
Fターム[5B057CF05]の内容
Fターム[5B057CF05]に分類される特許
341 - 360 / 435
眼科測定装置

【課題】眼底画像のうち所定領域の指定が容易になり、該領域の正確な測定が可能となる眼科測定装置を提供する。
【解決手段】眼底画像の病変部41の外縁部41aをクリックすることによりその点の輝度値をしきい値として2値化された画像が得られる。複数の2値化画像のうち、病変部41bを指定すると、その領域41cのみが選択され、その領域の外周41dが取得される。そして、この外周を含む最小円42が演算され、それに基づいてこの病変部に照射されるレーザービームのスポット径が求められる。このような構成では、ユーザーが指定した所定点より輝度の高い領域を抽出することができ、網膜上の病変部の領域を指定したり特定するのが容易になる。
(もっと読む)
建物3次元形状補間方法、補間装置、補間方法のプログラム

【課題】撮影画像から建物の3次元形状を復元する際、処理の限界やエラーがあった場合でも建物を復元し、撮影経路上の建物を漏れなく再現する。
【解決手段】建物再投影部104は全方位画像にその位置情報をもとに建物形状モデルを再投影する。未復元領域抽出部105は再投影した建物位置をもとに建物形状モデルがまだ復元されていない領域を抽出する。建物存在判定部106は未復元領域に建物等が存在するかどうかを判定する。建物壁面抽出部107は抽出した未復元領域から建物壁面にあたる部分を抽出する。建物形状モデル復元部110は建物壁面の大きさや位置などの三次元情報を付与およびこれを利用して壁面に貼り付けるテクスチャ画像を全方位画像から切り出して作成し建物形状モデルとする。建物形状モデル更新部109は得られた建物形状モデルを建物形状モデル蓄積部103のデータとして更新する。
(もっと読む)
画像処理方法及び装置
【課題】画像処理に必要なメモリ容量を必要最小限にするとともに、画像処理に要する時間を短縮することのできる画像処理方法及び装置を提供する。
【解決手段】画像処理部70を構成するCPU74は、RIP8から送信されたランレングスデータを一旦メモリメモリ84に格納した後、ランレングスデータの状態で平行移動処理、拡大縮小処理、変形処理を行って露光部72のバッファ90に送信する。露光部72を構成する解凍変換処理部92は、バッファ90に格納された画像処理後のランレングスデータをビットマップデータに展開し、バッファ94を介してDMDコントローラ42に送信し、DMD36を駆動して基板に二次元画像を露光記録する。
(もっと読む)
特に薬理学的画像における一連の三次元画像の区分方法
本発明は、関心領域に分ける仕切りを有する三次元区分画像を得るために、開始画像または一連三次元画像を区分する方法に関し、前記画像または一連の画像は、各ボクセルについてn個の時間区間(n≧1)の間に、前記画像または一連の画像の少なくとも一つの変量を現す信号の実際の発現の測定値を含み、前記方法は、
a)信号の時空間的発現のパラメトリックモデルの定義を有する信号を設定するモデル化ステップ(10)であって、前記モデルが均一なパラメータセットを含み、前記セットはそれぞれ前記関心領域に対応する構造に特有であるステップ:
b)サンプルがそれぞれ前記構造に含まれるようにボクセルのサンプルを抽出するステップ(30)、そして
c)発現モデルが同一の構造に特有の前記サンプルをグループ化して当該サンプルを併合するステップであって、1つのグループのサンプルを寄せ集めることによって、前記併合が、前記画像もしくは一連の画像、または後者の関心領域の全ボクセルの分類に続いてまたは先行してあるいは含むステップ、
で基本的に構成される。
(もっと読む)
木材の節探査方法及び装置及びプログラム
【課題】木材の節及び皮を持つ死節を確実に検出できるようにすること。
【解決手段】撮影手段8で木材を撮影し、画像処理手段1で前記撮影した木材の画像から画像の円形度を計算し、該計算した円形度の大きいものを節として検出する。また、画像処理手段1で前記撮影した木材の画像から節の部分の画像を切り出し、該切り出した部分での各画素の色空間から所定の閾値で切り出した部分を黒変部とし、該黒変部の画素数の前記切り出した節の部分の画素数に対する割合が大きいものを死節と決定する。
(もっと読む)
顔画像処理方法および顔画像処理装置
【課題】形状補間比率を連続的に変えて複数の顔画像を合成する場合、顔の特徴的な部分の位置が動くのを防止するとともに、合成後の顔画像を、部品単位でいずれかの顔画像に似せることを可能とし、また、簡単な計算量で顔の表情を変化させることを可能とする。
【解決手段】顔画像G1を背景となる顔画像G3に大まかに整合する第1の形状整合処理部11および顔画像G2を背景となる前記顔画像G3に大まかに整合させる第2の形状整合処理部12と、前記顔画像G1,G2のそれぞれの整合後の形状モデルおよび前記顔画像G3の形状モデルのそれぞれ対応する点の座標値を所定の比率で形状補間する形状補間処理部1と、この形状補間処理部1にて形状補間された形状モデルに対し、それぞれ対応する画素について所定の比率で色補間する色補間処理部2を設けた構成とする。
(もっと読む)
図形認識方法及び装置及びプログラム
【課題】 画像の輪郭を正しい曲線形状で表現する。
【解決手段】 本発明は、輪郭を入力し、非線形平滑化を行い、折れ線近似を行い、曲線区間を作成する。全ての曲線区間について割り当て候補を生成し、全ての割り当て候補の要素について曲線パラメータを推定し、その結果に基づいて全ての割り当て候補の適応度を計算し、全ての曲線区間について隣接区間と重複のない割り当て候補を選択し、図形情報として出力する。
(もっと読む)
画像処理装置,画像処理方法,およびコンピュータプログラム。
【課題】 静止画像又は映像等の画像の情報量をそのままに,特徴領域に該当する画像について変形処理を施すことが可能な画像処理装置,画像処理方法,およびコンピュータプログラムを提供する。
【解決手段】 上記画像処理装置(101)は,1又は2フレーム以上の原画像の画像領域から特徴領域を抽出する抽出部(209,809)と;上記特徴領域を基にして原画像に対して変形処理を施す画像変形部(211,811)とを備えている。
(もっと読む)
信号処理方法及び信号処理装置
【課題】 直交変換を用いた解像度変換において、拡大時の周波数特性を改善(有意な擬似高周波成分を付加する)することにより、精細度を向上させて高画質化を図ることの出来る信号処理方法及び信号処理装置を提供する。
【解決手段】 入力信号の周波数特性を近似式で近似し、この近似式を用いて擬似的な高周波成分を生成して高周波領域側に付加することにより拡大画像を得ることを特徴とする。
(もっと読む)
顔判別方法および装置並びにプログラム
【課題】画像のコントラストを正規化した後、画像上の輝度分布に係る特徴量に基づいて当該画像が顔画像であるか否かを判別する処理において、画像上の顔への重畳物、斜光、顔以外の背景による濃淡のばらつき等の影響による判別精度の低下を抑制する。
【解決手段】正規化処理を、当該判別対象画像における各局所領域について画素値の分散の程度が所定レベルに近づくように画素値の階調変換を行う処理とし、その局所領域を、判別すべき顔の目が1つのみ含まれる大きさの領域とする。顔であることを特徴付ける目や鼻等の顔の構成部品内でのコントラストの変化を抑えつつ、顔以外のものによる濃淡変化の影響を受け難い安定した正規化が可能となる。
(もっと読む)
車両、画像処理システム、画像処理方法、及び画像処理プログラム
【課題】レーンマークの認識制度を向上させ得る画像処理システム等を提供する。
【解決手段】本発明の画像処理システムによれば、路面画像の各画素の輝度に基づき、第1処理手段110によってレーンマーク候補が認識される。また、レーンマーク候補のエッジの連続性を表す第1指数と、レーンマーク候補の幅とレーンマークの規格幅との整合性を表す第2指数と、レーンマーク候補に含まれる画素の輝度の一様性を表す第3指数とが評価される。そして、第1、第2及び第3指数に基づき、第2処理手段120によって真のレーンマークに該当する可能性が最も高いレーンマーク候補がレーンマークとして認識される。
(もっと読む)
画像処理装置
【課題】 白線検出結果の信頼度合いを正確に把握すること。
【解決手段】 エッジ強度の距離分布における最大のエッジ強度(MAX)を基準としてエッジ強度の閾値を設定し、エッジ強度の距離分布において、エッジ強度が閾値以下となる自車からの距離をエッジ検出距離として算出し、このエッジ検出距離の長さに応じて白線検出結果の信頼度合いを算出する。
(もっと読む)
電子透かし検出装置及びその方法並びに記憶媒体
【課題】印刷された透かし入り画像をカメラで撮影して透かし情報を抽出する際に、局所的な非線形の歪みが生じている場合でも、少ない計算コストで正しく透かし情報を検出すること。
【解決手段】電子透かし検出装置は、画像データを読み取る画像読み取り部と、前記画像データの形状を多角形で近似する画像形状近似部と、前記形状近似した画像の形状に基づいて透かし情報の埋め込み位置を推定する埋め込み位置推定部と、前記形状近似した画像の形状に基づいて検出フィルタを生成する検出フィルタ生成部と、前記埋め込み位置と前記検出フィルタに基づいて透かし情報を検出する透かし情報検出部とを備え、電子透かしの検出を行う。
(もっと読む)
オブジェクトのモザイク処理方法及びモザイク処理装置
【課題】本発明は、指定フレーム上の対象物に沿った形状をポリゴンで作成し一連の動きの中で後続フレーム上の対象物を自動的に抽出することを目的とした、信頼性の高いトラッキング機能を具備したマスク処理システムを提供する。
【解決手段】最初のフレーム上にトラッキング対象のオブジェクト領域をユーザが指定し、後続フレームに対しては指定領域(オブジェクト)をトラッキングして後続フレーム上でのその位置を定め、得られた指定領域の新しい位置を基にし、さらに次のフレームに対してトラッキングにより指定領域(オブジェクト)の位置が定められ、このトラッキング処理が後続フレームに対して連続的に実行され、このようにして得られた各フレーム上のオブジェクトに対して指定されたマスク処理を施すことを特徴とするオブジェクトのモザイク処理方法である。
(もっと読む)
コンピュータ断層撮影アンジオグラフィにおける領域描写方法及び装置
コンピュータ断層撮影における心臓の対象領域の半自動抽出及び描写が時間を要し、熟達したオペレータを必要とする。本発明に従って、胸壁及びCROIが胸壁に付着した領域が検出される、CROIの完全自動抽出及び描写が提供される。次いで、下行大動脈が検出される。その後、CROIの一部の周りの閉曲線の円形初期設定が実行され、その閉曲線は次の段階において最適化される。次いで、前のスライス画像の前の曲線が実際のスライス画像における実際の曲線の最適化のために用いられる、CTA画像のスライス全てに亘る伝搬が実行される。有利なことに、CORIの完全自動抽出及び描写が非常に短い時間内に与えられる。 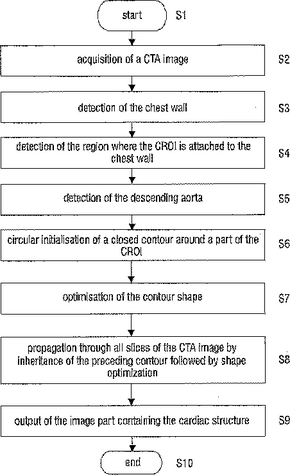 (もっと読む)
(もっと読む)
画像処理装置及び画像処理方法
【課題】 簡単な構成でコストをかけずに、かつ600dpiと1200dpiとの両方の解像度に対して共通に、画像形成手法によって発生するジャギーを改善する。
【解決手段】 第1の画像データに対して擬似中間調処理が施された第2の画像データ、及び第1の画像データに含まれる各画素の属性を表す属性データに基づいて、第2の画像データにおけるジャギーを改善すべく、属性データに基づいて、スムージング処理を行うか否かを示す判定信号を生成し、再生部524で判定信号に応じたスムージング処理を行って、第1の画像データから2値画像データを生成し、セレクタ503で第2の画像データの画素信号と、生成された2値画像データの画素信号とを比較して、より濃度の高い画素信号を出力する。
(もっと読む)
直線検出装置、直線検出方法およびそのプログラム
【課題】 直線上の点のばらつきが大きい場合でも直線を検出することができるようにする。
【解決手段】 画像データから実空間における直線上の候補点を検出し、候補点の座標値をハフ空間に投影して、ハフ空間上の曲線LSを求める。ハフ空間内を所定の大きさで区分けした小区間ΔDを複数まとめた検出区間Mを複数設定し、各検出区間M内を通過する曲線LSの数をカウントして、検出区間M内を通過する曲線LSの数が第1の閾値を越えた検出区間M内のいずれかの小区間ΔDの座標値を用いて、実空間上の直線を求める。
(もっと読む)
壁厚の計算
管腔境界または外側管壁境界の周界に沿った任意の点で管壁厚を自動測定するための方法。この方法はドローネー三角形分割およびマルチレゾルーションタイリングを使用する。ドローネー三角形分割のMaxMin角度特性を使用して、厚さを計算するための最小エネルギー関数を定義する。マルチレゾルーションタイリングを使用して、MaxMin角度補助定理を決定することができる。この三角形分割のMaxMin角度補助定理は、三角形分割の角度に基づいて最小エネルギー関数を定義することを可能にし、安定かつ一貫性のある幾何学計算を提供する。追加の形態学的指標を評価して脈管の形態の総合的な数量化を達成することができる。例えば壁厚に基づいて、管壁の様々な部分の様々なタイプの斑形態を区別する一組の脈管形状記述子を生み出すことができる。 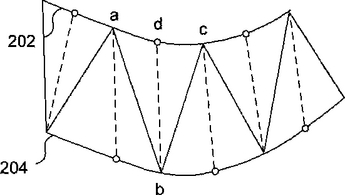 (もっと読む)
(もっと読む)
眼底画像の解析方法及び眼底画像解析装置
【課題】 医師による眼底の所見や診断を支援することのできる眼底画像析方法及びその装置を提供する。
【解決手段】 眼底画像から視神経乳頭部の検出解析を行う眼底画像の解析方法において、眼底画像におけるディスクラインを決定する第1ステップと、眼底画像におけるカップ縁を決定する第2ステップと、第1ステップ及び第2ステップにて決定したディスクライン及びカップ縁よりC/D比を求める第3ステップと、第3ステップにより求めたC/D比を予め用意されているC/D比データベースの情報と比較し,得られた比較結果を報知する第4ステップと、を備えることを特徴とする。
(もっと読む)
動的灌流画像法に基づく灌流診断法およびそのシステム
医療用画像システム(100)を提案する。本システムは、記録されている入力画像シークエンスを提供する手段(203−212)と、少なくとも1つの視覚化値を有する入力画像の、対応するセットのシークエンスのそれぞれを、時間に関するモデル関数と関係づける手段(214−218)と、さらに別の瞬間におけるコンピュータ画像のシークエンスを生成する手段(225−233、705−740)と、を有する。該入力画像はそれぞれ、造影剤が灌流される身体部位の、対応する瞬間におけるデジタル表現である。各入力画像は、複数の視覚化値を備える。各視覚化値は、身体部位の対応する部分を表す。各コンピュータ画像は、さらに別の複数の視覚化値を有する。それら視覚化値はそれぞれ、上記対応するさらに別の瞬間における、関連付けられたモデル関数より求める瞬時的な関数値から求められる。そしてこのコンピュータ画像のシークエンスを表示する。  (もっと読む)
(もっと読む)
341 - 360 / 435
[ Back to top ]