
Fターム[5B057CE12]の内容
画像処理 (340,757) | 処理部 画像基本処理 (31,097) | 濃淡(階調)処理 (5,694) | 2値化 (1,709)
Fターム[5B057CE12]の下位に属するFターム
擬似中間調処理 (927)
Fターム[5B057CE12]に分類される特許
161 - 180 / 782
輪郭線抽出装置およびその方法、並びに画像検査装置
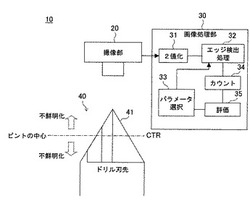
【課題】様々な形状のものに対応可能で、かつノイズの影響を極力排除することが可能で、精度の高い輪郭線抽出が可能な輪郭線抽出装置およびその方法、並びに画像検査装置を提供する。
【解決手段】輪郭線抽出装置30は、画像を2値化する2値化回路31と、2値化画像から輪郭線を検出するエッジ検出機能と、輪郭線検出関数のパラメータを変更可能してエッジを検出する可変エッジ検出機能を有するエッジ検出処理部32と、輪郭線検出関数の固定または可変のパラメータをエッジ検出処理部に供給するパラメータ選択部33と、分割された領域毎に輪郭線を分割して画素数をカウントするカウント部34と、輪郭線を領域毎にカウントした結果で領域別のエッジ検出精度を評価する評価部35を有する。
(もっと読む)
表面疵検査装置

【課題】 鋼板のゴールドダスト疵を、長時間安定して精度よく検査することができる表面疵検査装置を提供する。
【解決手段】 鋼板21のゴールドダスト疵を検査する表面疵検査装置10は、ハロゲンランプ11と、CCDカメラ12と、二値化処理手段15と、ブロブ処理手段16と、判定手段17と、を含む。ハロゲンランプは、鋼板の表面に対して傾斜して光を照射する。CCDカメラは、ハロゲンランプと同じ傾斜側に配置され、鋼板の表面を撮像して画像信号を得る。二値化処理手段は、画像信号を二値化する。ブロブ処理手段は、二値化後の画像信号からブロブ処理結果を求める。判定手段は、鋼板のゴールドダスト疵に関する品質とブロブ処理結果との関係として予め求められる検量線に、ブロブ処理手段で求められるブロブ処理結果を対比して、鋼板のゴールドダスト疵に関する品質を判定する。
(もっと読む)
ノイズ成分除去装置、ノイズ成分除去プログラムを記録した媒体
【課題】 グラデーションのような画像領域が含まれている場合に、適切な閾値を設定することができなかった。
【解決手段】 矩形領域の検出(S1)では、画像データの中で文字や絵柄が含まれる矩形領域を設定する。矩形領域の特徴値検出(S2)では、各矩形領域のヒストグラムから歪度、尖度、最頻値、中央値、平均値を求める。ヒストグラムの形状判定(S3)では、特徴値をもとにヒストグラムの形状を判定する。矩形領域の閾値設定(S4)では、判定されたヒストグラムの形状に対応した手法で閾値を算出する。二値化(S5)では、設定された閾値を用いて画像を二値化する。本発明は、入力画像の文字や絵柄を矩形領域として検出し、検出した矩形領域内のヒストグラムの形状を五つの類型に判別し、それぞれのヒストグラムの形状に対応した手法で適切な閾値を設定する。
(もっと読む)
画像処理装置、情報処理装置、画像読取装置およびプログラム
【課題】連結成分が外接する図形である外接図形が複数重なった場合であっても、いずれかの外接図形内の連結成分に対応する画像が見えなくならないようにする。
【解決手段】処理選択手段114は、動作状態指定手段115による動作状態の指定に応じて、変換手段116、並べ替え手段117、又は、統合手段118のいずれかを、重畳外接矩形抽出手段113によって抽出された2以上の外接矩形に対して処理を行う手段として選択する。変換手段116は抽出された外接矩形の各々に含まれる画素のうち連結成分ではない画素を透過を意味する画素に変換する処理を行う。並べ替え手段117は抽出された外接矩形のうち一方の外接矩形の領域と他方の外接矩形内の連結成分とが前面から見たときに重なり合わないようにこれらを重ねる処理を行う。統合手段118は抽出された外接矩形と、これらに外接する図形である外接矩形にそれぞれ対応する画像データを記憶する。
(もっと読む)
視認支援評価装置及びプログラム
【課題】視認支援によるドライバの視認性を客観的に評価する。
【解決手段】視認支援評価装置は、視認支援によって照明された仮想環境を2次元で描画するための2次元環境データを生成する2次元環境データ生成部2と、生成された2次元環境データに対して、ドライバの視認特性に応じた画像処理を行う画像処理部4と、画像処理された2次元環境データの画像全体と、当該画像全体のうちの対象部分の画像と、のそれぞれの特徴量に基づいて、対象部分の視認性を評価する視認性評価部5と、を備えている。
(もっと読む)
画像処理装置及びコンピュータプログラム
【課題】矩形候補が複数存在する場合であってもユーザが所望の矩形候補を快適に選択することを可能にする。
【解決手段】画像処理部47が、複数の矩形候補Sを四角形領域の重心座標と大きさに基づいてグループ分けし、複数の矩形候補Sの中から画像処理に用いる四角形領域が選択されるのに応じて、グループ分け処理の結果に基づいて、選択された矩形候補Sが属するグループ内に含まれる矩形候補Sの表示を消去する。このような構成によれば、重心位置や大きさが微妙に異なる矩形候補Sが複数存在する場合であっても、ユーザは所望の四角形領域を快適に選択することができる。
(もっと読む)
画像処理装置、画像読取装置、画像形成装置及びプログラム
【課題】セル領域が罫線で区切られていない表が含まれている場合にも、画像から表領域を精度よく抽出する。
【解決手段】画像処理部は、入力画像から連結成分に応じたオブジェクトを判別し、各々のオブジェクトの外接矩形の辺の端点から見て、そのオブジェクトと隣り合うオブジェクトにおいてその辺と対向する辺の端点が所定の範囲内にある場合には、それらの端点に角リンクを付与する。そして、隣り合うオブジェクトとオブジェクトとにおいて、対応する端点同士に角リンクが付与されている場合には、その隣り合うオブジェクト同士を統合して統合オブジェクトとし、統合オブジェクトのオブジェクト間の結合の強さを示すスコアを角リンクに基づいて算出し、算出されたスコアがその統合オブジェクトに含まれるオブジェクトの数に応じた閾値以上である場合には、その統合オブジェクトの領域を表領域として抽出する。
(もっと読む)
ノイズ成分除去装置、ノイズ成分除去プログラムを記録した媒体
【課題】 画像に含まれる文字と背景とを分離することができなかった。
【解決手段】 二値化閾値算出(S2)では、白いエッジのヒストグラム作成(S1)にて作成されたヒストグラムを参照し、度数分布の裾野を二値化処理のための閾値とする。二値化(S3)では、二値化閾値算出(S2)にて設定された閾値と各階調値とを比較し、比較結果に基づいて二値化(S3)を行う。すなわち、入力画像の白いエッジを検出し、検出した白いエッジのヒストグラムを作成し、そのヒストグラムから裾野を計測して適切な二値化閾値を取得するというものである。
(もっと読む)
地図画像処理装置、地図画像処理方法、および、コンピュータプログラム
【課題】3次元地図データの作成を効率良く行う。
【解決手段】地図画像処理装置200は、3次元座標空間で表された3次元地図データを記憶する記憶部D13と、3次元地図データを所定の透視投影条件で透視投影して、2次元画像500に変換する座標変換部と、現実世界を撮影した撮影画像Fnを取得する撮影画像取得部と、撮影画像に含まれる路面標識実写画像と、2次元画像に含まれる路面標識投影画像とが一致するように、透視投影条件を修正する透視投影条件修正部と、撮影画像Fnに含まれるビルBLなどの地物の画像を、修正された透視投影条件で透視投影された2次元画像に含まれる地物に対応付けることにより、撮影画像に含まれる地物の画像を3次元地図データにテクスチャマッピングするテクスチャ適用部と、を備える。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】色が変更されてしまった画素塊の色を変更される前の色に再現する場合に、その画素塊の中央部分のみで再現した場合に比べて、より忠実に再現するようにした画像処理装置を提供する。
【解決手段】画像処理装置の2値化手段は、画像を2値化し、判定手段は、前記2値化手段によって2値化された画像内にある画素塊の周辺部分であるか否かを判定し、画素値算出手段は、前記判定手段によって周辺部分でないと判断された領域の画素値と前記画素塊の画素値に基づいて、前記画素塊の画素値を算出する。
(もっと読む)
障害物検出装置
【課題】撮影画像と背景画像とに基づく差分画像を用いて的確に障害物を検出する障害物検出装置を提供する。
【解決手段】カメラCにより車両の周辺を撮影する。画像取得部11は、カメラCから所定時刻毎に撮影画像を取得し、位置情報取得部12は、画像取得部11が撮影画像を取得した時点の車両の位置情報を取得する。背景画像記録部HDには、背景画像がその撮影時の位置情報と関連付けられて記録されている。視点変換部13は、撮影画像と背景画像とをそれぞれ視点変換撮影画像と視点変換背景画像とに変換する。障害物検出部15は、視点変換撮影画像と視点変換背景画像との差分画像に基づいて、障害物を検出する。
(もっと読む)
車両用車線認識装置
【課題】コスト負担を抑制しつつ、投受光器との通信を行なう際に車両の走行している車線を認識することが可能な車両用車線認識装置を提供すること。
【解決手段】光ビーコンから情報を取得可能な車両に搭載される車両用車線認識装置であって、車両の位置を取得する車両位置取得手段と、地図データを記憶した地図データ記憶手段と、車両周辺を撮像する撮像手段と、前記車両位置取得手段により取得された車両の位置、及び前記地図データを用いて、前記光ビーコンが存在すると予想される所定エリアに車両が接近しているか否かを判定し、前記所定エリアに車両が接近していると判定した場合に前記撮像手段を作動させる制御手段と、を備える車両用車線認識装置。
(もっと読む)
速度規制標識認識結果の通知方法
【課題】速度規制標識32の認識正解率が100%に達しないシステムにおいても、運転者に適切な制限速度情報の提供が行える速度規制標識認識結果の通知方法を提供する。
【解決手段】撮像部1で車両前方画像30を撮像し、この車両前方画像30内の速度規制標識32を画像処理部2で自動認識し、この自動認識過程の前記車両前方画像30内の速度規制標識32部分の画像を第1画像5として表示すると共に、前記自動認識した結果から導かれたイメージ画像からなる第2画像6を並べて表示する。これにより、運転者が上記ペア画像5、及び6を比較でき、速度規制標識32の内容に関して、正しい判断を行うことが出来る。
(もっと読む)
運転支援装置
【課題】軽度の眠気を検出できる運転支援装置を提供する。
【解決手段】運転手の顔を撮像する撮像手段11と、前記撮像手段により撮像された顔画像から運転手の口の動きを検出する検出手段F2と、前記検出手段により検出された前記口の形状変化から前記運転手の特徴動作を検出する特徴検出手段F3と、前記特徴検出手段により検出された特徴動作の経時的変化から前記運転手の覚醒度低下の初期状態を判定する判定手段F4と、を備える。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】欠陥の有無を正確に検出し、検査対象物が良品であるか否かを精度よく判定する。
【解決手段】微分演算部50は、撮像装置2からの撮像画像に対して各画素の濃度に基づく微分演算を行い、各画素の微分絶対値を算出する。エッジ画素抽出部51は、微分絶対値が規定値以上である画素をエッジ画素として抽出する。位置検出用ランド抽出部52は、互いに隣接するエッジ画素の集合を位置検出用ランドとして抽出する。濃淡2値化演算部60は、撮像画像の各画素に対して2値化を行って欠陥候補画素を抽出する。欠陥候補ランド抽出部61は、互いに隣接する欠陥候補画素の集合を欠陥候補ランドとして抽出する。計測部62は、欠陥候補ランドの画素数を計測する。判定部7は、欠陥候補ランドの画素数が規定画素数以上である場合、検査対象物が不良品であると判定する一方、欠陥候補ランドの画素数が画素数閾値未満である場合、検査対象物が良品であると判定する。
(もっと読む)
情報処理装置及びプログラム
【課題】処理要素群を再構成する処理効率を向上させる。
【解決手段】情報処理装置10は、複数の処理要素のうち統合又は処理順序の交換が可能な処理要素の組毎に、当該組の処理要素間の統合又は処理順序の交換に関する関係情報を格納し、複数の処理要素を含む対象処理要素群を取得し、取得した対象処理要素群に含まれる処理要素に関して格納される関係情報を抽出し、抽出した関係情報の統合に関する情報に基づいて、対象処理要素群に含まれる処理要素の中から統合する処理要素の組を決定し、決定した処理要素の組に基づいて、対象処理要素群に含まれる処理要素と当該対象処理要素群に含まれる各処理要素間の関係情報を更新し、更新された関係情報の処理順序の交換に関する情報に基づいて、更新された対象処理要素群に含まれる処理要素の処理順序を決定する。
(もっと読む)
画像処理装置及び交通監視装置
【課題】 現地の環境や天候によって変化する路面の影響を受けずに停止車両、渋滞,落下物等の交通事象を検知することにある。
【解決手段】 道路に設置された監視カメラ1と、このカメラ映像から背景差分法を用いて車両候補領域を抽出する車両候補領域抽出部11と、カメラ映像から環境や天候によって変化する路面の状態を考慮して路面の領域を抽出する路面領域抽出部12と、前記車両候補領域と前記路面領域とを演算し、車両候補領域の中に含まれる現地の環境や天候の変化によって現れるノイズ領域及び路面領域を除外し、車両領域を検出する車両領域検出部13と、この車両領域検出部13から出力される車両領域の位置及び前記路面に対する前記車両領域の割合から交通事象を検知する交通事象検知部3と、この検知された交通事象をカメラの映像上に表示するモニター表示装置4とを備えた交通監視装置である。
(もっと読む)
漏洩検知装置
【課題】微粉炭、水蒸気、水、油等の漏洩を高精度で自動的に早期検知する装置を提供する。
【解決手段】微粉炭漏洩検知装置1は、防曝カメラ5A〜5Nで撮影した予め定められた枚数の連続する画像を平均化したイニシャル画像と現在画像をそれぞれ生成するイニシャライズ処理部及び現在画像生成部を備える。差分画像作成部は現在画像とイニシャル画像との差分である差分画像を作成する。検知処理部は、記差分画像を、低濃度閾値と高濃度の高濃度閾値とで二値化する。低濃度閾値により得られる低濃度反応領域があれば低濃度カウンタをインクリメントし、前記高濃度閾値により得られる高濃度反応領域があれば高濃度カウンタをインクリメントする。低濃度カウンタの値が設定値に達すると漏洩発生と判断してアラーム発報を実行する。高濃度カウンタの値が設定値に達すると前記イニシャライズ処理部がイニシャル画像の生成を再実行する。
(もっと読む)
対象物の位置検出装置及び位置検出方法
【課題】入力画像の撮影環境が変化しても、対象物の位置検出精度を向上できると共に、該対象物の位置を短時間で(高速に)検出する。
【解決手段】位置検出装置10は、入力画像を輝度変換して変換処理画像を生成する輝度変換処理部16と、入力画像と参照画像とのテンプレートマッチングを行って、入力画像に写っている孔の位置を検出すると共に、該位置における入力画像と参照画像との相関値を算出し、一方で、変換処理画像と参照画像とのテンプレートマッチングを行って、変換処理画像に写っている孔の位置を検出すると共に、該位置における変換処理画像と参照画像との相関値を算出するテンプレートマッチング処理部24と、各相関値を比較し、最大の相関値に対応する孔の位置を入力画像に写っている孔の位置として出力する相関値比較処理部28とを備える。
(もっと読む)
画像編集装置
【課題】画像処理のパラメータをユーザに意識させずに、従来のものより自由かつ簡単に画像処理のパラメータの値を設定させることができる画像編集装置を提供すること。
【解決手段】画像処理を実行する画像処理部12と、画像処理に利用されるパラメータの基準値を決定するパラメータ基準値決定部13と、パラメータの変動幅を決定するパラメータ変動幅決定部14と、基準値をパラメータの値とした画像処理の結果を表す第1プレビュー画像、および、基準値を変動幅で変動させていった値をパラメータの値とした画像処理の結果を表す少なくとも1つの第2プレビュー画像を表示するプレビュー表示部15と、第1および第2プレビュー画像から1つのプレビュー画像を選択させるプレビュー画像選択部16とを備える。
(もっと読む)
161 - 180 / 782
[ Back to top ]