
Fターム[5B057CE10]の内容
画像処理 (340,757) | 処理部 画像基本処理 (31,097) | 接合 (621)
Fターム[5B057CE10]に分類される特許
141 - 160 / 621
画像合成装置及び方法
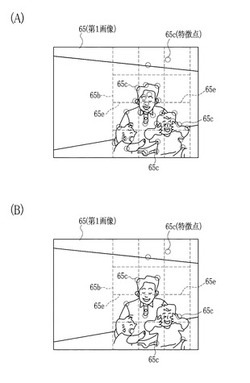
【課題】特徴点の分布を均一にして画像の合成精度を向上させる。
【解決手段】第1画像65の重複画像領域65b内から、特徴のある信号勾配を持つ複数の特徴点65cを抽出する。特徴65cが抽出された重複画像領域65bを、縦m×横n個の複数の分割領域65eに分割する。各分割領域65e内の特徴点65cの個数が均一になるように、各分割領域65eから特徴点65cをランダムに削除する。削除後に重複画像領域65b内に残った、分布が均一な特徴点65cを用いて画像合成を行う。
(もっと読む)
画像処理装置

【構成】車両100に設けられたカメラCM_0〜CM_3は、共通視野CVW_0〜CVW_3を部分的に有する姿勢で路面を斜めから捉える。CPUは、このようなカメラCM_0〜CM_3から出力された被写界像P_0〜P_3を、路面を上方から眺めた状態を表す鳥瞰画像BEV_0〜BEV_3に変換する。CPUはまた、共通視野CVW_0〜CVW_3に存在する立体物を表す画像の位置を、鳥瞰画像BEV_0〜BEV_3の各々から排除位置として検出し、排除位置の画像を鳥瞰画像BEV_0〜BEV_3から共通的に排除する。CPUはさらに、排除処理の後に残った複数の画像間の輝度および/または色度の相違が抑制される態様で、鳥瞰画像BEV_0〜BEV_3を合成する。
【効果】合成された鳥瞰画像の品質を向上させることができる。
(もっと読む)
集積回路の発光画像を生成するための方法、システム、およびプログラム
【課題】デバイス画像を生成するための方法、システムおよびコンピュータ・プログラムを開示する。
【解決手段】方法は、デバイスの第一および第二画像を撮像するステップであって、該第一および第二画像はオーバーラップする部分を有する、撮像するステップと、オーバーラップする部分を予測して、第一および第二画像を近似的に整列するためのおおよそのシフト量を得るステップと、を含む。方法は、定義された相互相関アルゴリズムを使ってオーバーラップする部分を解析し、第一および第二画像を整列するための厳密なシフト量を計算するステップと、厳密なシフト量を使って第一および第二画像を一緒に結合するステップと、をさらに含む。一つの実施形態において、光学システムを使って画像が撮像され、第一および第二画像を撮像するために、ステージを使ってデバイスまたは光学システムのいずれかが移動され、予測するステップは、ステージの移動量を用いてオーバーラップする部分を予測するステップを含む。
(もっと読む)
デジタル画像減算
少なくとも2つの入力画像のデジタル減算画像を生成するシステムが提案される。このシステムは、位置合わせパラメータ6の異なる値に基づき、上記入力画像7、8の複数の異なる位置合わせを生成する位置合わせサブシステム1を有する。このシステム更に、上記複数の位置合わせの個別の1つに基づき上記入力画像を減算することにより、複数の減算画像を生成する減算サブシステム2を有する。このシステム更に、上記複数の減算画像を結合された減算画像9へと結合する結合サブシステム3を有する。位置合わせパラメータ6は、上記入力画像7、8において見える対象物の設定された深度を表す。上記結合サブシステム3が、上記複数の減算画像における対応するピクセル位置の又はこの位置の周りの画素値に基づき、上記結合された減算画像のピクセル位置に対して結合された画素値を割り当てるよう構成される。  (もっと読む)
(もっと読む)
画像処理装置、画像処理方法
【課題】 露出が異なる画像同士をより正確に位置合わせしてから合成するための技術を提供すること。
【解決手段】 互いに異なる露光時間で撮像された複数の画像を露光時間順に一列に並べた場合に、この一列において隣接する2つの画像毎のセットを設定する(S202)。着目セットに含まれる長画像と短画像とで共通の領域を、それぞれの画像の画素値の分布に基づいて特定する(S203,S204)。長画像と短画像とを重ね合わせた場合に、それぞれの共通領域が一致するように、長画像に対する位置ずれ補正量を求める(S206)。位置ずれ補正量に基づいて長画像に対して画像処理を行う(S208)。それぞれのセットについて画像処理を行うことで得られる複数の画像を合成することで合成画像を生成し、生成した合成画像を出力する(S209)。
(もっと読む)
モザイク画像生成方法、装置及びプログラム
【課題】
高解像度航空写真から地上のモザイク画像を形成する際の処理負担を軽減し、ミスを低減する。
【解決手段】
高解像度航空写真データ24の解像度を落とした低解像度航空写真データ26を用意する。前処理では、低解像度航空写真データ26に対し、機能38、42、44により、オルソ画像の生成、接合線探索及びモザイク合成を実行し、低解像度モザイク画像を生成する。色調補正係数決定機能46は、低解像度モザイ画像から各モザイク片の色調補正係数を決定する。本処理では、正射変換機能38が、高解像度航空写真データ24の、接合線探索で探索された暫定接合線に従う合成候補域から高解像度オルソ画像を生成する。色調補正機能48が、色調補正係数に従い高解像度オルソ画像の色調を補正する。接合線探索機能42及びモザイク合成機能44が、高解像度オルソ画像から高解像度モザイク画像を生成する。
(もっと読む)
周辺表示装置
【課題】自走可能な移動体周辺の俯瞰画像の表示において、任意の視点位置から見た俯瞰画像を簡便に取得できる周辺表示装置を提供する。
【解決手段】視点位置変更手段70からの仮想カメラの視点位置の情報に従って、仮想カメラの姿勢を決定する仮想カメラ姿勢決定部8と、運転状況データ出力手段200からの運転状況データを受け、自車両の運転状況を把握して、自車両の運転状態などの運転状況データを出力する運転状況把握部3と、自車両周辺の環境状況の把握を行い、環境状況データを出力する環境状況把握部4と、路面上の障害物の有無を判定して障害物データを出力する障害物判定部9と、運転状況把握部3、環境状況把握部4および障害物判定部9の出力、記憶部7に格納された注視点位置情報を受け、仮想カメラの注視点位置情報を変更する注視点位置情報変更部10を備えている。
(もっと読む)
顕微鏡システム、標本観察方法およびプログラム
【課題】標本内の所望の構造物を視認性良く表した画像をユーザに提示し、診断精度を向上させること。
【解決手段】本発明のある実施の形態において、高解像画像取得処理部453は、顕微鏡装置2に対する動作指示を行い、複数の染色色素によって多重染色された標本Sを載置した電動ステージ21をXY平面内で移動させながら、標本領域を部分毎に撮像した複数の標本領域区画画像を取得する。そして、高解像画像取得処理部453は、各標本領域区画画像を繋ぎ合せてVS画像を生成する。構造物抽出部455は、VS画像からユーザが指定した抽出対象構造物の領域を抽出する。表示画像生成部456は、VS画像中に映る対象標本S内の抽出対象構造物をユーザが指定した表示方法で表した表示画像を生成する。そして、VS画像表示処理部454は、生成した表示画像を表示部43に表示する処理を行う。
(もっと読む)
車載用画像表示装置および画像のトリミング方法
【課題】合成された画像上で後方車両を見易く表示することができる車載用画像表示装置を提供する。
【解決手段】車載用画像表示装置は、自車の車幅方向の中央部から自車の後方を撮像する撮像カメラ102と、自車のサイドミラーに設置され自車の後方を撮像する撮像カメラ104、106と、撮像カメラ102〜106で撮像された画像データを合成して後方画像を生成する出力制御部116と、後方画像を表示するディスプレイ118と、自車の後方車両を検出するセンサー112とを有する。出力制御部116は、検出された後方車両の位置に応じて画像データが合成される境界を可変する。
(もっと読む)
車両周辺画像提供装置
【課題】カメラ画像の重複領域の範囲で障害物が検出された場合でもその障害物を正確に表示することが可能な「車両周辺画像提供装置」を提供すること。
【解決手段】車両周辺画像提供装置は、表示手段と、車両周辺の画像を取得可能に設置された複数のカメラと、車両の画像のデータを予め格納すると共に、撮像手段により取得された画像のデータを逐次格納する記憶手段と、記憶手段に格納されているデータから車両の画像と車両周辺の画像を合成して表示手段の画面に表示させるように制御する制御手段と、を備える。制御手段は、各画像のうち隣接する2つの画像の重複領域の範囲に障害物を検出したとき、各カメラのオートホワイトバランスの設定位置を重複領域に指定して各画像を取得する。
(もっと読む)
画像処理装置
【課題】動画像において移動する移動体の全体像を容易に把握することが可能な技術を提供することを目的とする。
【解決手段】画像処理装置1は、通信部21と、断片静止画像抽出部24aと、画像合成部24bとを備える。通信部21は、動画像の入力を受け付ける。断片静止画像抽出部24aは、動画像から、当該動画像において移動する移動体の断片像のみを示す、時系列順に序列付けられた複数の断片静止画像を抽出する。画像合成部24bは、複数の断片静止画像を合成して、移動体の全体像を示す合成静止画像を生成する。
(もっと読む)
スキャン機能を備えた画像形成装置及びこのスキャン方法
【課題】平板ガラスより大きい原稿サイズスキャン機能を備えた画像形成装置及びこのスキャン方法を提供すること。
【解決手段】本発明による画像形成装置は原稿を移送させるための移送ローラーを動作させる移送ローラーモーター駆動部と、平板ガラスに密着された第2原稿サイズの第1領域で第1原稿サイズの幅より広くスキャンして第1画像データを出力し、移送ローラーによって移送され、平板ガラスに密着された第2原稿サイズの第2領域で第1原稿サイズの幅より広くスキャンして第2画像データを出力するスキャニング部と、第1画像データと第2画像データから選定されたオーバレイ領域を利用して画像パターンのマッチングを行い、オーバレイ領域の画像を重畳して第2原稿サイズの画像を生成する画像合成部とを含むことによって、A4サイズの長さよりやや広いスキャンセンサーでA3サイズの原稿をスキャンすることができ、高い品質の合成されたA3原稿画像を得ることができる。
(もっと読む)
画像接合方法、装置及びプログラム
【課題】 2つのオルソ画像をより自然に接合する。
【解決手段】
近似度算出プログラム(12a)が、ハードディスク装置(24)に格納される2つのオルソ画像データ(30)の重複部分の探索範囲で近似度を算出する。近似度2値化プログラム(12b)が、探索範囲内の近似度を最大の閾値で2値化し、ラベリング処理プログラム(12c)がラベル化し、細線化プログラム(12d)が細線化する。無指定探索線探索プログラム(12e)又は入口点指定接合線探索プログラム(12f)が、接合線決定基準線に沿った方向で近いラベルを探索しながら、探索したラベル内に接合線を設定する。ジャンプ区間に対しては、近似値の閾値を下げて、2値化、ラベリング処理および細線化を実行し、接合線決定基準線に沿った方向で近いラベルを探索しながら、探索したラベル内に接合線を設定することを繰り返す。
(もっと読む)
画像処理装置、撮像装置
【課題】特徴点が抽出しづらい画像間であっても良好に合成を行うことが可能な撮像装置を提供する。
【解決手段】それぞれ異なる方向を撮像する6個の撮像ユニット1〜6を有する撮像装置100であって、撮像ユニット1〜6は、それぞれ、その撮像範囲が、隣り合う撮像ユニットの撮像範囲の一部と重なるように画角が設定されており、隣り合う2つの撮像ユニットでの撮像により得られる2つの画像データを画像データ組とし、各画像データ組から特徴点を抽出するデジタル信号処理部17と、画像データ組から抽出された特徴点の情報に基づいて、該画像データ組の2つの画像データのオーバーラップ部分を重ね合わせて2つの画像データを合成する画像合成部19とを備え、画像合成部19は、特徴点が抽出されなかった画像データ組については、デジタル信号処理部17で抽出された別の画像データ組の特徴点の情報に基づいて合成を行う。
(もっと読む)
撮像装置
【課題】複数の静止画像を撮影する際において、望ましい撮影範囲の設定を支援する。
【解決手段】1回目のシャッタボタン押下によって1枚目の静止画像を撮影した後、2枚目の静止画像の撮影を指示する2回目のシャッタボタン押下を待機している期間中、最新のプレビュー画像212と1枚目の静止画像に基づく画像211をブレンディング合成することで得た画像を、表示用画像213として生成及び表示する。画像211は、例えば、1枚目の静止画像から抽出した顔領域内の画像である。ユーザは、画像211及びプレビュー画像212内における同一の被写体が表示画面上で重なるようにカメラ操作を行い、2回目のシャッタボタン押下を行うことで、撮影範囲が互いに一致した第1及び第2の静止画像を得ることができる。
(もっと読む)
映像処理システム、撮影装置及び映像処理方法
【課題】 撮影装置から送信されるデータ量の削減と、高品質な生成映像の生成とを両立する映像処理システムを提供する。
【解決手段】 複数の撮影部110〜140は、生成映像データを生成するための映像データを撮影するカメラ111、121、131、141と、映像データの分割した複数の領域を識別する領域情報と、生成映像データの生成の際に映像データの各領域に要求される解像度に基づいて各領域ごとに算出された重要度とを記憶した部分重要度パターン記憶部115、125、135、145と、重要度を参照して、撮影された映像データの各領域を重要度に応じた圧縮率で圧縮する送信映像圧縮部112、122、132、142と、圧縮された映像データを車内伝送路経由で映像処理装置200に送信するネットワークI/F部113,123,133,143とを備えている。
(もっと読む)
操縦支援装置
【構成】カメラC_1〜C_4は、路面を移動する車両に設けられて、路面を斜め上から捉える。CPU12pは、カメラC_1〜C_4から繰り返し出力される被写界像P_1〜P_4に基づいて、路面に対する全周鳥瞰画像を繰り返し作成する。作成された全集鳥瞰画像は、表示装置16のモニタ画面に再現される。CPU12pは、車両の移動方向に直交する方向の側部に建築物のような立体物が存在するか否かを、上述の要領で作成された全周鳥瞰画像に基づいて判別する。CPU12pはまた、判別処理のために注目される側部に相当する部分画像がモニタ画面に再現される全周鳥瞰画像に占める割合を、判別結果に基づいて調整する。
【効果】操縦支援性能が向上する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】パノラマ撮影で撮影された画像ファイルを記録する際、画像ファイル内には複数枚の画像データが記録されている為、ファイルサイズが大きくなる問題がある。また、JPEG等でさらに高圧縮な処理を施すことによりファイルサイズを小さくすることは可能であるが、画像劣化が顕著に現れてしまう問題がある。
【解決手段】入力された画像ファイルに関してパノラマ撮影されたものか否かを判定し、記録時には一方のオーバーラップ領域を削除し、もう一方のオーバーラップ領域の位置情報を付加する。その後、送信または印刷時には付加された位置情報を元に、オーバーラップ領域を復元する。このようにして、画像劣化させずに記録時のファイルサイズを低減する。
(もっと読む)
画像処理装置
【課題】 破断部付近の画像や形状にかかわらず、各原稿破片の画像データをつなぎ合わせて、合成画像データを出力可能な画像処理装置を提供する。
【解決手段】 画像処理装置に、複数の原稿破片の画像を読み取って、それぞれの画像データを入力する画像データ入力部と、入力された各画像データから、それぞれの原稿破片の形状を示す特徴量を抽出する特徴量抽出部と、抽出された各特徴量に基づき、各画像データを位置合わせするための位置合わせパラメータを算出する算出部と、算出された位置合わせパラメータに基づいて、各画像データを合成し、合成画像データを出力する合成出力部とを設ける。
(もっと読む)
電子カメラ
【構成】撮像装置18は、被写界を捉える撮像面を有して被写界像を出力する。CPU30は、被写界に存在する物体上の複数の位置までの距離を撮像装置18から出力された被写界像に基づいて検出する。CPU30はまた、この物体に対する撮像面の傾きを上述の要領で検出された距離に基づいて算出し、算出された傾きを参照した座標変換処理を撮像装置18から出力された被写界像を形成する複数の画素に対して実行する。
【効果】簡便な処理で、物体を正面から捉えたように被写界像を補正することができる。
(もっと読む)
141 - 160 / 621
[ Back to top ]