【解決手段】近傍粒子探索のデータ構造の構築方法は、GPU12等のストリーミングプロセッサで実行され、3次元デジタル画像データを2次元デジタル画像データに変換することにより物理的対象物のシミュレーションを演算する。GPUを用いる場合にはバケットテクスチャを用い、このバケットテクスチャは、物理的対象物が生じる空間に対応して作られたメモリ空間を分割するバケットによって構成される。GPUの場合では、バーテックスシェーダを用いて、バケットに格納される粒子の前記粒子番号と粒子座標を読み出し、2次元画像空間に書き込む書き込みステップを有する。
(もっと読む)
物体衝突処理方法および物体衝突処理プログラム、物体衝突処理装置
【課題】仮想物体の衝突処理の複数のプロセッサによる並列処理を効率化する。
【解決手段】並列化許否管理部210は、他のプロセッサの並列化許否管理部と協働して、部分空間の組合せごとに並列化の許否を管理する。具体的には、いずれかの仮想物体が第1および第2の部分空間の境界をまたいで存在するとき、第1の部分空間における仮想物体の衝突処理の任意のプロセッサによる実行と、第2の部分空間における仮想物体の衝突処理の他のプロセッサによる実行との並列化を禁止する。
(もっと読む)
画像表示制御装置、画像表示方法及びプログラム
【課題】オブジェクトを移動させる指示に応じて、仮想3次元空間に設定された環境情報の影響を反映した空間画像を表示させる場合に、必要な演算量を低減できる画像表示制御装置を提供する。
【解決手段】仮想3次元空間内に配置された操作対象オブジェクトを移動させる指示に応じて、所定の視点位置及び視線方向を変化させるとともに、当該仮想3次元空間の環境を示す環境情報に含まれる位置又は方向を、視点位置及び視線方向の変化に応じて変化させ、変化した環境情報を用いて仮想3次元空間内に配置された1又は複数のオブジェクトの位置又は色情報を更新し、更新されたオブジェクトを変化した視点位置及び視線方向から見た空間画像を生成し、表示装置に表示させる画像表示制御装置である。
(もっと読む)
プログラム、情報記憶媒体及び画像生成システム
【課題】効率的なヒットチェック処理を実現できるプログラム等の提供。
【解決手段】画像生成システムは第1、第2のハードウェアスレッド処理部を含む。第1のハードウェアスレッド処理部は、第1、第2のオブジェクトについての第1のヒットチェック処理を行い、第1のヒットチェック処理において第1のオブジェクトに対して第2のオブジェクトがヒットしたと判断した場合に、ヒットイベントの発生を第2のハードウェアスレッド処理部に通知する。第2のハードウェアスレッド処理部は、第1のハードウェアスレッド処理部からヒットイベントの発生が通知された場合に、第1、第2のオブジェクトのヒットチェック処理として、第1のヒットチェック処理とは異なる第2のヒットチェック処理を行う。
(もっと読む)
グラフィックスプロセッサ上の物理シミュレーション
本発明は、少なくとも1つのグラフィクスプロセッサユニット(GPU)上で物理シミュレーションを行うための、方法、コンピュータプログラム製品、およびシステムに向けられる。該方法は、以下のステップを含む。まず、少なくとも1つのメッシュに関連した物理属性を表すデータは、複数のメモリアレイに格納されることによって、シーンに描写される少なくとも1つのメッシュの運動を支配する線形方程式系を設定する。ついで、少なくとも1つのピクセルプロセッサを用いて複数のメモリアレイにおけるデータに演算が行われることによって、時刻に対する線形方程式系を解く。ここで、時刻に対する線形方程式系に対する解を表す変更されたデータは、複数のデータメモリに格納される。 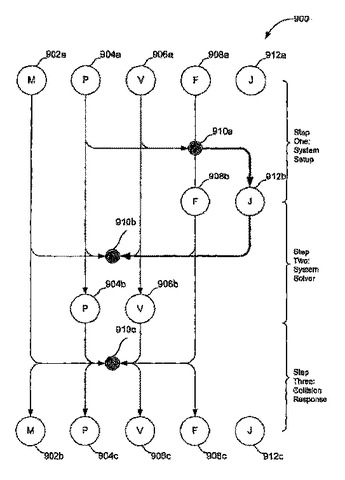 (もっと読む)
(もっと読む)
情報処理システム、情報処理方法、情報処理装置、携帯端末装置、情報処理プログラム及び情報処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体
【課題】ユーザの違和感を低減可能な情報処理技術を提供する。
【解決手段】特定手段K2は、入力手段K1に入力された指示信号に基づき、オブジェクトの動作を表す動作データを特定する。無線通信手段K3は、特定手段K2が特定した動作データを送信する。音出力手段K4は、特定手段K2が特定した動作データに対応する音声を出力する。音入力手段K10には、音出力手段K4が出力した音声が入力される。解析手段K12は、音入力手段K6に入力された音声を解析し、オブジェクトの仮動作を表す仮動作データを特定する。無線通信手段K11は、無線通信手段K3が送信した動作データを受信する。描画手段K13は、無線通信手段K3から動作データが供給されると、当該動作データが表す動作に応じたオブジェクトを描画し、解析手段K12から仮動作データが供給されると、当該仮動作データが表す仮動作に応じたオブジェクトを描画する。
(もっと読む)
1 - 20 / 32
[ Back to top ]