
Fターム[5B057BA13]の内容
Fターム[5B057BA13]に分類される特許
1 - 20 / 204
撮像システム
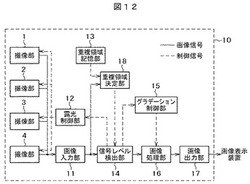
【課題】複数のカメラからの画像を連結し一巡して表示する場合、全ての連結部において画像の切れ目を目立たなく表示する。
【解決手段】画像処理部16は、複数の撮像部1〜4からの画像信号を合成して合成画像を生成するとともに、画像内の信号レベルにグラデーション処理を行なう。信号レベル検出部14は、複数の撮像部からの画像信号のうち互いに重複する領域における信号レベルを検出する。グラデーション制御部15は、各撮像画像の重複領域における信号レベルを所定のレベル差以下となるよう画像処理部16に対してグラデーション処理量を設定する。
(もっと読む)
撮像装置、撮像方法、部品実装装置および印刷装置

【課題】撮像対象物のサイズに影響されることなく、高分解能で撮像対象物を撮像する。
【解決手段】複数のラインカメラモジュール110を備え、複数のラインカメラモジュール110の各々は、ラインセンサ121を含むラインカメラ120と、ラインセンサ121の長手方向に対して交差する方向であって、かつラインカメラ120の側方に配置され、ラインカメラ120の撮像領域に光を投影する照明装置130とを有し、隣接するラインカメラモジュール110との間でラインセンサ121の撮像領域が長手方向に連続するよう、ラインセンサ121の長手方向に対して交差する方向において、隣接するラインカメラモジュール110と重なり合いを有するように配置されている。
(もっと読む)
画像処理装置及び画像処理方法
【課題】ラインセンサの読み取り時に発生する位置ずれを主走査及び副走査のどちらの方向に対しても補正する画像処理装置及び画像処理方法を提供すること。
【解決手段】実施形態の画像処理装置は、カラー用の複数のラインセンサから構成されるラインセンサ部と、前記複数のラインセンサで読み取られたカラー信号毎に画素単位で保存する画像メモリ部と、前記画像メモリ部に保存されるカラー信号毎の画素を用いて、画像処理対象とする注目画素とその周辺画素を含む画素配列を画像処理単位として生成する画素配列生成部と、前記画素配列から基準色となる基準画素配列を生成する基準色算出部と、基準画素配列を構成する画素の画素値と前記画素配列を構成する画素の画素値から前記カラー信号毎の回帰直線を算出する回帰直線算出部と、前記回帰直線を用いて前記注目画素の画素値を補正した補正画素配列を前記カラー信号毎に生成する色ずれ補正部と、前記補正画素配列と前記画素配列とを所定の混合率で混合する補正信号混合部と、を有する。
(もっと読む)
目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイス
【課題】目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイスを提供する。
【解決手段】目視される物体202の表面210の画像500を獲得して、表示するステップであって、画像500の複数のピクセル231、232、233、234は、目視される物体202上の複数の表面ポイント221、222、223、224に対応する、ステップと、複数の表面ポイントに対応する複数のピクセルの各ピクセルに関して、ピクセルに対応する表面ポイントに関する3次元座標が利用可能性であるかどうかを判定するステップと、ピクセル231に対応する表面ポイント221に関する3次元座標が利用可能でない各ピクセル231に関する第1のオーバーレイ250を表示するステップとを備える方法。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】3D画像の最適な構図を検出することができるようにする。
【解決手段】最適視点検出部は、3以上の視点の画像と前記3以上の視点の視差画像を用いて、前記3以上の視点のうちの所定の2視点を最適な視点として検出する。本技術は、例えば、3D画像を撮影する撮影装置に適用することができる。
(もっと読む)
画像色彩補正装置及び画像色彩補正方法
【課題】光源によらない一定の色に補正できる画像色彩補正装置を提供する。
【解決手段】本発明における画像色彩補正装置1は、測定対象物2と複数のカラーコード付き標識CTを同時に又は別時に異なる複数方向から撮影する撮影部3と、撮影部3により撮影されたカラーコード付き標識CTの撮影画像から、位置検出用パターンP1の位置を求める位置検出部51と、撮影画像から基準色パターンP2を抽出する基準色パターン抽出部52と、撮影画像からカラーコードパターンP3を抽出するカラーコードパターン抽出部53と、基準色パターン抽出部で抽出された基準色パターンのうち、少なくとも光源色補正に用いる色彩を用いて、撮影画像の光源色補正を行う色補正部71とを備える。
(もっと読む)
撮像装置
【課題】 装置本体の表面から撮像を行って取得した撮像画像データとその背面から撮像を行って取得した撮像画像データの一部分の画像データとを合成しても、不自然な印象を与えることのない合成画像データを取得すること。
【解決手段】 装置本体の正面に設けられ、第1の主要被写体を撮像して第1の撮像画像データを取得する第1の撮像部と、装置本体の背面に設けられ、第2の主要被写体を撮像して視差を有する少なくとも2つの視差画像データを含む第2の撮像画像データを取得する第2の撮像部と、第2の撮像部の撮像により取得された2つの視差画像データから第2の主要被写体の画像データを切り出す切出部と、第1の撮像画像データと切出部により切り出された第2の主要被写体の画像データとを予め設定された合成条件に従って合成して合成画像データを作成する画像処理制御部とを備える。
(もっと読む)
画像処理装置、方法、プログラムおよび記録媒体
【課題】測距精度に影響する視差方向のパラメータのキャリブレーション精度を高め、ステレオカメラの測距精度を向上させる画像処理装置、方法、プログラムおよび記録媒体を提供すること。
【解決手段】本発明の画像処理装置は、ステレオカメラが撮影した撮影画像対を取得し、変換情報を使用して撮影画像対を平行化して、その対応点を探索する。そして、当該対応点を使用して撮影画像対の視差値を算出し、変換情報の較正が必要と判断した場合に、ステレオカメラを構成するカメラの回転ずれを考慮した変換情報に較正する。
(もっと読む)
車両周辺監視システム
【課題】車載の撮像装置を通じて得られた画像において人間等の対象物体が背景に紛れ込んだ場合でも、この対象物体の存在を高精度で認識しうる車両周辺監視システムを提供する。
【解決手段】本発明の車両周辺監視システム10によれば、第1処理部11によって赤外線カメラ102を通じて得られた2値化画像における高輝度領域の輪郭Cが認識され、当該輪郭Cのうち対象物体Pの形状に応じた1次要件を満たす部分が1次輪郭部分C1として認識される。また、第2処理部により、1次輪郭部分C1の実空間位置が測定され、当該測定位置が対象物体Pのサイズに応じた2次要件を満たすか否かに応じて、1次輪郭部分C1が対象物体Pの輪郭部分である2次輪郭部分C2に該当するか否かが判定される。
(もっと読む)
物体検出装置及びこれを備えた車載機器制御装置
【課題】互いに異なる波長帯の光を発する少なくとも2種類の検出対象物を検出する際に外乱光が存在しても、高精度な検出を可能とする。
【解決手段】撮像装置が撮像した画像データから、対向車両のヘッドランプと先行車両のテールランプがそれぞれ発する各検出波長帯(赤色と白色)についての分光情報を取得するとともに、同画像データから当該分光情報に対応した検出波長帯についての偏光情報を取得し、取得した分光情報によりヘッドランプとテールランプを識別し、偏光情報を用いてヘッドランプ及びテールランプからの直接光と雨路面からの照り返し光とを識別する。
(もっと読む)
画像処理装置および距離計測装置
【課題】撮影シーンに応じた立体表示を実現することが可能な技術を提供する。
【解決手段】画像処理装置は、撮影領域における被写体までの距離計測を、撮影領域に設定された予備計測位置において行って、距離情報を取得する第1距離計測部12と、第1距離計測部12で取得された距離情報に基づいて、撮影領域における被写体までの距離計測を追加して行うための本計測位置を撮影領域において設定する設定手段と、本計測位置において距離計測を行って、距離情報を取得する第2距離計測部13と、第1距離計測部12および第2距離計測部13で取得された距離情報に基づいて、視差情報を生成する視差情報生成部15と、視差情報に基づいて立体画像を生成する立体画像生成部16とを備える。
(もっと読む)
カラー画像データ生成装置及びこれを備えた外観検査装置
【課題】搬送される撮像対象物を3ライン方式のカメラにより複数方向から撮像してカラー画像データを生成するカラー画像データ生成装置を提供する。
【解決手段】各ラインセンサ111,112,113の並設間隔をP、搬送面に沿って搬送される撮像対象物Wを上方向から撮像したときの分解能をa、撮像対象物Wを側面方向から撮像したときの分解能をbとすると、搬送面内における側面方向Lと搬送方向Kとの間の角度θがP=s×a及びP=t×bの関係を満たす角度であり且つθ=sin−1(s/t)となる角度に側面方向Lが設定される。RGBの各成分の画像データの内、上方向についてはn番目,n+s番目及びn+2s番目の画像データに含まれる上面画像、側面方向についてはm番目,m+t番目及びm+2t番目の画像データに含まれる側面画像がそれぞれ合成されてカラー画像データが生成される(s,t,n,mは1以上の整数)。
(もっと読む)
路面画像生成車両、路面画像生成装置、及び、路面画像生成方法
【課題】車両を曲線に沿って走行させた場合に、曲線に沿った路面の画像を生成することができる技術を提供する。
【解決手段】繰り返し路面を撮影する路面撮影手段と、第1視野範囲62内の路面を撮影する第1ラインカメラ14と、第1視野範囲と交差する第2視野範囲60内の路面を撮影する第2ラインカメラ16と、第1タイミングで第1ラインカメラと第2ラインカメラで路面を撮影し、第2タイミングで第1ラインカメラと第2ラインカメラで路面を撮影し、第1タイミングの第1ラインカメラの撮影画像と第2タイミングの第2ラインカメラの撮影画像との一致点を特定し、第1タイミングの第2ラインカメラの撮影画像と第2タイミングの第1ラインカメラの撮影画像との一致点を特定し、第1の一致点と第2の一致点に基づいて路面撮影手段で撮影された画像を配列する手段を有する路面画像生成車両10。
(もっと読む)
半導体集積回路及び全周囲映像システム
【課題】複数台のカメラでの撮影による画像データを半導体メモリへ格納する場合のバス負荷を軽減する。
【解決手段】半導体集積回路(10)は、複数のカメラ(31〜34)と半導体メモリ(35)とが接続可能に構成される。この半導体集積回路は、複数の第1インタフェース(11〜14)と、第2インタフェース(21)と、バス(22)と、複数の画像処理モジュール(15〜18)を含む。そして上記画像処理モジュールは、予め指定された領域内の画像データについて歪み補正を行い、その歪み補正後の上記領域内の画像データを、上記バス及び上記第2インタフェースを介して上記半導体メモリに書き込む処理を含む。予め指定された領域以外の画像データを、上記画像処理モジュールでの歪み補正対象から外すことにより、半導体メモリに転送される画像データの量を削減する。
(もっと読む)
三次元形状測定装置、三次元形状測定方法及びコンピュータプログラム
【課題】少ない投影パターン数で、形状変化が急激な計測対象や不連続な計測対象の高精度な形状計測を可能とする。
【解決手段】三次元形状計測装置は、明るさ変化を有するパターンを計測空間に投影するパターン投影手段と、パターンが投影された計測空間を撮影する撮像手段とを備え、計測空間に存在する計測対象の三次元形状を計測する三次元形状計測装置であって、撮影手段により得られた撮影画像のパターンの明るさ変化からパターンの局所的な配置情報を算出する局所配置情報算出手段と、撮影画像におけるパターンのボケ量を算出するボケ量算出手段と、局所配置情報とボケ量とに基づき、計測対象の三次元形状を算出する三次元形状算出手段とをさらに備える。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】入力デジタル画像データに対するWCSを利用したカラーマッチング処理において、データ処理速度向上を実現する。
【解決手段】WCS処理によりカラーマッチングする画像処理装置は、入力デバイスの色空間情報、入力デバイスの観察条件情報、及び色変換アルゴリズム情報を取得し、取得した情報を用いてカラーマッチングを行うための色変換テーブルを作成する色変換テーブル作成手段と、入力デバイスに接続された出力デバイスの階調性を補正し濃度安定化制御を実行する濃度安定化制御手段と、色変換テーブル作成手段、及び濃度安定化制御手段による処理を並行して実行し、色変換テーブル作成手段により作成された色変換テーブルを用いて、カラーマッチングを実行するカラーマッチング手段を有し、濃度安定化制御手段により濃度安定化制御された出力デバイスへカラーマッチング手段にて処理された結果を送信することを特徴とする。
(もっと読む)
画像処理装置、画像表示システム及び画像表示方法
【課題】画角が狭い画像を取得するための専用のカメラがなくても、合成画像と画角が狭い画像とのいずれも生成する。
【解決手段】画像表示システムの画像処理回路3においては、画像合成部32が、複数の撮影画像P1〜P4に基づいて、仮想視点からみた車両9の周辺の領域を示す合成画像CPを生成する。一方で、歪補正部33が、複数の撮影画像P1〜P4のうちの一の撮影画像P4の一部の領域の歪みを補正して、一の撮影画像P4より画角が狭い歪補正画像RPを生成する。このため、画角が狭い画像を取得するための専用のカメラがなくても、合成画像と画角が狭い歪補正画像とのいずれも生成することができる。
(もっと読む)
画像処理装置、及び、画像処理プログラム
【課題】より正確に紙指紋情報を登録する画像処理装置等を提供することを目的とする。
【解決手段】画像処理装置であって、媒体の表面を光学的に読み取る画像読み取り手段と、前記画像読み取り手段によって読み取られた画像に基づいて、前記画像中のノイズの位置に関する情報であるノイズ位置情報を取得するノイズ位置情報取得手段と、前記画像から前記ノイズの除去処理をしたノイズ除去処理後画像を生成する画像生成手段と、前記ノイズ除去処理後画像から紙指紋情報を取得する手段と、前記ノイズ除去処理後画像中の前記ノイズ位置情報に基づいて設定する領域から、前記紙指紋情報を登録する紙指紋情報登録手段と、を有する。
(もっと読む)
画像表示システム、画像生成装置、及び、画像表示方法
【課題】周辺画像に表示内容を切り替える場合において、切り替え後に表示された周辺画像がどの視点からみた周辺画像であるかをユーザが直感的に把握できる技術を提供する。
【解決手段】画像表示システム120においては、ディスプレイの表示内容を周辺画像に切り替える場合に、複数の合成画像を時間的に連続して表示して、所定の基準視点VP0から移動先の視点VP1まで仮想視点VPの位置が段階的に移動するアニメーション表現がなされる。このため、切り替え後にディスプレイ21に表示された周辺画像がどの視点からみた周辺画像であるかをユーザが直感的に把握することができる。
(もっと読む)
行動監視システム、行動監視プログラム、及び行動監視方法
【課題】監視対象が多数の場合であっても、監視対象の識別及び行動把握を容易に行うことができる行動監視システム、行動監視プログラム、及び行動監視方法を提供すること。
【解決手段】監視対象Tの光学像が入力される撮像部、監視対象Tと背景とを分離して監視対象Tの各特徴量を算出する特徴量算出部、特徴量から監視対象Tの各移動軌跡を算出する移動軌跡算出部、監視対象Tの所定部位の3次元位置座標を算出する位置座標算出部、所定部位の3次元位置座標に基づき、所定部位の移動速度及び移動方向を算出、所定部位の各動作軌跡を算出する動作軌跡算出部、特徴量及び3次元位置座標がステレオカメラ4間で類似する移動軌跡を繋げて、監視対象T毎の統合移動軌跡を生成する移動軌跡統合部、特徴量及び3次元位置座標がステレオカメラ4間で類似する動作軌跡に対して、監視対象T毎の統合動作軌跡を生成する動作軌跡統合部、を備えている。
(もっと読む)
1 - 20 / 204
[ Back to top ]