
Fターム[5B057DB02]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 二次元 (11,838)
Fターム[5B057DB02]に分類される特許
121 - 140 / 11,838
回転機ギャップ計測装置
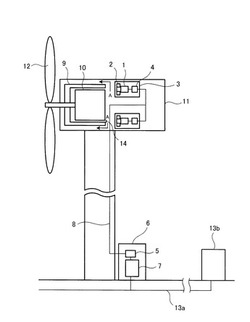
【課題】画像処理により直接的にギャップを計測し、また、異常を検出した場合の保守作業員の目視による確認作業の手間を省くことを可能とする。
【解決手段】カメラ1で、照明器具2により照らされた回転機のギャップ14を撮影し、撮影した画像データは画像伝送器4によって電気信号から光信号に変換され、光ケーブル8を通り情報装置盤6内の画像伝送器5に送信される。送信された光信号は、画像伝送器5において電気信号に再び変換され、画像伝送器5から画像解析装置7に送信される。画像解析装置7では画像伝送器5から送信されてきた画像データを基にギャップ14の計測を行い、計測した情報はネットワーク13a経由で遠隔地にある監視装置13bへ送信される。これによって、監視装置13bにより確認することができる。
(もっと読む)
評価値算出装置及び評価値算出方法

【課題】移動方向が互いにことなる複数の移動体をセンシング対象とする場合でも、センサ設置位置を精度良く評価できる評価値算出装置及び評価値算出方法を提供すること。
【解決手段】評価値算出装置100において、評価値算出部104は、設置位置候補と、センサの、センシング対象(ここでは、移動体)の移動パラメータに対する精度特性と、センサのセンシング対象領域(ここでは、監視対象領域)における交通事象パターンとに基づいて、センシング対象領域を構成する複数の領域要素にそれぞれ対応する複数の要素単位精度劣化値を算出する。そして、交通事象パターンは、複数の領域要素と各領域要素を起点とする交通事象ベクトルとから構成される。
(もっと読む)
車両の後側方障害物警報装置
【課題】運転者の死角となる自車両の後側方を監視し、他車両を検知した場合、運転者に警告する従来装置は、対象車両以外のガードレールや壁面、歩道上の歩行者などの誤検出があり、誤検出抑制の方法は何れも何らかの欠陥がある。
【解決手段】白線検知処理部が車載カメラの撮像画像を解析し、自車両左右の車線区分の白線を検知し、白線幾何位置計算処理部が白線と自車両間の位置関係、白線の曲率および自車両の左右方向移動速度を算出し、複数個の波動センサが送受信する波動を波動センサ処理部で制御し、波動センサ処理部で制御された波動センサの受信データを解析し、白線の有無、白線と自車両間の位置関係、白線の曲率、車両の左右方向への移動速度に基づき、検知レベルを制御して障害物の有無を検知する後側方車両検知処理部を備える。
(もっと読む)
勾配推定装置、勾配推定方法、及び勾配推定プログラム
【課題】路面が他の物体に覆われていても路面の勾配を算出することができる勾配推定装置、勾配推定方法、及び勾配推定プログラムを提供する。
【解決手段】特徴点抽出部は、撮影手段が撮影した画像上の特徴点を抽出し、物体検知部は、前記撮影手段が撮影した画像から物体を表す画像を検知し、勾配算出部は、物体検知部が検知した物体を表す画像における特徴点抽出部が抽出した特徴点の座標と、特徴点の座標の予め定められた時間における移動量と、に基づいて、物体が位置する路面の勾配を算出する。
(もっと読む)
到達時間推定装置、到達時間推定方法、到達時間推定プログラム、及び情報提示装置
【課題】到達時間をより確実に推定することができる到達時間推定装置、到達時間推定方法、到達時間推定プログラム及び情報提示装置を提供する。
【解決手段】画像入力部は、画像信号をフレーム毎に入力し、物体検知部は、画像入力部から入力された画像信号が表す物体を検知し、到達時間算出部は、物体検知部が検知した物体までの方向を表す方向ベクトルに基づいて前記画像信号を撮影した撮影装置の光軸の回転を表す回転行列を算出し、過去の方向ベクトルに前記算出した回転行列を乗じたベクトルと、現在の方向ベクトルとに基づいて前記物体までの距離の変化を算出し、算出した距離の変化に基づいて当該物体までの到達時間を算出する。
(もっと読む)
画像読取装置及びその画像読取方法
【課題】照明により撮影対象(例えば書籍など)の白飛現象の発生を防止し、かつ、撮影対象の端部のラインを適切に検出することができる画像読取装置及びその画像読取方法を提供する。
【解決手段】画像読取装置100は、撮影部101と原稿載置面(撮影面)との距離を変化させる方向に伸縮可能なアーム102と、アーム102に設けられて、撮影面に載置された書籍(撮像対象物)を斜め方向から照らす光源部105と、を備える。また、画像読取装置100は、光源部105が、書籍を斜め方向から照らして書籍の端部に影部分を発生させ、発生した影部分を含む撮影データを取り込むデータ取得部と、取り込んだ撮影データに基づいて、撮像対象物のエッジ特徴を検出するエッジ検出部と、を備える。エッジ検出部は、2値化データが、撮像対象物の端面のラインに、所定数以上、連続して発生した場合、エッジ特徴を検出する。
(もっと読む)
画像読取装置及びその画像読取方法
【課題】消費電力を削減しつつ、照明により白飛現象が発生しにくい画像読取装置及び画像読取装置の画像読取方法を提供する。
【解決手段】画像読取装置100は、撮影部101と原稿載置面(撮影面)との距離を変化させる方向に伸縮可能なアーム102と、アーム102に設けられて、撮影面を斜め方向から照らす光源部105と、を備える。MPUは、アーム102の長手方向に並んで設けられたLED105a〜105dのうち、[消灯範囲2]として照明範囲外を照らすLED105aを消灯する。また、MPUは、照明範囲の照度が所定以上の場合、[消灯範囲1]として照明範囲に近いLED105c,LED105dを消灯する。
(もっと読む)
双方向小売システム
【課題】購入可能な少なくとも1つの小売アイテムの少なくとも1つの画像が投入された仮想映写を特徴とするユーザーとの双方向環境を表示するように構成された双方向小売システムを提供する。
【解決手段】仮想映写上に、顧客を引き付けるために、購入可能な少なくとも1つの製品の少なくとも1つの画像を表示する工程で、該仮想映写が少なくとも1つの製品の少なくとも1つの画像を表示するための1つ以上の表示部を含む。仮想映写上で顧客とのショッピングセッションを開始する工程で、それにより顧客が、仮想映写に関連した1つ以上の製品にアクセスできる工程を更に含む。ショッピングセッションは二次装置に転送されて継続し、それにより少なくとも1つの製品の少なくとも1つの画像が、二次装置上でアクセスされる。該方法は、顧客が製品の画像のうちの1つ以上の特性をカスタマイズすることを許可するためにカスタマイズモードを開始する工程を含む。
(もっと読む)
画像処理装置
【課題】所望の色補正を容易に設定できる画像処理装置を提供する。
【解決手段】画素抽出部401は、補正対象の画像データから予め指定された色範囲に属する画素を抽出する。目標色選択受付部403は、目標色保持部402に格納された複数の目標色から、ユーザによる1の目標色の選択を受け付ける。色補正実施部404は、画素抽出部401により抽出された画素の色と目標色選択受付部403を通じて選択された目標色とに基づいて補正対象画像データに対して色補正を実施する。目標色抽出部406は、登録用画像保持部405に保持された、目標色登録用画像データから登録対象の目標色を抽出する。目標色登録部407は、目標色抽出部406により抽出された登録対象の目標色を予め指定された色範囲と対応づけて目標色保持部402に登録する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】編集前の色調整パラメータ及び編集中の色調整パラメータを適用することによって生成された画像データを比較し、所望の色調整パラメータを編集する。
【解決手段】画像処理装置は、色調整パラメータを編集する(S408)。画像処理装置は、撮像装置から画像データを受信し(S410)、編集前の色調整パラメータを画像データに適用して第1の画像データを生成するとともに、編集された色調整パラメータを画像データに対して適用して第2の画像データを生成する(S411)。画像処理装置は、第1の画像データ及び第2の画像データを表示手段において表示させる(S412)。
(もっと読む)
画像処理装置および画像形成装置
【課題】 モノクロ画像の画質の低下などを抑えつつ、カラー画像の配色を復元可能なモノクロ画像をカラー画像から生成する。
【解決手段】 変換テーブル生成部31は、カラー画像データの色分布を特定し、その色分布における複数の色領域と互いに異なる濃度を有する複数のグレー濃度値とを対応付ける変換テーブル41を生成し、色変換部32は、その変換テーブル41に従ってカラー画像データをグレースケール画像データへ変換する。また、色変換部32は、その変換テーブル41を読み出し、その変換テーブル41に従って、グレースケール画像データを元のカラー画像データへ変換する。
(もっと読む)
画像読取装置、画像形成装置、画像処理方法
【課題】原稿から読み取った画像データにおける低周波画像領域のS/Nを向上させると共に、高周波画像領域の画質の劣化を防止することのできる画像読取装置、画像形成装置、及び画像処理方法を提供すること。
【解決手段】副走査方向のライン数が出力解像度に対応する副走査方向のライン数の2倍である画像データを読み取り、奇数ラインの画像データで構成される第1画像データと偶数ラインの画像データで構成される第2画像データとを生成し(S2、S3)、その第1画像データ及び第2画像データにおける同一位置の画像データを予め設定された領域ごとに比較する(S4〜S5)。そして、画像データの差異が予め設定された閾値未満の領域には第1画像データ及び第2画像データを平均化した画像データを用い(S7)、画像データの差異が前記閾値以上の領域には第1画像データ又は第2画像データを用いて(S6)、第3画像データを生成する。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】撮影画像を絵画調画像に変換する場合、撮影画像としての適度なリアリティと絵画としての趣との双方を備えた画像の生成を可能とする。
【解決手段】撮影画像である元画像データを絵画変換し、第1の絵画調画像データを生成する。元画像データを第1の絵画調画像データに確保した画調に応じた透過率で第1の絵画調画像データに透過合成し、第2の絵画調画像データを生成する。第1の絵画調画像データへの透過合成に先立ち、元画像データにおいて顔検出を行う。顔が検出できた場合には、元画像データにおける顔領域の透過率を顔領域以外の背景領域の透過率よりも低めに設定して元画像データを第1の絵画調画像データに透過合成する。第2の絵画調画像データとして、第1の絵画調画像データに比べて細部のつぶれが目立たず、かつ無用な刷毛目や色調が現れる度合が減少した画像データが得られる。
(もっと読む)
画像処理装置
【課題】ハードウェアの規模の拡大を抑えて、ハードウェアによる色変換処理の高速化を図る。
【解決手段】画像処理装置は、1ブロックを複数段階で分割し、分割段階の順に分割されたサブブロック単位で各画素にアドレスを割り当てる入力バッファー11と、アドレス順に色変換処理する色変換部12と、最後の分割段階のサブブロック内の画素間で画素値を比較するとともに、各サブブロック内でアドレスが先頭の1画素を用いて、同じ分割段階で分割されたサブブロック間の画素値を比較する比較部Mbと、最後の分割段階のサブブロック内の画素間で画素値が一致し、何れかの分割段階のサブブロック間で画素値が一致する場合、当該サブブロック間で最初に色変換処理された画素の色変換処理後の画素値を、各サブブロックの画素にコピーして記憶する出力バッファー13と、を備える。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】撮影画像を絵画調画像に変換する場合、撮影画像としての適度なリアリティと絵画としての趣との双方を備えた画像の生成を可能とする。
【解決手段】撮影画像である元画像データG1を絵画変換し、第1の絵画調画像データG2を生成する。元画像データG1からモノクロ画像データG3を生成し、顔検出で検出した顔領域以外の背景領域をぼかした背景ぼけ画像G4を生成する。背景ぼけ画像G4から、各画素の輝度に応じた透過率を画素毎に設定したα混合データG5等の半透明画像を生成し、半透明画像を第1の絵画調画像データG2に透過合成することによって第2の絵画調画像データG6を生成する。第2の絵画調画像データG6として、第1の絵画調画像データに比べて細部のつぶれが目立たず、かつ無用な刷毛目や色調が現れる度合が減少した画像データが得られる。
(もっと読む)
画像処理装置の動作方法および画像処理装置
【課題】成功もしくは失敗した画像伝送の信頼性のある識別を可能にし、従ってフリーズ画像の識別を可能にする。
【解決手段】ノイズ信号を重畳された画像信号が送信装置2と少なくとも1つの受信装置3との間でディジタル伝送され、その画像信号が、画像内容とその画像内容に重畳されたノイズ信号のノイズパターンとをそれぞれ含んだ時間的に連続する複数の画像を有する画像処理装置1を動作させる方法において、伝送後に、画像信号の少なくとも2つの連続する画像が少なくとも領域ごとに互いに比較され、画像に含まれるノイズパターン間に相違が存在する場合に、それらの画像の画像内容が同一である際にも、成功した伝送画像であることが認識される。
(もっと読む)
シミ検出方法、シミ検出装置およびシミ検出プログラム、並びに、シミ分類方法、シミ分類装置およびシミ分類プログラム
【課題】シミの検出を高速度に行うことができるシミ検出方法を提供する。
【解決手段】被験者の所定の皮膚領域を撮影して得られた撮影画像の色空間を変換すると共に変換された撮影画像の色空間のうち所定の色空間成分からなる色空間成分画像を生成し、色空間成分画像を多重解像度処理することにより、解像度の異なる複数の色空間成分解像度変換画像を生成し、生成された複数の色空間成分解像度変換画像をそれぞれ2値化処理することにより、所定の皮膚領域内に存在するシミを検出する。
(もっと読む)
シミ分類方法、シミ分類装置およびシミ分類プログラム
【課題】シミを高精度に分類することができるシミ分類方法を提供する。
【解決手段】被験者の皮膚を撮影して得られた画像の色空間を変換した色空間変換画像を生成し、色空間変換画像に含まれるシミを検出し、検出されたシミについて、形態特徴量および色特徴量を算出し、算出された形態特徴量および色特徴量に基づいて、機械学習法によりシミを分類する。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
表面検査方法
【課題】車両用部品の表面検査において、検査時間の短縮と検査精度の向上を図る。
【解決手段】車両用部品20の表面に設定される第1領域を1つの画素で検出する第1画像取得手段によって取得する第1画像取得工程と、取得した第1画像の第1領域の欠陥強度が所定の閾値以上の場合に第1領域を各欠陥検出領域351と設定する欠陥領域設定工程と、第2領域41−49を1の画素で検出する第2画像検出手段によって欠陥検出領域351と欠陥検出領域351の周辺を含む欠陥判定領域40の複数の第2領域41−49の画像を取得する第2画像取得工程と、各第2領域の欠陥強度が所定の閾値以上と判定された各第2領域41−49の欠陥強度の平均値を計算し、平均値が欠陥強度の所定の閾値以上である場合、その車両用部品は欠陥品であると判断する欠陥品判断工程と、を有する。
(もっと読む)
121 - 140 / 11,838
[ Back to top ]