
Fターム[5B057DB02]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 二次元 (11,838)
Fターム[5B057DB02]に分類される特許
101 - 120 / 11,838
内視鏡システム及び画像生成方法
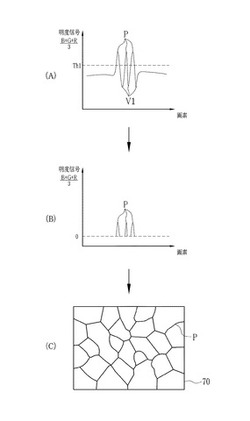
【課題】明るさを保った状態で、血管パターンや凹凸パターンを明瞭化する。
【解決手段】白色光で照明された被検体をカラーのCCDで撮像することにより、青色信号B、緑色信号G、赤色信号Rを得る。これら信号B,G,Rに基づいて、可視光領域の波長成分が含まれる通常光画像を生成する。信号B,G,Rに基づいて、被検体の平均的な明るさを示す明度信号((B+G+R)/3)を生成する。明度信号のうち一定の閾値Th1を超える画素領域をピットパターンなどの表層微細構造Pとして抽出する。表層微細構造Pが抽出された表層微細構造画像70と通常光画像を合成して微細構造強調画像を生成する。生成された微細構造・血管強調画像は、モニタに表示される。
(もっと読む)
エッジの検出と強調を行うイメージ処理の方法および装置

【課題】イメージ内のピクセルがスムージング・アルゴリズムを適用するべき均質な組織を表しているか否かを決定するための技術を提供する。
【解決手段】超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、エッジ検出値の大きさがスレッショルド値よりも大きい場合に、複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタを適用し、エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、選択された非方向性スムージング・フィルタを適用する。
(もっと読む)
検品装置、検品方法、検品システム、コンピュータプログラム
【課題】 リファレンス画像に基づき印刷した印刷物を検査する際に、印刷物を読み取った印刷画像とリファレンス画像との位置合わせを行うと、リファレンス画像によっては位置合わせの精度が低い場合があり、検査精度が低下する。
【解決手段】 リファレンス画像と印刷画像との位置合わせを行って印刷物の検査を行う処理、または、位置合わせを行わずに印刷物の検査を行う処理を、リファレンス画像の特性に基づいて選択する。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
不動産物件情報提供支援装置
【課題】ゲスト及びホストの音声に基づき、ゲストに提供しようとする不動産物件情報をより正確に検索できるようにする。
【解決手段】H/G判別部41は、異なる位置に着座するホストとゲストの音声を、集音方向を調整自在な指向性マイク22〜25による検出音の強度に基づき識別する。キーワードテーブル45には、質問キーワードと1つ以上の質問キーワードで分類される質問の種類毎の回答キーワードとが登録されている。キーワード判別部44は、識別されたホストの音声に、登録された質問キーワードのどれが含まれているか及び該質問キーワードに基づく質問の種類を判別し、識別されたゲストの音声に、直近の質問の種類に対応した、登録された回答キーワードのどれが含まれているかを判別し、判別した回答キーワードを該質問の種類と対応させて検索用キーワード記憶部46に記憶させる。
(もっと読む)
建物輪郭抽出装置、建物輪郭抽出方法及び建物輪郭抽出プログラム
【課題】空中写真画像及びDSMに基づく建物輪郭の抽出において、建物の周囲の環境は建物ごと、及び1つの建物の周りにおいても違いがある。
【解決手段】位置推定部20は、抽出対象領域における建物の概略位置に関し、DSMデータに基づいて、建物に応じた大きさの地上表層の凸部毎に、当該凸部を内包した位置推定領域を定める。領域分割部22は抽出対象領域を、それぞれ凸部領域より小さい領域であり、DSMデータから得られる高さと空中写真画像から得られるスペクトル情報とを含む属性が当該領域内で一様となる複数の小片領域に分割する。概略形状抽出部24は位置推定領域にて、属性が類似性を有する一群の小片領域を統合して建物の概略形状を抽出する。輪郭決定部26は概略形状に基づいて、多角形で表される建物輪郭を求める。
(もっと読む)
障害物検出装置及びプログラム
【課題】簡易な構成で、前方に存在する障害物を精度よく検出することができるようにする。
【解決手段】前照灯投光装置によって、光が照射される照射領域の上端部であるカットライン境界部分の明度が変化するように前方を照射する。撮像装置12によって、自車両の前方を撮像する。カットライン検出部20によって、撮像された画像から、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジ対を検出する。障害物検出部22によって、検出されたカットライン境界部分のエッジ対の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する。
(もっと読む)
油漏れ検出装置
【課題】簡易な構成で油漏れを検出可能な油漏れ検出装置を提供する。
【解決手段】撮像手段1で撮像した油漏れ検出対象領域のカラー画像の各画素における色情報に基づいて、各画素における色の予め定める特定色の強度を算出する画像解析部3と、画像解析部3によって算出された特定色の強度に基づいて、油の有無を判定する判定部5と、を備える。
(もっと読む)
画像処理装置、画像処理プログラム及び画像処理方法
【課題】鮮鋭且つ自然な画像を生成することを課題とする。
【解決手段】画像処理装置は、特徴量算出部と、生成部と、加算部とを有する。特徴量算出部は、所定範囲内での画素値の変化を表す特徴量を入力画像から算出する。生成部は、学習用画像の特徴量に対する高周波成分を含む学習用画像の特徴量の相対的な値の分布を表す確率分布と、特徴量算出部によって算出された特徴量とに基づいて、画素値の変化のパターンを表す所定画像パターンの重みを求め、求めた重みで該所定画像パターンを重み付けることにより、入力画像に対する高周波成分を生成する。加算部は、入力画像に、生成部によって生成された高周波成分を加算する。
(もっと読む)
細胞断面解析装置、細胞断面解析方法、及び細胞断面解析プログラム
【課題】細胞の断面形状を評価する。
【解決手段】細胞と液体とを含む系を第1の方向に移動させながら顕微鏡で焦点を合わせて観察し、鉛直方向の位置が異なる複数の合焦画像を、前記第1の方向と交差する第2の方向と前記第1の方向及び第2の方向と交差する第3の方向とにより画定される複数の2次元平面画像として撮像する撮像機構と、前記撮像機構により撮像された前記複数の合焦画像のそれぞれに対して画像を鮮鋭化する補正処理を行う画像補正部と、前記画像補正部により補正された後の前記複数の合焦画像に基づいて、前記2次元平面上の任意の点を通り、前記第2の方向又は前記第3の方向のいずれかの断面を、前記複数の合焦画像をつなぎ合わせるように再構成し疑似断面画像を生成する画像処理部と、を有することを特徴とする細胞断面解析装置。
(もっと読む)
注視位置推定システム、注視位置推定システムの制御方法、注視位置推定装置、注視位置推定装置の制御方法、プログラム、及び情報記憶媒体
【課題】虹彩中心位置を検出したり、眼球中心の投影位置を推定したりすることなく、ユーザの注視位置を推定することが可能な注視位置推定システムを提供すること。
【解決手段】撮影部17は、表示手段に表示される画面を見るユーザの顔を撮影する。領域検出部32は、ユーザの顔領域と、ユーザの目以外の所定部位領域と、の少なくとも一方と、ユーザの目領域と、を撮影部17の撮影画像から検出する。面積/位置情報取得部60は、目領域の面積情報及び位置情報と、顔領域と所定部位領域との少なくとも一方の面積情報及び位置情報と、を取得する。注視位置推定部62は、面積/位置情報取得部60によって取得された面積情報及び位置情報に基づいて、ユーザが注視している画面内の位置を推定する。
(もっと読む)
車両運転支援システム
【課題】無駄のない効率的なハフ投票を行い、走行車線検出の処理速度を上げることができる。
【解決手段】撮像部10によって撮像された画像から、テールランプ検出部32によって自車両の直前前方を走行している前方車両のテールランプを分光フィルタを介して検出する。そして、検出したテールランプの画像に基づいて前方車両の位置を検出する。白線検出部33によって、前方車両の位置に基づいて路面の走行車線の候補エッジを抽出し、抽出した候補エッジにハフ変換処理を施して走行車線を決定する。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム
【課題】時間的、空間的な連続性を保ちつつ、誤検出を低減しながらも個人が特定できないようにして人物領域を検出する。
【解決手段】処理対象画像と、直前の処理により生成された背景画像と、分散値画像に基づき、背景画像と処理対象画像の各画素値を分散値画像に応じた重み付け和により背景画像を更新するステップと、処理対象画像に対して荷重平均フィルタを使用し低周波数成分画像を生成するステップと、処理対象画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と処理対象画像との差異から人物領域候補を算出するステップと、高周波数成分画像の各画素の値を算出された人物領域候補の各画素の値を用いて抑制するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成し結果画像を生成するステップと、結果画像を処理結果として出力するステップとを有する。
(もっと読む)
監視システム
【課題】犯罪や事故、災害等の問題となるイベントが発生したときに、監視システムが問題となるイベントを自動的に解析して、利用者が携帯端末を介して、問題となるイベントをリアルタイムで監視可能な監視システムを提供すること。
【解決手段】本発明の監視システムにおいて、監視システムサーバの制御部は、通信部で画像データとイベントデータとを受信し、受信した画像データをエンコード部でエンコードし、動画ファイルを生成して、動画ファイル記憶部に格納し、受信したイベントデータまたは画像データをイベント解析部で基準値と比較して、イベントデータまたは画像データを異常値と判断した場合に、携帯端末にトリガー信号を送信し、携帯端末は、トリガー信号に応じて、監視システムサーバの動画ファイル記憶部に格納された動画ファイルを受信する。
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 代表色が過度に分割されているかどうかを簡易に判定する。
【解決手段】 色相環において設定した複数の領域と輝度方向に設定した複数の輝度レベルとに基づいて構成される複数の配列要素を定め、入力画像から各配列要素の頻度分布を作成する。当該作成した頻度分布に基づいて、前記色相環に設定された各領域において、当該各領域に属する配列要素の中から候補色の配列要素を選定する。そして、当該選定された配列要素の色情報及び頻度分布を、前記色相環で隣接する領域に属し且つ輝度レベルが同じ配列要素の色情報及び頻度分布と比較することにより、前記候補色の中から代表色を選定する。そして、入力画像の各画素の画素値を、選定された代表色に置き換える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 減色処理において、にじみが支配的になったヒストグラムから、簡易的に精度よく文字色を選択する。
【解決手段】 色相環において設定した複数の領域と輝度方向に設定した複数の輝度レベルとに基づいて構成される複数の階級を定め、入力画像から各階級の頻度分布を作成し、階級間の色相差が所定の閾値以上あるか否かを判定する。ここで、所定の閾値以上あると判定した場合は色相が最大の階級の色情報と色相が最小の階級の色情報とを代表色として選定する。一方、所定の閾値以上ないと判定した場合は、頻度分布が最大の階級の色情報と当該最大の階級から最も輝度差がある階級の色情報とを代表色として選定する。そして、入力画像に含まれる各画素値を選定された代表色に置換する。
(もっと読む)
撮像装置及び撮像方法
【課題】簡易な装置で被写体の移動速度を測定することができる撮像装置及び撮像方法を提供すること。
【解決手段】第1の被写体までの距離を、該第1の被写体の大きさに基づいて算出する測距手段と、移動している第2の被写体を所定の時間間隔で連続撮影して複数の静止画像を生成する静止画像生成手段と、前記複数の静止画像のそれぞれから、前記第2の被写体の当該静止画像内における位置を検出する位置検出手段と、前記第1の被写体までの距離、前記複数の静止画像のそれぞれで検出された前記第2の被写体の位置の差、及び前記所定の時間間隔に基づいて、前記第2の被写体の移動速度を算出する算出手段と、を備えることを特徴とする。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】360度のパノラマ画像を生成する場合に、高品質なパノラマ画像が得られるようにする。
【解決手段】投影画像生成部は、カメラを360度回転させながら撮影された撮影画像を円筒面上にマッピングすることで、投影画像を生成する。差分累積値算出部は、隣接する投影画像間の各位置における差分累積値を算出し、有向グラフ生成部は、投影画像と差分累積値とに基づいて、差分累積値がエッジのエネルギに反映された有向グラフを生成する。経路探索部は、有向グラフに基づいて、各投影画像を接続してパノラマ画像を生成するときに最も破綻が少ない投影画像の接続位置を検索し、パノラマ画像生成部は、その検索結果に基づいて投影画像を接続し、パノラマ画像を生成する。本技術は、画像処理装置に適用することができる。
(もっと読む)
固定部材検出ユニット、固定部材解体システム、固定部材解体方法、およびプログラム
【課題】解体対象を固定している固定部材の位置の検出精度を高めること。
【解決手段】解体対象を撮像した撮像画像から、前記解体対象を固定している固定部材の画像として予め決められている固定部材画像を検出する固定部材画像検出部と、前記固定部材画像検出部により検出された前記固定部材画像の位置を示す位置情報を算出する位置情報取得部と、前記解体対象を固定している複数の前記固定部材の予め決められた位置関係を示す配置パターンと前記位置情報とに基づき、前記固定部材画像検出部によって検出された前記固定部材画像が前記配置パターンに含まれる前記複数の固定部材に対応するか否かを判定する配置パターン対応確認部と、を備える。
(もっと読む)
101 - 120 / 11,838
[ Back to top ]