
Fターム[5B057DC08]の内容
Fターム[5B057DC08]に分類される特許
201 - 220 / 2,433
状態検知装置および状態検知方法
【課題】簡易な構成により、対象者の状態を高い精度で検知可能な状態検知装置および状態検知方法を提供する。
【解決手段】ベッド上の対象者を撮像した画像を解析することにより、前記対象者の移動方向を検出する画像処理部12と、前記画像処理部によって検出された移動方向と前記対象者の過去の状態とに基づいて、前記対象者の現在の状態を判別する判別部13と、前記判別部によって得られた前記対象者の現在の状態を示す情報を出力する出力部14とを有する。また、ベッド上の対象者を撮像した画像の入力を受け、前記画像を解析することにより、前記対象者の移動方向を検出し、前記検出された移動方向と前記対象者の過去の状態とに基づいて、前記対象者の現在の状態を判別し、前記判別によって得られた前記対象者の現在の状態を示す情報を出力する。
(もっと読む)
物体検出装置、および、物体検出方法

【課題】撮影画像中の物体の物体像を確実に検出することを目的とする技術に関する。
【解決手段】
撮影画像に基づいて、カメラの光軸の実際の方向を示す情報を導出し、カメラの光軸の基準の方向を示す情報とカメラの光軸の実際の方向を示す情報との差に応じて、撮影画像中において検出領域とする範囲を変更する。これにより、物体の物体像の検出領域を撮影画像中の適正な範囲に設定でき、検出対象とすべき物体の物体像を確実に検出できる。
(もっと読む)
画像処理装置および画像処理システム
【課題】撮像装置に対する撮像指示を発生してから実際に撮像が行われるまでにタイムラグが存在する場合であっても、正確にトラッキング処理を行うことのできる視覚センサを提供する。
【解決手段】画像処理装置は、搬送装置の搬送経路における移動量を示す信号を受付けるインターフェイスと、搬送経路において撮像部の撮像範囲より下流側に配置されるとともにワークを取り扱う移動機械、を制御するための制御装置と通信するためのインターフェイスと、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する手段と、制御装置との間で搬送経路における移動量を同期して保持する手段と、撮像指示に応答して撮像部による撮像を開始する手段と、位置情報と当該位置情報の取得に用いた画像を撮像したときの移動量とを制御装置へ送信する手段とを含む。
(もっと読む)
画像処理装置、画像表示システム及び画像処理方法
【課題】不要な指標の表示を防止する。
【解決手段】画像表示システム10では、物体検出部22aが、撮影画像中の検出領域に存在する物体データを検出する物体検出処理を周期的に実行する。また、対応判定部22bが、直近の物体検出処理で検出された物体データと、管理テーブル24bに登録された過去の物体検出処理で抽出された物体データとを対応付ける対応判定処理を実行する。そして、第1削除部22cが、対応付けできない回数が所定条件を満足する物体データを管理テーブル24bから削除する。さらに、第2削除部22dが、検出領域DAの外縁に到達した物体データを、管理テーブル24bから削除する。そして、枠重畳部22eが、管理テーブル24bに登録されている物体データの位置を示す強調枠を撮影画像に重畳する。したがって、検出領域の外縁に到達した物体データの強調枠が表示されない。
(もっと読む)
環境認識装置
【課題】信号機の矢印信号を的確に認識することが可能で、しかも、信号機が自車両から遠い位置にある段階から矢印信号を認識することが可能な環境認識装置を提供する。
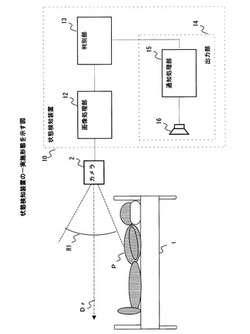
【解決手段】環境認識装置1は、撮像手段2が撮像した画像Tに基づいて信号機Sの赤信号Lr等を検出する赤信号等検出手段12と、検出された赤信号Lr等の画像T中の位置に基づいて設定した探索領域Rs内に撮像されている矢印信号Aを抽出する矢印信号抽出手段13とを備え、矢印信号抽出手段13は、自車両MCから赤信号Lr等までの実空間上の距離Zに応じて矢印信号Aが指し示す方向を認識する手法を切り替え、自車両MCから遠い第一の所定区間Sec1内にある場合には画像T中における矢印信号Aと赤信号Lr等との相互の位置関係に基づいて矢印信号Aが指し示す方向を認識する。
(もっと読む)
視線検出装置および視線検出方法
【課題】視線検出装置の検出精度を容易に確認することができる技術を提供
【解決手段】まず運転者の視線を検出し(S20)、その後に、視線検出結果に基づいて、運転者の視線上にナビ表示画面が位置しているか否かを判断する(S60)。そして、運転者の視線上にナビ表示画面が位置している場合に(S60:YES)、ナビ表示画面上において運転者の視線とナビ表示画面とが交差する位置に、運転者の視線検出結果であることを示す視線位置指示画像を表示する(S70)。したがって、運転者がナビ表示画面を見ているときに、運転者の視線検出結果がナビ表示画面に表示される可能性が高い。そして、運転者がナビ表示画面を見ているときに視線位置指示画像が表示されると、運転者は、自身が現時点で実際に見ている表示画面上の位置と、視線位置指示画像が表示されている表示画面上の位置とを比較することができる。
(もっと読む)
読取装置
【課題】読み取り可能な範囲より大きい原稿から複数の領域画像を得て、該複数の領域画像を一枚の原稿画像に合成し、合成された原稿画像に空白部が出ることを防止可能な読取装置及び読取方法を提供する。
【解決手段】読取装置は、各領域に対して読み取りを行い、二番目以降に形成された各領域画像の、当該領域画像の直前に形成された領域画像に対する傾き度合いを、空白確率としてそれぞれ検出する傾き検出部と、各領域画像に対して、対応の傾き度合いが所定の基準度合いより大きいか否かを判定する傾き判定部と、傾き度合いが基準度合いより大きく、原稿画像に空白部が出てしまうと判定された場合、原稿のセット位置をユーザに修正させるための警告を出す警告部と、セット位置がユーザによって修正されると、再び読み取りを行わせ、最新の領域画像を含む各領域画像を合成して、一枚の原稿画像を形成する合成部とを備える。
(もっと読む)
撮像制御装置、テンプレート取得装置、及びプログラム
【課題】環境光を精度良く推定できる撮像制御装置及びプログラムを提供する。また、視点検出における成功率の個人差を少なくすることができるテンプレート取得装置及びプログラムを提供する。
【解決手段】制御装置70は、被写体を撮像する撮像部20の、奇数フィールドの撮像において光源10を発光させる。CPU71は、被写体に対する太陽光の方向を照明環境検知装置60の測定値に基づいて特定し、特定した太陽光の方向に基づき、光源10の発光時間を制御する。また、制御装置70のCPU71は、被写体である人物に対して、スピーカ50により複数回所定の指示を行い、指示ごとに撮像部20に撮像させ、撮像回数分の被写体画像を取得し、これらを比較することで、被写体画像における人物の特徴領域を検知し、特徴領域画像を取得する。CPU71は、特徴領域画像をテンプレートとして記憶手段に記憶させる。
(もっと読む)
表情判定プログラムおよび表情判定装置
【課題】表情判定に用いる特徴点を高速に検出することを課題とする。
【解決手段】表情判定装置200は、顔部位検出部221、設定部222、特徴点検出部223および判定部224を有する。顔部位検出部221は顔画像から複数の顔部位を検出する。設定部222は、複数の顔部位の少なくとも一つを用いて口領域処理範囲を設定する。特徴点検出部223は、口領域処理範囲の画素分布に基づいて右口角および左口角を含む口領域を決定し、口領域から右口角および左口角の位置を検出する。判定部224は、口領域の縦横比率、口領域の面積および口領域における右口角の位置および左口角の位置に応じたポイントを付与することで被験者の表情を判定する。
(もっと読む)
共焦点顕微鏡システム、画像処理方法および画像処理プログラム
【課題】観察対象物の表面の断面曲線を正確でかつ高速に検出することが可能な共焦点顕微鏡システム、画像処理方法および画像処理プログラムを提供する。
【解決手段】使用者が観察対象物Sの断面曲線データの取得範囲を指示する。CPU210は、その指示に基づいてX方向に沿って連続的に並ぶ複数の帯状領域を設定するとともに、各帯状領域においてX方向に平行な複数の測定ライン上でレーザ光を走査することにより、複数の測定ラインに基づく画素データを制御部300から取得する。CPU210は、取得した複数の測定ラインの画素データに基づいて帯状領域の複数の断面曲線データを生成し、作業用メモリ230に記憶する。CPU210は、複数の帯状領域の複数の測定ラインについて生成された断面曲線データをX方向に沿って連続する測定ラインごとに連結することにより、連結された複数の断面曲線データを得る。
(もっと読む)
画像処理装置、画素補間方法およびプログラム
【課題】 高精度な画素補間を実現できる装置および方法を提供する。
【解決手段】 この装置は、補間対象画素を含む画像領域が周期領域であるかを判定する周期性判定部30と、第一補間方法により画素値を生成する第一画素値生成部32と、第二補間方法により画素値を生成する第二画素値生成部33と、判定結果から第一画素値生成部32と第二画素値生成部33のどちらを用いるかを判断する制御部34と、決定された画素値生成部が生成した画素値を画像の対応画素へ挿入する画素値挿入部35と、その画素値生成部が生成した近傍画素の画素値へ画像内の当該近傍画素の画素値を更新する画素値更新部36とを含む。
(もっと読む)
画像処理装置、撮像装置およびプログラム
【課題】主要被写体を推定する。
【解決手段】画像処理装置であって、時系列で撮像された複数の画像を取得する画像取得部と、複数の画像に含まれる互いに異なる複数の被写体を抽出する被写体抽出部と、複数の被写体のそれぞれが、複数の画像のそれぞれにおいていずれの位置にあるかを判断し、複数の画像における複数の被写体それぞれの位置情報に基づいて、複数の被写体のいずれが、複数の被写体における主要被写体であるかを推定する主要被写体推定部とを備える。
(もっと読む)
顔検出装置および顔検出方法
【課題】処理時間の増加を抑制しつつ高精度な顔検出を行う。
【解決手段】顔検出装置100は、画像データを取得する画像取得部110と、取得された画像データのコントラストを調整する画質調整部114と、取得された画像データから顔を検出する顔検出部116と、検出された顔の位置を示す顔情報を保持する顔保持部120と、新たに取得された画像データにおいて、顔保持部に保持された顔情報に対応する顔があるか否かを判定する漏れ判定部122と、漏れ判定部が顔情報に対応する顔がないと判定すると、新たに取得された画像データのコントラストを変更するよう画質調整部114を制御する画質調整制御部124と、コントラストを変更した画像データについて、顔の再検出を行うよう顔検出部116を制御する顔検出制御部126と、検出された顔単位でコントラスト変更前後の論理和を導出する結果出力部118とを備える。
(もっと読む)
境界検出装置、および境界検出プログラム
【課題】車両が走行する走行領域の境界を検出する境界検出装置において、地図データのデータベースを必要としない簡素な構成で精度よく走行領域の境界を検出できるようにする。
【解決手段】車線境界検出装置においては、撮像画像を構成する各画素について、撮像画像の縦方向に隣接する画素間における輝度変化の大きさと横方向に隣接する画素間の輝度変化の大きさとを検出し、エッジ成分とエッジ方向とを演算する(S320,S330)。各エッジ成分について、予め設定された撮像画像中の無限遠点の位置とエッジ成分の位置とを結ぶ直線を表す仮想基準直線の方向に対するエッジ方向のなす角を演算し、このなす角が直角に近くなるにつれて重み付けが大きくなるように、各エッジ成分に対して重み付けを設定し(S350)、各エッジ成分に設定された重み付けを考慮して画像処理を行うことで、走行領域の境界の端部を検出する(S360)。
(もっと読む)
画像フレームを位置合わせする方法、スキャニング装置、およびコンピューター読み取り可能な媒体
【課題】文書上を手で動かされる小型スキャナーにおいて粗悪な画質およびスキャンされた複数部分の粗悪な位置合わせの改良された方法を提供すること。
【解決手段】2つの画像は2画像の画像データからの位置合わせエラーとともにセンサーのセットからの推定エラーからなるコスト関数の最小化により縫合される。コスト関数における重み関数は持ち上げおよびページ落ちを含むセンサーエラーとともにセンサー読み取り精度の尺度を考慮するセンサー推定の信頼値から引き出される。重みを用いてセンサー精度に対する画像位置合わせ精度を調節し2画像を最も良く縫合する位置合わせパラメーターのセットを作り出す。初期位置合わせパラメーターについて大きなエラーに対処し、最小化プロセスにおいて極小を避けるために、画像ペアをより低い解像度で位置合わせし、次により高い解像度において精緻化することができる。
(もっと読む)
3次元寸法測定装置
【課題】本発明の目的は、画像を用いた測定において、1枚の画像に納まりきらない程の高い倍率で画像を取得する際にも、容易な操作で画像を取得でき、かつ、寸法を算出する際に、1枚の画像に納まりきらない程の高い倍率で撮影した画像を用いることで、1枚の画像に納まりきる画像から寸法を算出するよりも高い精度で寸法を算出可能な装置を提供することにある。
【解決手段】本発明は、ワイドカメラの画像からワークの輪郭を抽出し、抽出された輪郭情報に基づき、駆動機構の走査軌跡および、複数のカメラの撮像倍率を決定し、決定された走査軌跡を走査中に、複数のカメラから複数枚の画像を取得し、複数枚の画像を合成して、高倍率の画像を生成し、生成された高倍率画像から高精度に輪郭の寸法を求めることを特徴とする。
(もっと読む)
画像表示装置、画像表示方法、及びプログラム
【課題】3D画像は、2D画像と比較して高い表現力を有するため今後の普及が期待される。しかし、その表現力と引き換えに3D画像を表現するためのデータ及び消費電力が増加する。
【解決手段】そこで、観察者が注目する領域の画像である注目領域画像信号を左右それぞれの視点から変換した画像と、背景画像とを合成することで、観察者が注目する領域のみを3D表示させ、注目度が低い領域を2D表示のままとする2D/3D混在表示を実現する。その結果、3D表現に必要なデータ量及び消費電力が低減できる。さらに、2D画像から観察者が注目する注目領域画像を自動生成することで、より簡便に2D/3D混在表示を実現する画像表示装置を提供する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】様々な角度の文字輪郭部に発生するジャギーを抑制することが可能な技術を提供する。
【解決手段】画像処理装置は、第1のスクリーン処理部33と第2のスクリーン処理部34と合成部35とを備える。第1のスクリーン処理部33は、文字の線領域に関して、第1のスクリーン角度による第1のスクリーン処理を実行する。第2のスクリーン処理部34は、文字の線領域のうち少なくとも輪郭領域に関して、第1のスクリーン角度とは異なる第2のスクリーン角度による第2のスクリーン処理を実行する。合成部35は、線領域のうち少なくとも輪郭領域に関して、第1のスクリーン処理による処理結果と第2のスクリーン処理による処理結果とを合成する。
(もっと読む)
一時停止線検出装置及びプログラム
【課題】一時停止線以外の白線の誤検出を防止して、一時停止線を精度良く検出する。
【解決手段】画素距離変換部20で、画像入力部18により取得した入力画像を2値化し、画素値を画素距離に変換した画素距離画像を生成する。交差パターン検出部22で、画素距離画像を用いてレーンマークを追跡して、レーンマークと水平方向に伸びる白線との交点を検出する。探索領域設定部24で、交点近傍領域を一時停止線を検出するための探索領域に設定し、一時停止線判定部26で、探索領域内の白線の芯線を抽出し、抽出された芯線が直線状かつ所定の長さ以上の場合に、芯線に対応する白線を一時停止線と判定する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】被写体を構成する層の正常構造を精度良く推定する仕組みを提供する。
【解決手段】被写体である眼部の眼底の断層画像から層を検出する層検出部221と、層検出部221で検出された層の形状に基づいて眼底の深さ方向に凸な曲線を求める正常構造推定部222と、層検出部221で検出された層と正常構造推定部222で求められた曲線との差異を定量化する定量化部223を具備する。
(もっと読む)
201 - 220 / 2,433
[ Back to top ]