
Fターム[5B057DB02]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 二次元 (11,838)
Fターム[5B057DB02]に分類される特許
161 - 180 / 11,838
画像処理装置、画像処理方法
【課題】波長帯の異なる領域を抽出するための閾値を自動的に決定する。
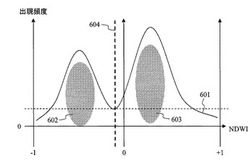
【解決手段】高空から撮影した地理画像データにおける画素において、第1の波長帯の分光輝度値と、記第1の波長帯とは異なる第2の波長帯の分光輝度値と、に基づいて画素を識別するための正規化指標値を演算する正規化指標演算部と、各画素における前記正規化指標値と出現頻度との関係を求め、クラス内分散とクラス間分散の比である分離度が最大となる正規化指標値を判別分析法により求め、前記画素を識別するための閾値として決定する閾値決定部と、前記閾値と対応する正規化指標値に基づいて、前記第1及び第2の波長帯により区別される画像データの領域を抽出する領域抽出部と、を有することを特徴とする画像処理装置。
(もっと読む)
車線監視システム及び車線監視方法

【課題】走行中の車線がカーブしている車線であるか否かを簡易な構成において判定可能な「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線上の各位置における白線の方向の、自動車側方位置における白線の方向に対する方向差Δiを、自動車から当該白線上の位置までの、自動車側方位置における白線の方向の距離cxiと共に求める。複数の画像フレームについて求めたQi :(cxi, Δi)を合成し、各Qiを取る直線Δ=mx+uを近似的に求め、直線の傾きが大きい場合には、走行中の車線がカーブしている車線であると判定する。
(もっと読む)
車線監視システム及び車線監視方法
【課題】走行中の車線がカーブしている車線であるか否かの判定や、カーブしている車線境界線の認識を、簡易な構成において実現できる「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線上の各位置における白線の方向の垂線の傾きを用いて、後方の白線を近似する円の半径を、車線の曲率半径rを算出し、曲率半径rが所定値より大きい場合には、走行中の車線がカーブしている車線であると判定し、白線を円で近似し、他の場合には、走行中の車線が直進している車線であると判定し、白線を直線で近似する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
物体数計測装置、物体数計測方法及び物体数計測プログラム
【課題】屋内・屋外に設置された単眼の監視カメラあるいは定点カメラを使って、撮影範囲内の物体数を物体が少ない場合でも精度よく計測することができる物体数計測装置を提供する。
【解決手段】画像中の物体の数を計測する物体数計測装置であって、画像の各画素の物体の数に対する寄与率を示す荷重値が定義された荷重値テーブルを記憶するテーブル記憶手段と、画像から物体が存在する領域を示す前景領域を抽出する前景抽出手段と、前景領域中の空間的に連続する部分前景領域を生成する部分前景領域生成手段と、生成された部分前景領域のそれぞれに含まれる各画素と荷重値テーブルから得られる当該画素の荷重値から物体の数を算出する部分物体数算出手段と、算出された各部分物体数から画像全体の物体数を算出する全体物体数算出手段とを備える。
(もっと読む)
画像処理装置
【課題】焦点距離に関する情報がなくても、幾何学的歪みの補正を適切に行う画像処理装置を提供する。
【解決手段】画像処理装置1は、撮像文書画像における水平方向の消失点の位置および垂直方向の消失点の位置を示す消失点情報を生成する消失点情報推定部14と、撮像文書画像におけるコーナーを検出するコーナー検出部15と、水平方向の消失点の位置に集まる2つの線分を上辺および下辺とし、垂直方向の消失点の位置に集まる2つの線分を左辺および右辺とし、検出されたコーナーを囲む四角形の輪郭を輪郭四角形として決定する輪郭決定部16と、輪郭四角形に基づいて、幾何学的補正後の第1画像サイズを決定する画像サイズ決定部19と、上記輪郭四角形と上記第1画像サイズとに基づいた第1補正方法により撮像文書画像に対して幾何学的補正を行う補正処理部20とを備えている。
(もっと読む)
情報処理装置
【課題】撮像された対象物に対応する商品の確定を簡便化して、より効率的に行うことが可能な情報処理装置及びプログラムを提供する。
【解決手段】実施形態の情報処理装置は、取込手段と、報知手段とを備える。取込手段は、撮像手段が撮像した画像を取り込む。報知手段は、前記撮像手段で撮像された物体の画像と、各商品の基準画像とがどの程度類似しているかを示す類似度が、前記撮像された商品を前記基準画像に対応する商品のうち一の商品として確定する条件を満たした場合に、前記撮像された商品が前記条件を満たした前記基準画像に対応する商品として確定されたことを報知する。
(もっと読む)
キャリブレーションシステム、パラメータ取得装置、標識体、及び、パラメータ取得方法
【課題】設置パラメータを取得する精度を向上する。
【解決手段】キャリブレーションシステム10においては、第1標識体31〜34が、カメラ5で取得された画像中において略真円の像として表れる略楕円のマークMi,Meを含んでいる。車載装置2は、このようなマークMi,Meの略真円の像を含む画像をディスプレイに表示させ、ユーザはこの略真円の像の位置を指定する。そして、車載装置2は、指定されたマークMi,Meの像の位置に基づいて設置パラメータを導出する。マークMi,Meの略真円の像を含む画像が表示されるため、ユーザはマークMi,Meの像の位置を正確に指定することができる。このため、設置パラメータを取得する精度を向上できる。
(もっと読む)
撮像装置、撮像方法、およびプログラム
【課題】HDR効果と特殊効果の双方の効果が適切に付加された画像を生成することが可能な撮像装置、撮像方法、およびプログラムを提供する。
【解決手段】異なる露出条件で複数の画像データを取得し(S61〜S65)、複数の画像データの少なくとも1枚の画像データに対して合成前処理を行い(S81)、複数の画像データを合成しダイナミックレンジを広げたHDR画像データを生成し(S87)、HDR画像データに対して特殊効果を適用する(S89)。
(もっと読む)
画像処理装置及びプログラム
【課題】 軽微な演算量で画質劣化の少ない解像度変換を実行できる画像処理装置を提供する。
【解決手段】 入力画像毎に、出力画像となる領域と倍率を指定して解像度変換を行う画像処理装置に関する。この画像処理装置は、入力画像を、いずれかの固定倍率で高解像化可能な高解像化変換部と、高解像化で得られた中間画像を保持する中間画像記憶部と、中間画像を参照して解像度変換を施して出力画像を得る解像度変換部と、前記固定倍率の中から指定倍率に近い倍率を選択すると共に、選択倍率及び指定領域とに基づいて、高解像化変換処理の対象領域を算出して高解像化変換部を制御する高解像化制御部と、選択倍率と指定倍率との比を中間画像を出力画像に変換する際の倍率とすると共に、中間画像を出力画像に変換する際に必要となる基準的な位置情報である変換パラメータを算出して解像度変換部を制御する解像度変換制御部とを有する。
(もっと読む)
ハーフトーン処理装置、ハーフトーン処理方法及びプログラム
【課題】出力解像度が高く、孤立ドットを正確に出力できない場合、ドットの集中により画質の安定化を図る中間調表現の処理では、メモリが増大してしまう。
【解決手段】量子化処理装置は、注目画素及び当該注目画素と副走査方向に隣り合う画素を少なくとも含む注目画素群に含まれた複数の画素の夫々に対して量子化処理する量子化処理手段と、前記量子化処理の結果から求められる量子化誤差を、前記注目画素群の近傍に位置する画素群における複数の画素に拡散する拡散手段とを備えることを特徴とする。
(もっと読む)
画像補正装置、画像補正方法及び内視鏡装置
【課題】ファイババンドルにより構成されたファイバスコープの画像における網目模様を、ファイバスコープの種類によらない汎用性を有し、かつ画像の情報を劣化を最小限に抑えることが可能な画像補正装置及び画像補正方法を提供する。
【解決手段】本発明の画像補正方法は、ファイババンドルを伝搬してきた網目模様を含む入力画像に対し、デジタルフィルタ演算を用いた平滑化によるぼかし処理を行うことで前記網目模様を低減し、前記ぼかし処理を行ったぼかし画像に対し輪郭強調処理を行うことで、前記入力画像に写っている被写体の前記ぼかし処理によりぼかされた輪郭を強調させる、ステップを含む。
(もっと読む)
吸収性物品に係るシール部の検査装置、及び検査方法
【課題】生理用ナプキン等の吸収性物品に係るシール部の穴あき異常や接合異常を正確に検査可能な検査装置及び検査方法を提供する。
【解決手段】吸収性物品の外縁部において接合するシール部1Sの検査装置70である。前記シール部が形成された領域を撮像して平面画像データとして生成する撮像処理部と、平面画像における前記シール部の撮像部分のうちで、厚み方向に貫通状態の穴あき部分が撮像されている領域が含まれるように二値化処理を行う第1二値化処理部と、前記二値化画像において二値のうちの一方の値によって特定される画像に、接合異常部分が撮像されている領域が含まれるように二値化処理を行う第2二値化処理部と、前記第1二値化処理部で生成された二値化画像に基づいて、穴あき異常の有無の判定を行う第1異常判定処理部と、前記第2二値化処理部で生成された二値化画像に基づいて、接合異常の有無の判定を行う第2異常判定処理部と、を有する。
(もっと読む)
超音波診断システム及び方法
【課題】超音波映像から対象体の境界を自動で、且つ正確に検出することができる超音波診断システム及び方法を提供する。
【解決手段】超音波映像でエッジを検出してエッジ抽出境界候補モデルを形成し、エッジ抽出境界候補モデルに単純化演算を行って単純化境界候補モデルを形成し、単純化境界候補モデルに細線化演算を行って細線化境界候補モデルを形成し、エッジ抽出境界候補モデル、単純化境界候補モデル及び細線化境界候補モデルを用いて超音波映像から対象体の境界を検出する超音波診断システム及び方法を提供する。本発明によれば、超音波映像から対象体の境界を自動で検出することによって使用者の労力と時間を減少させることができ、使用者間で測定結果が相違することを防止できる。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術を実現する。
【解決手段】道路情報RDを取得する道路情報取得部23bと、地物が配置された道路区間である地物配置区間に推定自車位置EPが進入する前に、少なくとも道路情報RDに基づいて、地物配置区間内での自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部27と、地物情報FTと予測速度推移とに基づいて、地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部26と、画像認識処理において認識対象とする地物を認識率に基づき決定する認識対象決定部25と、を備える。
(もっと読む)
データ外挿方法、データ外挿装置、及びデータ外挿プログラム
【課題】 ブロックノイズを発生させることなく各種データを解析して外挿することができ、且つ、外挿後のデータを大幅に自然なものとすることができるデータ外挿装置を提供する。
【解決手段】 データ外挿装置は、処理対象となる元画像データを入力すると、その元画像データの2次元信号と、周波数f’及び初期位相φ’を用いた位相と振幅A’とによって表される正弦波モデル信号との差の二乗和が最小値になるような周波数f’、振幅A’、及び初期位相φ’を、非周期信号のフーリエ変換式のパラメータとして求め、画像データを再構成するために必要な所定本数のスペクトルを抽出し、抽出したスペクトルによって構成される画像データに対して任意の定数kを乗算して画像データのダイナミックレンジを拡張しながら画像データの外挿処理を行い、再構成画像データを求める。
(もっと読む)
土地利用状況申請システム
【課題】農地に赴かずに、画像が当該農地を撮影したもので、かつ、現在の状況であるかを確認する。
【解決手段】携帯電話端末2に、土地を撮影し撮影時刻情報T1を付加可能なデジタルカメラ21と、撮影位置情報Pを取得するGPS22と、画像と撮影時刻情報T1と撮影位置情報Pとを確認者側装置3に送信する申請タスク251とを備え、確認者側装置3に、土地の位置や形状などの地理空間情報Aと、地理空間情報Aの誤差範囲を示す地理空間誤差バッファΔAと、撮影時刻情報T1の誤差範囲を示す時刻誤差バッファΔTとを記憶した農地等情報蓄積部31と、画像と撮影時刻情報T1と撮影位置情報Pと、地理空間情報Aと地理空間誤差バッファΔAと時刻誤差バッファΔTとから、撮影位置情報Pが地理空間誤差バッファΔAの範囲内であり、かつ、撮影時刻情報T1が時刻誤差バッファΔTの範囲内であるか否かを判定する、判定タスク342とを備える。
(もっと読む)
ヘアカラーのシミュレーションシステム及び方法、コンピュータプログラム
【課題】染色対象者のアンダーカラーを反映した、適切な染色後のヘアカラーを表示できるようにする。
【解決手段】髪の染色後の顔画像を画面表示するヘアカラーのシミュレーションシステムは、髪の染色後の色空間の座標データを染色材料の種類ごとに記憶する記憶部と、染色対象者のアンダーカラーの種別と染色材料の種類とを入力可能な入力部(クライアント端末3)と、入力されたアンダーカラーの種別と、入力された染色材料の種類に対応する座標データとを用いて、その種類の染色材料で染色対象者の髪を染色した場合の色空間の推定座標値を求める制御部と、求められた推定座標値に対応する髪色の顔画像を画面表示する表示部(クライアント端末3)とを備える。
(もっと読む)
撮像システム、撮像装置および画像処理方法
【課題】 フレームレートを落とさずにワイドダイナミックレンジの画像を得るこのできる撮像システムを提供する。
【解決手段】 撮像装置1では、通常露光モードで撮像素子3の露光時間を制御し、撮像素子3の全撮像エリアについて全画素の一部を間引いて読出しを行う間引きモードで画像の読出しを制御することにより、全撮像エリアの間引き画像を得る。そして、全撮像エリアの間引き画像から、所定の指定エリアの部分の画像を切り出した通常露光間引き部分画像を取得する。また、短露光モードで撮像素子3の露光時間を制御し、撮像素子3の全撮像エリアのうち指定エリアの読出しを行う指定読出しモードで画像の読出しを制御することにより、短露光指定読出し部分画像を取得する。そして、通常露光間引き部分画像と短露光指定読出し部分画像とを合成する。
(もっと読む)
161 - 180 / 11,838
[ Back to top ]