
Fターム[5B057CF05]の内容
Fターム[5B057CF05]に分類される特許
321 - 340 / 435
外観検査方法及び外観検査装置
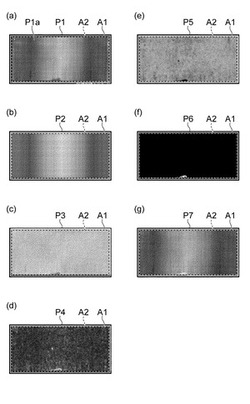
【課題】 検査対象物における欠陥の形状や各検査対象物に形成されたそれぞれ異なる研磨筋等によらず、検査対象物の欠陥を確実に検出すること。
【解決手段】 本発明に係る外観検査方法は、検査対象物22を撮像して撮像画像P1を取得する工程と、軸X,Y方向における検査対象物画像P1aの平均輝度分布を算出する工程と、マスタ画像P2を平均輝度分布に基づいて生成する工程と、撮像画像P1とマスタ画像P2とから第1補正画像P3を生成する工程と、ソーベルフィルタにより第1補正画像P3における各画素の輝度値の変化量を算出してソーベル処理画像P4を生成する工程と、ソーベル処理画像P4と第1補正画像P3とから第2補正画像P5を生成する工程と、第2補正画像P5を2値化して連結領域を特定し、その連結領域の画素数と閾値とを対比する工程とを備える。
(もっと読む)
欠陥判定方法

【課題】 電極パターン等が形成された基板の歩留まりを向上させ、製造ロスコストを低減することが可能な欠陥判定方法を提供する。
【解決手段】 所定のパターンを有する被検査対象物を撮像し、撮像した画像から正常パターン126を除去してラベル121を抽出し(ステップS11)、ラベル121の外接矩形122を算出し(ステップS12)、外接矩形122の所定の一辺に垂直であり、かつ外接矩形122の重心又はラベル121の重心を通る重心線125でラベル121を第1領域123と第2領域124とに分け(ステップS13)、重心線125に対する第1領域123及び第2領域124の線対称性を判定してラベル121が欠陥パターンであるか否かを判定する(ステップS14、S15)。
(もっと読む)
サングラス検出装置及び顔中心位置検出装置
【課題】 人物画像からサングラスの有無を判別し、サングラスの有無にかかわらず、人物画像から中心位置などを判別することを可能とする。
【解決手段】 カメラ10でドライバーの顔を撮影して得られた顔画像を画像メモリ22に記憶する。CPU24は、顔画像について、目の検出処理を行い、目が検出されれば、通常の顔中心位置の測定を行う。CPU24は、目が検出できない場合、サングラスのサイズに合わせた白黒白エッジ検出処理を実行し、検出された白黒白エッジに基づいて、サングラスの画像の有無を判別する。サングラスを検出すると、サングラスに代えて、目の画像を合成し、目の画像を合成した顔画像に基づいて、顔中心位置を判別する。
(もっと読む)
道路ネットワークデータの自動生成方法
【課題】 デジタル地図データベースの道路に関連する図形データを利用して、低コストでより高精度の道路ネットワークデータを自動生成すること。
【解決手段】 道路ネットワーク自動生成システムは、道路ネットワークデータの入出力等を行う中央処理装置1と、キャラクタ及びグラフィック画面を有するキ−ボ−ド装置2付きディスプレイ装置3と、中央処理装置1から参照可能なデジタル地図データファイル4と、を有している。中央処理装置1は、道路データ抽出処理部5、ベクトル画像変換処理部6、道路中埋め処理部7、細線化処理部8及び形状補整処理部9を有している。デジタル地図データファイル4は、CDドライブまたは記憶装置に格納されており、これを中央処理装置1に読み込み、中央処理装置1の道路データ抽出処理部5、ベクトル画像変換処理部6、道路中埋め処理部7、細線化処理部8、形状補整処理部9で自動生成した道路ネットワークデータをディスプレイ装置3に表示する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】 取得された顔画像の顔と識別対象の顔画像の顔とが、異なる向きである場合、識別対象の顔であるか否かの識別を行なう。
【解決手段】 任意方向顔検出部12は、画像入力部11に入力された顔画像の顔が向いている方向を検出する。顔特徴位置検出部13は、顔画像から特徴となる顔の位置を検出する。局所特徴量算出部14は、顔特徴位置検出部13により検出された顔の特徴位置の近傍の画像から特徴量を算出する。データベース16には、識別対象とされている顔の特徴量が登録されている。写像部15は入力された顔の方向と、登録されている顔の方向が一致するように、局所特徴量算出部14から供給された特徴量を、データベース16に予め登録されている写像関数を用いて写像する。顔識別部17は、写像された特徴量とデータベース16に登録されている特徴量とから、登録されている人であるか否かを判断する。
(もっと読む)
表示パネルの検査方法および検査装置
【課題】 ラビングスジ欠陥を高精度に検出できる表示パネルの検査方法および検査装置の提供。
【解決手段】 表示パネルの検査装置は、スジ欠陥強調手段300と、前記スジ欠陥強調手段300において強調された画像に基づいて、スジ欠陥とラビジングスジ欠陥とを分別する欠陥分別手段400と、前記欠陥分別手段400においてラビングスジ欠陥と分別された欠陥を評価するラビングスジ欠陥評価手段500とを備える。欠陥分別手段400は、スジ欠陥強調手段300で強調された各スジ欠陥が、ほぼ直線状の欠陥であり、かつ、スジ欠陥の形成方向がそのパネルに対してラビング処理された方向にほぼ一致する場合にはラビングスジ欠陥と判別し、それ以外の場合にはスジ欠陥と判別する。このため、欠陥幅や長さ、間隔などが変動していても、それらの影響を受けることなくラビングスジ欠陥を確実に判別できる。
(もっと読む)
白線検出装置
【課題】
道路に影がある場合に白線の検出精度の低下を抑制できる白線検出装置を提供すること。
【解決手段】
道路20を撮影した画像に基づいて道路20に引かれた白線を検出する白線検出装置であって、画像内において影領域を設定し、その影領域においては影領域以外の領域と比べてしきい値を下げることなどにより白線が検出されやすいようにして白線検出を行う。これにより、道路に影がある場合に白線の検出精度の低下を抑制できる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 情報欠落画素を除外した元画像に対してそのまま所要の処理を行うことができ、画像処理の負担を軽減して動作速度の向上を図る。
【解決手段】 カラー撮像デバイスで作られた画像を取り込む取り込み工程(S1)と、前記取り込み工程で取り込まれた画像を所定方向に45度回転させて新たな座標系の回転画像を生成する第一の座標変換工程(S2)と、前記回転画像に対して画像処理を行う画像処理工程(S3)と、前記画像処理後の画像を前記所定方向の逆方向に45度回転させて元の座標系の画像に反映させる第二の座標変換工程(S4)とを含む。単板式のカラー撮像デバイスで作られた画像に含まれる情報欠落画素の補間処理を必要とせずに、所要の画像処理を実行できる。
(もっと読む)
撮影システム、撮影方法及び該方法を実行するためのプログラム
【課題】 本発明は、被写体の位置、傾きや向きを解析し、解析結果をフィードバックし、対話的に3次元を考慮した撮影状態とすることができる。
【解決手段】 本発明の撮影システムは、被写体を撮影する撮像手段と、撮像手段によって得た被写体の画像を解析する画像解析手段と、画像解析手段による解析結果を被写体に報知する報知手段とを具備している。
(もっと読む)
面積導出方法
【課題】 安定して面積を導出すること。
【解決手段】 画像の少なくとも一部の領域における画像情報のヒストグラムを算出する(ステップ101、102)。次いで、前記ヒストグラムの凸部の個数に基づいて、複数の確率分布関数を用いて前記ヒストグラムの近似式を算出する(ステップ103、104)。次いで、前記確率分布関数の各々の積分値を算出し、前記領域の全画素数又は前記積分値の総和で前記積分値を除算する(ステップ105)。
(もっと読む)
画像処理装置、画像処理方法
【課題】 画像中における所定の被写体の検出をより簡便且つ高精度に行うための技術を提供すること。
【解決手段】 輝度画像上の各位置に配置した所定サイズの矩形内の顔確率を求め(S108)、それぞれの領域の顔確率に基づいてそれぞれの領域の確率分布を求め、このそれぞれの確率分布を示す第1マップデータを作成し(S109)、輝度画像の第2縮小画像乃至第N縮小画像を生成し(S105)、第n縮小画像上の各位置に配置した上記矩形内の領域の顔確率を求め(S108)、それぞれの領域の顔確率に基づいてそれぞれの領域の確率分布を求め、このそれぞれの確率分布を示す第nマップデータを第(n−1)マップデータに合成する処理をn=2〜Nについて繰り返すことで合成マップデータを作成する(S109)。
(もっと読む)
画像処理装置、画像処理方法
【課題】 画像中の被写体を高速、且つ高精度に検出するための技術を提供すること。
【解決手段】 輝度画像の縮小画像内における目候補領域の位置を検出し(S104)、検出した位置のうち2つを包含し、且つこの2つの位置で規定される顔候補領域が顔パターンではない場合には、この顔候補領域内のそれぞれの目候補領域の位置近傍に近傍領域を設定し(S107)、一方の近傍領域内で取りうる第1の位置と、他方の近傍領域内で取りうる第2の位置とを包含し、且つ第1,2の位置で規定される顔候補領域が顔パターンであるのかを判別する(S110)。
(もっと読む)
バーチャルリアリティシステム及び方法、並びに、補間画像生成装置及び方法
【課題】映像の滑らかな動きと、高画質とを両立させて、仮想体験のリアリティを向上させること。
【解決手段】利用者に視点操作をさせる機能と、
生成済みの画像データに対して、この画像データが生成されたときの投影条件からの視点操作による変更に伴う幾何学変形操作を加えることによって、投影条件変更後の画像データを生成する機能と、
投影条件変更後の画像データを出力する機能とを有することを特徴とするバーチャルリアリティシステム。
(もっと読む)
画像処理装置、画像処理方法
【課題】 経験的な閾値を必要とせず、画像中における所定の被写体の検出をより簡便且つ高精度に行うための技術を提供すること。
【解決手段】 輝度画像上の各位置に配置した所定サイズの矩形内の顔確率を求め(S106)、それぞれの領域の顔確率に基づいてそれぞれの領域の確率分布を求め、このそれぞれの確率分布を示す第1マップデータを作成し(S109)、輝度画像の第2縮小画像乃至第N縮小画像を生成し(S103)、第n縮小画像上の各位置に配置した上記矩形内の領域の顔確率を求め(S106)、それぞれの領域の顔確率に基づいてそれぞれの領域の確率分布を求め、このそれぞれの確率分布を示す第nマップデータを第(n−1)マップデータに合成する処理をn=2〜Nについて繰り返すことで合成マップデータを作成し、合成マップデータを用いて代表パターンを選択する(S115)。
(もっと読む)
画像処理装置、画像圧縮方法、画像圧縮プログラムおよび圧縮画像のデータ構造
【課題】 画像データを圧縮しても罫線のガタツキを目立たなくすること。
【解決手段】 MFPは、画像データを入力するスキャナ部103と、入力された画像データから罫線を含む罫線領域を抽出する領域判別部11と、罫線領域の画像データから罫線の中心画素を少なくとも含む罫線2値化データを生成し、罫線領域の画像データから罫線データを補間するための補間2値化データを生成する罫線2値化部14と、罫線2値化データおよび補間2値化データそれぞれを圧縮して第1および第2圧縮データを生成する可逆圧縮部15と、画像データから罫線領域を除いた領域を圧縮して第3および第4圧縮データを生成するか逆圧縮部13および非可逆圧縮部17と、第1圧縮データと、第2圧縮データと、第3圧縮データとを結合して結合データを生成する結合部18と、を備える。
(もっと読む)
顔画像処理方法および顔画像処理装置
【課題】形状補間比率を連続的に変えて複数の顔画像を合成する場合、顔の特徴的な部分の位置が動くのを防止するとともに、合成後の顔画像を、部品単位でいずれかの顔画像に似せることを可能とし、また、簡単な計算量で顔の表情を変化させることを可能とする。
【解決手段】顔画像G1を背景となる顔画像G3に大まかに整合する第1の形状整合処理部11および顔画像G2を背景となる前記顔画像G3に大まかに整合させる第2の形状整合処理部12と、前記顔画像G1,G2のそれぞれの整合後の形状モデルおよび前記顔画像G3の形状モデルのそれぞれ対応する点の座標値を所定の比率で形状補間する形状補間処理部1と、この形状補間処理部1にて形状補間された形状モデルに対し、それぞれ対応する画素について所定の比率で色補間する色補間処理部2を設けた構成とする。
(もっと読む)
画像処理プログラムおよび画像処理装置および画像処理方法
【課題】
画像データのスケールを変更した場合であっても該画像データに含まれる線の識別性を確保した状態で画像処理できるようにした画像処理プログラムおよび画像処理装置および画像処理方法を提供する。
【解決手段】
入力部21を介してユーザにより画像データの表示状態の変更指示が行われると、制御部11のデータ変換部12により前記画像データの表示状態の変更処理が行われる。この表示情報の変更処理では、割り当て部13の再割り当て方式または自動調整方式のいずれかによる画像データが有する線の線幅の割り当て処理が設定テーブル管理部17で管理された設定テーブルの設定値にしたがって行われる。また、このときの割り当て処理では、変換前の線幅の種類と変換後の線幅の種類の変化を示した線幅変化テーブルを線幅変化テーブル作成部16で作成することにより線幅の種類数の増減発生により行う。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】 AAMの手法を用いてより簡易に入力画像の解像度を変換する。
【解決手段】 解像度変換部31が補正後の画像P1の解像度を変換し、顔検出部32が解像度変換後の画像P1′から顔部分P1fを検出する。再構成部33が、顔検出部32によって検出された顔部分P1fを、人間の顔部分が表された複数のサンプル画像に基づいてAAMの手法によって生成された、画像P1′と同一の解像度を有する数学モデルMjに適応させ、適応後の顔部分を表す画像を再構成して、解像度が変換された画像P2′を取得する。
(もっと読む)
画像生成システム
【課題】
少なくとも2つのパノラマ画像に基づいて、仮想3次元空間の指定した位置からの透視投影画像を生成し、表示する画像生成システムを提供することを目的とする。
【解決手段】
少なくとも2つのパノラマ画像に基づいて、仮想3次元空間に於けるユーザが指定した位置からの透視投影画像を生成する画像生成システムであって、画像生成システムは、パノラマ画像を読み込むパノラマ画像受付手段と、仮想3次元空間に於けるユーザが指定した位置の情報を受け付ける位置入力受付手段と、読み込んだ少なくとも2つのパノラマ画像から、受け付けた位置に於ける透視投影画像を生成する画像生成演算処理手段と、生成した透視投影画像を出力する表示処理手段と、を有する画像生成システムである。
(もっと読む)
コロニーの計数方法
【課題】シャーレ内で培養した微生物のコロニー数を、単色のCCDカメラを利用した簡易な装置構成で、培地に対する複雑な事前処理を必要としないで、種々の形状及び近接した微生物の微細なコロニーまで精度良く短時間に計数可能なコロニーの計数方法を提供する。
【解決手段】CCDカメラ7による撮影画像を撮影画像データとして取込んで、コロニーKの数を計数する計数画像領域13として設定し、計数画像領域13を中心画像領域10と周辺画像領域11に2分割して、それぞれの領域の画像条件に好適な異なるデータ処理手段により個別にコロニー数を算出する。また、中心画像領域10のコロニーKを大、小のサイズに分別して、それぞれに適したデータ処理によりコロニー数を別個に計数、加算して中心画像領域10のコロニー数を算出する。そして、中心画像領域10と周辺画像領域11のコロニー数を加算して計数画像領域13全体のコロニー数を求める。
(もっと読む)
321 - 340 / 435
[ Back to top ]