
Fターム[5B057CE12]の内容
画像処理 (340,757) | 処理部 画像基本処理 (31,097) | 濃淡(階調)処理 (5,694) | 2値化 (1,709)
Fターム[5B057CE12]の下位に属するFターム
擬似中間調処理 (927)
Fターム[5B057CE12]に分類される特許
101 - 120 / 782
顔マスキング装置及び方法
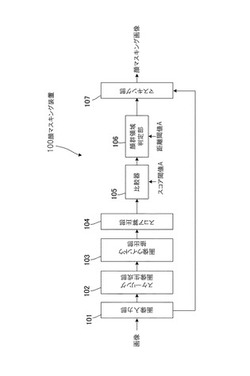
【課題】常に適切なマスキングが行える顔マスキング装置及び方法を提供する。
【解決手段】画像ウインドウ抽出部103は、入力画像から少なくとも2つの画像ウインドウを抽出し、スコア算出部104は、抽出された画像ウインドウ内の顔の確からしさを示すスコア値を算出し、比較器105は、算出されたスコア値を所定のスコア閾値Aと比較し、その結果に応じて顔検出領域を設定し、顔群領域判定部106は、比較器105で設定された顔検出領域間の距離を所定の距離閾値Aと比較し、その結果に応じて顔検出領域を含む顔群領域を設定する。比較器105及び顔群領域判定部106は、スコア値がスコア閾値A以上の1又は複数の領域を包括する範囲を顔群領域範囲として判定するので、人物の顔の一部が隠蔽、顔同士が近接していた場合においても、従来技術において発生していたマスキングミスを抑制でき、顔領域を的確にマスキングすることができる。
(もっと読む)
画像処理装置および画像処理方法

【課題】対象物の形状や処理の目的などに応じて、個々の部位を詳細に計測するのに必要な処理シーケンスを自由に設定できるようにし、その設定のための操作性を高める。
【解決手段】指定操作受付部106は、モデルデータ記憶部103を用いて対象物の全体形状を示す画像を生成し、この画像を含み、処理項目の選択が可能な設定画面を表示して、共通処理用の処理シーケンスを設定するための操作と、部位別処理用の処理シーケンスを設定するための操作と、部位別処理の処理対象部位を指定する操作とを受け付ける。共通処理用の処理シーケンスは、部位別処理を実行することを定義した処理項目を含み、この項目を介して共通処理用および部位別処理用の各処理シーケンスが対応づけられて登録される。また、指定された処理対象部位に対するモデルデータ中の対応データを表す情報が、部位特定情報として、部位別処理に紐付けられた状態で登録される。
(もっと読む)
車載白線認識装置
【課題】横断歩道や複合線が存在しても、白線を正しく認識できる車載白線認識装置を提供すること。
【解決手段】車両周囲の画像を取得する車載カメラ10と、車載カメラ10で取得した画像から画像処理により白線候補を抽出する白線候補抽出手段30と、白線候補の白線らしさの確信度を算出する確信度算出手段40と、確信度算出手段40が算出した確信度に基づき、認識する白線を選択する白線選択手段50、60と、車載カメラ10で取得した画像から画像処理により複合線を検出する複合線検出手段40と、車載カメラ10で取得した画像のうち、複合線検出手段40により検出した複合線を除外した領域において、画像処理により横断歩道を検出する横断歩道検出手段120とを備え、確信度算出手段40は、白線候補が横断歩道検出手段120により検出した横断歩道に属する場合、それ以外の場合よりも、その白線候補の確信度を低くすることを特徴とする車載白線認識装置1。
(もっと読む)
汚泥処理装置及び汚泥処理方法
【課題】 汚泥原液中のフロックの凝集状態を撮影して、凝集剤の添加量及び凝集剤撹拌機の回転数を調整する汚泥処理装置及び汚泥処理方法を提供する。
【解決手段】 汚泥原液供給管33を通過する凝集フロックを撮像する撮像部11と、撮像部11が撮像した凝集フロックの画像を2値化し、2値画像を生成する変換部18と、変換部18が生成した2値画像に表示された凝集フロックの面積である凝集フロック測定面積及び予め設定した初期の凝集剤添加率に基づいて凝集フロック基準面積を算出する算出部13と、凝集フロック測定面積と凝集フロック基準面積とを比較する比較部14と、比較部14による比較結果に応じて、凝集剤供給ポンプ29及び凝集剤撹拌機21の回転数を制御する制御部15と、比較部14による比較結果に応じて、警報を発する出力部16とを備える。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】出力先の制限を考慮せずにベクトルデータを出力する場合に比べて、出力形式の制限を超えるベクトルデータが出力されることを抑制する、画像処理装置及び画像処理プログラムを提供する。
【解決手段】画像抽出部50で抽出したオブジェクト毎に、トグル数計数部72で計数されたトグル数に関する出力先の変換条件、制御点計数部74で計数された制御点に関する出力先の変換条件、及びオン画素量計測部76で計測されたオン画素量に関する出力先の変換条件を満たすか否かについてベクトル変換判定部52で判断し、満たさない場合はイメージデータをベクトルデータに変換せずにイメージデータのまま、満たす場合はベクトル変換部64によりベクトルデータに変換してファイル77に出力する。
(もっと読む)
検査方法、検査装置、プログラム及び画像形成装置の製造方法
【課題】加工孔又は凹部が施された検査対象物の良否を、高感度で、誤検出を抑制して、判定することができない。
【解決手段】撮像手段で撮像した画像をデジタル化した画像データから得られる画像データを構成する輝度配列の座標系を、rθ極座標変換の基準点を孔又は凹部中心付近として極座標系輝度配列に変換する画像処理をし、極座標系輝度配列の中で、基準点から半径rにおける輝度配列を抽出し、複数箇所の輝度値から輝度配列の位相を特定し、半径rの値を変更して位相特定より特定される位相を複数取得し、平均化し、平均化された位相と各半径rにおける輝度配列の少なくとも2箇所の輝度値とにより、周期性のある輝度値配列を各半径r毎に新たに生成し、判定基準輝度値配列とし、極座標系輝度配列の各半径rにおける輝度配列の値と各半径rに対応する判定基準輝度値配列とを照合して良否を判定する。
(もっと読む)
ゴルフスイングの診断方法
【課題】スイングの良否が手軽に診断できる方法の提供。
【解決手段】ゴルフクラブをスイングしてゴルフボールを打撃するゴルファー及びこのゴルフクラブを、カメラ10が撮影する。撮影により、画像データが得られる。演算部16は、この画像データからフレームを抽出する。演算部16は、このフレームのエッジ画像を得る。演算部16は、このエッジ画像に対して所定の閾値に基づく二値化を施し、二値化画像を得る。演算部16は、この二値化画像にハフ処理を施してゴルフクラブのシャフトの位置を抽出し、ゴルフクラブの先端座標を特定する。演算部16は、異なるフレーム間の先端座標を対比することにより、アドレス時の仮フレームを決定する。演算部16は、仮フレームよりも所定数後のフレームから逆送りで各フレームの基準領域内の色情報を算出し、この色情報の変化に基づいてアドレス時のフレームを決定する。
(もっと読む)
画像処理装置及び電子機器
【課題】画像上に写り込んでいる不要オブジェクトを簡便に除去する。
【解決手段】人物312が不要オブジェクトである場合、タッチパネル機能を利用してユーザが人物312を指定することで、人物312の画像領域が不要領域に設定される。画像補正部は、不要領域を含む補正対象領域320を設定する一方で、補正対象領域320から不要領域を除外した部分の画像をテンプレートとして用いて、その画像の類似領域を入力画像310内から探索する。類似領域331が見つかると、画像補正部は、類似領域331を包含する画像領域を補正パッチ領域340として設定し、補正対象領域320の画像データと補正パッチ領域340の画像データを混合することで補正対象領域320内の画像を補正する。
(もっと読む)
区画線認識システム、区画線認識方法、及び区画線認識プログラム
【課題】路面上の区画線を高精度に認識すること。
【解決手段】区画線認識システムは、自車の車速を検出する車速検出手段と、自車のヨーレートを検出するヨーレート検出手段と、路面の原画像を入力する画像入力手段と、複数の異なる時刻における原画像に基づいて合成鳥瞰画像を生成し、合成鳥瞰画像に、合成鳥瞰画像を生成したときの車速とヨーレートとを関連付ける合成鳥瞰画像生成手段と、原画像および合成鳥瞰画像のうち少なくとも一方から、区画線候補を検出する区画線候補検出手段と、合成鳥瞰画像と関連付けられた車速およびヨーレートとに基づいて、車両の直進区間を抽出し、直線区間毎に区画線候補を認識し、認識した区画線候補が区画線として適しているか否かを検定する区画線候補検定手段と、を備えている。
(もっと読む)
画像処理装置、画像形成装置、画像処理プログラム
【課題】画像上で直線状に延びる不要成分を除去したいえで有効領域を設定することができる画像処理装置及び画像処理プログラムを提供する。
【解決手段】二値化部11で二値化した画像の各画素について、判定部12で有効か否かを判定し、有効と判定された画素を包含する領域を有効領域として領域設定部13が設定する。判定部12における判定の際には、判定対象の画素と予め決められた位置関係にある複数の判定領域を、それぞれ他の判定領域と重なりをもつとともに、予め決められた方向には重ならないように配置する。そして、各判定領域の二値のうちの一方の値の画素数に従って判定領域が有効か否かを判断し、有効と判断された判定領域の数により判定対象の画素が有効か否かを判定する。
(もっと読む)
異物検出装置および異物検出方法
【課題】照明の輝度変化および検査対象物の構造による輝度変化による誤検出を低減し、安定して異物を検出可能な異物検出装置および異物検出方法を提供すること。
【解決手段】異物検出装置は、検査対象を撮像した撮像画像に対して各画素の輝度を検出し、この輝度に基づいて全画素から対象画素を抽出する対象画素抽出手段621と、前記対象画素と前記対象画素の周辺に位置する複数の周辺画素との輝度差を検出する輝度差検出手段(フィルター処理手段622)と、前記輝度差に基づいて異物の有無を判定する異物判定手段624と、を備えている。
(もっと読む)
画像処理装置、画像処理方法、プログラム、及び電子機器
【課題】ユーザを撮像して得られる撮像画像に基づいて、ユーザまでの距離を精度良く検出する。
【解決手段】LED21aは、被写体に対して第1の波長の光を照射し、LED21bは、被写体に対して第1の波長とは異なる第2の波長の光を照射し、カメラ22は、第1の波長の光が照射されている被写体を撮像して第1の撮像画像を生成し、第2の波長の光が照射されている被写体を撮像して第2の撮像画像を生成し、2値化部43は、第1及び第2の撮像画像に基づいて、被写体の肌領域を検出し、座標検出部44は、第1及び第2の撮像画像上の肌領域における、対応する画素の輝度値どうしの差分絶対値に基づいて、被写体までの距離を算出する。本発明は、例えば、ユーザを撮像して得られる撮像画像から、ユーザまでの距離を算出するコンピュータ等に適用できる。
(もっと読む)
外観検査装置、外観検査システムおよび外観検査方法
【課題】検査対象の良否を判定する際に欠陥領域を途切れないように検出する。
【解決手段】外観検査システム1において、外観検査装置3の画像処理部321は、濃淡画像を用いて微分2値化画像を作成する。第1の抽出部322は、同一の欠陥候補領域を構成する画素群を抽出する。検出部324は、各ラインごとに、微分絶対値が閾値以上である画素をエッジ画素として検出する。第2の算出部326は、第2の抽出部325で抽出された欠陥領域について水平方向の射影幅と垂直方向の射影幅とを求める。判定部327は、水平方向の射影幅と垂直方向の射影幅との少なくとも一方が基準値より大きい場合に、検査対象Aが不良であると判定する。上記検出部324は、第1の算出部323で求められた欠陥幅が最大となるラインから順に各ラインごとにエッジ画素を検出し、欠陥幅が狭いほど次のラインの閾値が低くなるように次のラインの閾値を設定する。
(もっと読む)
手の平認識
【課題】 個別コードのない、人の両手の指10本(他者も加えると10本以上)を同時に異なった座標として認識することができ、また、指が盤面に接地する面積により、指を押し付ける圧力を検知できる装置。更に、手の平全体といった広い面積も認識することができ、これらをリアルタイムに演算処理することで、コンピュータ機器のソフトウェアのコントロールを可能にする。
【解決手段】 赤外線を満たした透明な板の表面に接する指もしくは手の平の反射光をカメラで撮像し、 その原画像から2値化処理、収縮処理、膨張処理、画像の論理積取得処理、レンズ収差の補正処理を行い、精度の高い座標情報をリアルタイムに抽出する。
(もっと読む)
画像処理装置および画像処理方法
【課題】 階調変換処理における画素生成の遅延と細線の再現性を改善する。
【解決手段】 データ補正部104は、注目画素の入力画像データに、注目画素の周辺画素の誤差データから算出された注目画素に対する拡散誤差積算値を加算する。量子化部105は、拡散誤差積算値が加算された画像データを、量子化閾値を用いて量子化する。加算器106は、量子化の結果と、拡散誤差積算値が加算された画像データから、注目画素の誤差データを算出する。閾値制御部102と閾値設定部103は、注目画素の入力画像データに応じた量子化結果を有する、注目画素の周辺画素を検出し、検出された周辺画素に応じた範囲内の周辺画素の入力画像データと量子化結果の誤差データの加算値を求め、加算値に応じて注目画素に対する量子化閾値を設定する。
(もっと読む)
目の位置の検出方法および検出システム
【課題】一画像中に複数の顔画像を含む元画像から目の位置を、簡便な手法で信頼性高く自動的に検出できるようにする。
【解決手段】複数の顔画像を含む元画像からの目の位置の検出方法が、A.元画像から走査対象画像を作成し、そこに顔画像サイズの枠を走査して目の位置の検出対象領域を検出する工程、B.目の位置の検出対象領域ごとに、目の位置検出用画像として明度が変化した複数の画像を作成し、目の位置検出用画像が高明度でフェードアウトした状態から低明度へフェードインするのに伴い、フェードアウトした顔領域に漸次現れる画素の固まり領域に基づいて目の位置候補を特定する工程からなる。
(もっと読む)
画像比較および文書認証のための画像位置合わせの方法
【課題】画像比較による文書認証において、有用な画像位置合わせ方法を提供する。
【解決手段】オリジナル文書画像のページの隅近くに、位置合わせマーカとして機能するバーコードスタンプが付加される。バーコードスタンプを含むオリジナル文書画像は印刷、回覧され、その間にオリジナル文書画像はデータベースに記憶される。印刷された文書を認証するには、印刷された文書をスキャンしてターゲット文書画像にし、そのターゲット文書画像が記憶されたオリジナル文書画像と比較される。バーコードスタンプは大域的画像位置合わせを行うための位置合わせマーカとして用いられる。次いで、ターゲット画像およびオリジナル画像は複数のサブ画像に分割され、画像比較を行う前に各サブ画像に対して局所的画像位置合わせが行われる。サブ画像の対から差分サブ画像が生成され、印刷された文書における改ざんを検出するために大域的差分画像にマージされる。
(もっと読む)
被覆電線検査装置およびそれを備えた電線処理機
【課題】被覆電線の端部の状態を的確に検査することのできる被覆電線検査装置およびそれを備えた電線処理機を提供する。
【解決手段】被覆電線検査装置Aは、被覆Hが剥ぎ取られた芯線Sの端面Tを撮像するCCDカメラ3と、CCDカメラ3により撮像された画像から芯線Sの本数を計測可能な計測手段9aと、計測された芯線Sの本数が予め定められた所定の本数と一致するか否かに基づいて、被覆電線Dの端部の状態の良否を判定する判定手段9bと、を備えている。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】2値画像を対象とした画像処理において、その画像処理により発生する画質劣化を防止しつつ、対象とした2値画像と画像処理後の2値画像の濃度が変化することを抑制するようにした画像処理装置を提供する。
【解決手段】画像処理装置の計数手段は、2値画像の黒画素数又は白画素数を計数し、画素数算出手段は、前記2値画像に対する変形量と前記計数手段によって計数された画素数に基づいて、該2値画像を変形した場合の黒画素数又は白画素数を算出し、変形手段は、前記2値画像に対して前記変形量に基づいて前記変形を行い、閾値算出手段は、前記変形手段によって変形された画像の画素値ごとの画素数と前記画素数算出手段によって算出された画素数に基づいて、前記変形手段によって変形された画像を2値化する場合の閾値を算出し、2値化手段は、前記閾値算出手段によって算出された閾値に基づいて、前記変形手段によって変形された画像を2値化する。
(もっと読む)
形状計測装置及び方法並びにプログラム
【課題】試験体に沿って移動させる機構を不要とすること。
【解決手段】試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各画素を第1方向に分割して複数の小領域を定義するとともに、各小領域の輝度情報を、各画素の輝度情報および第1方向に隣接する他の画素の輝度情報に基づいて決定する小領域定義部21と、第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、小領域定義部21により決定された各小領域の輝度情報を第1方向に走査して、輝度情報が所定の閾値を越える境界の小領域の位置情報を抽出する作業を実施して試験体の輪郭データを生成する輪郭データ生成部22とを備える。
(もっと読む)
101 - 120 / 782
[ Back to top ]