
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
2,201 - 2,220 / 2,719
顕微鏡スライドの拡大イメージを作成するシステム及び方法
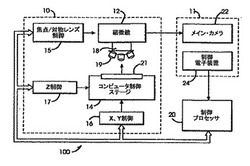
【課題】 最適なイメージ画質特性を有する仮想顕微鏡スライドを作成するシステム及び方法を提供すること。
【解決手段】 本発明による画像化システム(100)では、顕微鏡(12)のそれぞれの物理スライドに対して複数の領域を識別し、少なくとも2つの焦点z位置z1及びz2を定義する。物理スライドのそれぞれの領域は、第1のz位置において走査され、それぞれの定義された領域のデジタル・イメージの第1の集合を生じる。物理スライドのそれぞれの領域は、第2のz位置においても走査され、それぞれの定義された領域のデジタル・イメージの第2の集合を生じる。それぞれの集合のそれぞれのイメージは、その焦点画質計量が評価され、それぞれの領域に対して、当該領域に対応し、所望の焦点画質に対応する焦点画質計量を有する前記第1又は前記第2のいずれかのイメージが選択される。
(もっと読む)
画像解析装置、画像解析方法、及び画像解析処理のためのプログラム

【課題】背景に濃淡むらのある画像から2値化によって計測対象物の画像を画面全体に亘って抽出する。
【解決手段】画像処理部45は、原画像データを入力する入力部441と入力部441から供給された原画像データを構成する画素に対する輝度レベルを表す波形を水平方向に多項式近似した画像データを生成する多項式近似部442と、近似波形の輝度レベルが最大又は最小の画素を選択するフィルタ処理を行うフィルタ部443と、フィルタ処理された画像データを用いて原画像データを画像処理して検出対象物の画像データを抽出する差分演算部444とを備え、原画像データと該原画像データから背景画像を生成し、これらの差分演算により原画像における背景画像を除去して濃淡むらのある原画像から検出対象物の画像を抽出する画像解析を行っている。
(もっと読む)
超音波診断装置
【課題】 体内構造物が描出された超音波像の視認性を向上させるのにより好適な超音波診断装置を実現する。
【解決手段】 超音波診断装置は、探触子102と、超音波データ収集部104と、構造物画像構築部110を備え、構造物画像構築部110は、被検体に関するボリュームデータを生成し、ボリュームデータに対して設定された視線方向のボクセルのうち、最大輝度を有するボクセルのデータに基づき最大値投影画像310を生成し、最小輝度を有するボクセルのデータに基づき最小値投影画像314を生成し、最大値投影画像310上の指定点又は指定領域の輝度情報を基準とし、最小値投影画像314のうち前記指定点又は指定領域に対応する領域の輝度情報を基準輝度情報に近づけて補正し、補正後の輝度分布シフト後画像317と最大値投影画像310との差分画像を表示用超音波像として生成する。
(もっと読む)
物体判別装置、物体判別方法および物体判別プログラム
【課題】画像内の物体を判別する際の精度低下を防止することを課題とする。
【解決手段】この物体判別装置は、最終的な物体判別結果を導き出すための総合判別テーブルを所持する。そして、この総合判別テーブルを用いて最終的な物体判別結果を導き出すために、まず、画像内から判別の対象となる候補物体の検出を行う。次に、画像内から検出した候補物体の判別を行う。例えば、図1に示すように、パターンマッチング手法およびニューラルネットワーク手法からそれぞれ送信されてきた各判別結果がともに「所定の物体である」(例えば、「歩行者である」)とするものである場合には、総合判別テーブルに照らし合わせて、最終的に「所定の物体である」(例えば、「歩行者である」)とする総合判別結果を導き出す。
(もっと読む)
車載カメラシステム、オブジェクト位置検出システム、及びオブジェクト位置検出方法
【課題】障害物が一方のカメラの撮像範囲外に移動した場合に障害物までの距離を適切に算出することができるシステムを提供すること。
【解決手段】本発明に係る車載カメラシステムは、同一のオブジェクトを撮像する第1及び第2撮像部と、第1時刻に第1及び第2撮像部によって撮像された画像に基づいて、第1時刻でのオブジェクトまでの距離を算出する第1オブジェクト距離算出部と、第1時刻で第1及び第2撮像部の撮像範囲内に存在したオブジェクトが、第1時刻から所定時間後の第2時刻において第1撮像部の撮像範囲内で第2撮像部の撮像範囲外に移動すると、第1時刻と第2時刻に第1撮像部によって撮像された画像でのオブジェクト長の差を算出するオブジェクト長さ差算出部と、オブジェクト長の差及び第1オブジェクト距離算出部が算出した距離に基づいて第2時刻におけるオブジェクトまでの距離を算出する第2オブジェクト距離算出部とを備える。
(もっと読む)
2次元投影画像の画像評価方法およびこれに対応した対象物
【課題】投影画像自体に基づいて簡単に血管系の識別を可能にする。
【解決手段】投影画像Bに基づいて、複数のピクセル9を有する2次元の評価画像Aが求められ、評価画像Aのピクセル9が投影画像Bのピクセル9に対応し、評価画像Aの少なくとも部分範囲18において各ピクセルについて、互い相容れない複数の型の1つが求められてピクセル9に割付けられ、型が、評価画像Aのそれぞれのピクセル9によって決定される投影画像Bの2次元の型程度評価核19内にある投影画像Bのピクセル9のピクセル値の時間的経過に基づいて求められ、型「潅流のある周辺部分」を割付けた評価画像Aのピクセル9の場合にだけ検査対象3の対応する領域の潅流の程度が求められ、それぞれのピクセル9に割付けられ、程度が、評価画像Aのそれぞれのピクセル9によって決定された投影画像Bの2次元の基本程度評価核19内にある投影画像Bのピクセル9のピクセル値の時間的経過に基づいて求められる。
(もっと読む)
三次元形状計測方法及び三次元形状計測装置
【課題】 三次元形状計測方法及び三次元形状計測装置において、簡略化した構成を提供することを目的とする。
【解決手段】 投光部101(点光源)から発せられた照明光は、第1照明光変換部102によって構造化され、第2照明光変換部103によって再構造化されたのち、被写体200に投影される。第1照明光変換部102と第2照明変換部103は平行に配置され、撮像部300は、投光部101から発せられ、構造化された照明光が被写体200に投影されている状態を撮像することができる。また、撮像部300と投光部101との位置関係は予め測定しておき、移動装置104は、第2照明光変換部103を第1照明光変換部102とを平行に保ち、第1照明光変換部102と第2照明光変換部104との距離を保持する方向に移動させることができ、撮影スイッチ301を押下すると撮影を開始する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 情報欠落画素を除外した元画像に対してそのまま所要の処理を行うことができ、画像処理の負担を軽減して動作速度の向上を図る。
【解決手段】 カラー撮像デバイスで作られた画像を取り込む取り込み工程(S1)と、前記取り込み工程で取り込まれた画像を所定方向に45度回転させて新たな座標系の回転画像を生成する第一の座標変換工程(S2)と、前記回転画像に対して画像処理を行う画像処理工程(S3)と、前記画像処理後の画像を前記所定方向の逆方向に45度回転させて元の座標系の画像に反映させる第二の座標変換工程(S4)とを含む。単板式のカラー撮像デバイスで作られた画像に含まれる情報欠落画素の補間処理を必要とせずに、所要の画像処理を実行できる。
(もっと読む)
画像のセットから合成画像を生成するための方法
【課題】イメージのセットからコンポジット・イメージを生成するための方法および装置を提供する。
【解決手段】イメージのセットから基準イメージが選択される。セット内の残りのイメージが、基準イメージに対して直接、もしくは先行して位置合わせ済みの中間イメージを介して位置合わせされる。先行して位置合わせ済みの中間イメージを介したイメージの位置合わせは、そのイメージから先行して位置合わせ済みの中間イメージを通って基準イメージに至る最短パスの長さを少なくとも部分的に基礎とする。基準イメージに対して残りのイメージのマッピングが行われ、それによってコンポジット・イメージが生成される。
(もっと読む)
改良型ホログラフィ撮像のためのシステムおよび方法
改良型ホログラフィ撮像システムのための方法およびシステムは、光源、1つまたは複数の撮像システム・コンポーネント、ビームスプリッタ、空間フィルタ、およびビーム結合器を備えてもよい。光源は、電磁エネルギーの第1ビームを生成するように動作してもよく、また、1つまたは複数の撮像システム・コンポーネントは、第1ビームの少なくとも一部分に、ターゲットと相互作用させるように動作してもよい。ビームスプリッタは、第1ビームがターゲットと相互作用した後に、ターゲットと相互作用する第1ビームの部分を、参照ビームとターゲット・ビームに分離するように動作してもよい。空間フィルタは、参照ビームから0次画像情報を抽出し、0次画像情報を0次ビームとして伝達するように動作してもよい。ビーム結合器は、0次ビームをターゲット・ビームと結合して、ホログラフィ画像を生成するように動作してもよい。  (もっと読む)
(もっと読む)
信号処理装置
【課題】信号を復元するに当たり、装置の大型化を防止すると共に、現実性のある回路処理方式を提案すること。
【解決手段】 この信号処理装置は、信号を処理する処理部を有する。この処理部は、信号変化の要因となる変化要因情報のデータGを利用して、任意の信号のデータIoから比較用データIo′を生成し、その後、処理対象となる原信号のデータImg′と比較用データIo′とを比較し、得られた差分のデータδを変化要因情報のデータGを利用して任意の信号のデータIoに配分することで復元データIo+nを生成し、その後、この復元データIo+nを任意の信号データIoの代わりに使用し、同様の処理を繰り返すことで変化前(劣化等する前)の原信号に近似する復元データIo+nを生成する処理を行う。
(もっと読む)
印刷物の品質検査装置、印刷物の品質検査方法及びその品質検査システム
【課題】 検査スピードの高速化を図り、大量の印刷物を短時間で仕上げられ、短期間での納入を希望する顧客の要求に応えられる印刷物の品質検査装置、印刷物の品質検査方法及びその品質検査システムを提供する。
【解決手段】 印刷物の印刷画像に対する良否判定を行う際に用いる基準値を記憶させるメモリを備え、良品印刷物から読み取った画像データと、被検査印刷物から読み取った画像データとに基づき、前記被検査印刷物の印刷画像の良否判定を行う方式の印刷物の品質検査装置において、前記良品印刷物から読み取った画像データからチェックサムを演算し、前記チェックサムを前記メモリに基準値として記憶させる基準値登録部と、被検査印刷物の画像から読み取った画像データのチェックサムを演算するチェックサム演算部と、前記チェックサム演算部で演算したチェックサムと、前記メモリに記憶されている基準値とを比較し良否判定を行う判定部とを備える。
(もっと読む)
画像処理装置及びその制御方法、プログラム
【課題】 オリジナル画像を用いて印刷された文書に、オリジナル画像にはない余白領域が文書領域の周りに生じているような場合でも、その文書のスキャン画像とオリジナル画像との高精度なレイアウト比較が可能となる画像処理装置及びその制御方法、プログラムを提供する。
【解決手段】 比較先画像となるオリジナル画像を入力する。オリジナル画像中のブロックに関するブロック情報を抽出する。オリジナル画像のサイズが所定サイズであるか否かを判定する。判定の結果、オリジナル画像のサイズが所定サイズではない場合、オリジナル画像を所定サイズの画像にマッピングした際のブロックに関するブロック情報を作成する。比較元画像を入力する。比較元画像中のブロックに関するブロック情報を抽出する。比較元画像のブロック情報と、比較先画像のブロック情報とを比較する。
(もっと読む)
画像処理装置及びプログラム
【課題】合成画像に対する撮像レンズの歪みの影響を抑える。
【解決手段】撮像装置100であって、映像信号処理部13は、撮像レンズを用いて撮像された複数の画像のうち、何れか一の画像の一の特徴点から当該特徴点に対応する他の画像の他の特徴点までの移動量を算出する処理を行い、また、算出された移動量に基づいて、他の特徴点が一の特徴点に対して移動していないと判定された場合に、複数の特徴点の全てを用いて座標変換式を算出させる処理を行う一方で、他の特徴点が一の特徴点に対して移動していると判定された場合に、その移動量が大きくなる程、複数の特徴点のうちの画像のより中心側に位置する特徴点のみを用いて座標変換式を算出させる処理を行う。
(もっと読む)
手持ち型画像処理装置
非接触の形で対象物を検査するための手持ち型検査装置を提供する。本装置は、検査する対象物から投射または反射された光線を集めるように構成されたテレセントリックレンズを有したテレセントリックレンズ構成部と、テレセントリックレンズに対して、テレセントリックレンズが集めた光線を受け取り、これらを変換して対象物を表す画像を作る、という形に構成されたCCDデジタルカメラなどのモバイル撮像デバイスと、を有し、対象物から遠ざかる方向または対象物に向かう方向に装置が移動することで、撮像デバイス上で画像は同じサイズを保つ、という形になるようにテレセントリックレンズが構成されている。効果的な構成として、着脱可能な形でカメラに設置され、目的に応じて交換可能な照明ユニットを備える。  (もっと読む)
(もっと読む)
画像処理装置
【課題】画像を復元するに当たり、装置の大型化を防止すると共に、現実性のある回路処理方式を提案すること。
【解決手段】この画像処理装置は、画像を処理する処理部を有する。この処理部は、画像変化の要因となる変化要因情報のデータGを利用して、任意の画像のデータIoから比較用データIo′を生成し、その後、処理対象となる原画像のデータImg′と比較用データIo′とを比較し、得られた差分のデータσを変化要因情報のデータGを利用して任意の画像のデータIoに配分することで復元データIo+nを生成し、その後、この復元データIo+nを任意の画像データIoの代わりに使用し、同様の処理を繰り返すことで変化前(劣化等する前)の原画像に近似する復元データIo+nを生成する処理を行う。
(もっと読む)
深度マップを作成するための演算方法、機械読み取り可能な媒体、演算装置及び演算システム
【課題】 3次元空間シーンの2つのピクチャから深度マップを生成すること。
【解決手段】 3次元空間シーンの2つのピクチャから深度マップを生成する画像取得システムが説明される。本発明の一態様によれば、システムは、2つのピクチャ間の相対的ぼけと、システムに由来する絶対的ぼけとに基づいて深度マップを生成する。本発明の別の態様によれば、システムは、2つのピクチャ間の相対的ぼけから直接、深度マップを演算する。
(もっと読む)
障害物検出システム及び障害物検出方法
【課題】 運転者が目視確認することができない領域で赤外光画像により歩行者、自転車等の障害物を検出された場合にのみ、運転者に対して何らかの警告情報を出力することができる障害物検出システム及び障害物検出方法を提供する。
【解決手段】 撮像装置は、可視光に基づいて画像を取得する可視光撮像装置及び赤外光に基づいて画像を取得する赤外光撮像装置で構成する。画像処理装置は、可視光撮像装置から取得した画像データ中に物体検出領域が存在するか否か判断し、存在すると判断した場合、赤外光撮像装置から取得した画像データ中に物体検出領域が存在するか否かを判断し、存在すると判断した場合、双方の物体検出領域が同一であるか否かを判断する。同一でないと判断した場合、物体検出領域が存在する旨を示す情報を出力装置へ送出し、物体検出領域が存在する旨を出力する。
(もっと読む)
撮像装置
【課題】顔検出技術を用いることで、ユーザにとって望ましい人物画像が撮影できる撮像装置を提供する。
【解決手段】被写体を捉えた撮影によって、その被写体の画像を表す画像信号を生成する撮像部と、上記被写体の画像中で人物の目部分を検出し、その検出した目部分に目瞑りが生じているか否かを判定する目瞑り判定部と、上記目瞑り判定部によって、目瞑りが生じていると判定された場合には所定の警告を発し、上記目瞑り判定部によって、目瞑りが生じていないと判定された場合には、上記撮像部によって生成された画像信号を所定の記録媒体に記録する画像記録部とを備えた。
(もっと読む)
診断画像処理方法、画像診断装置及び診断画像処理プログラム
【課題】 造影剤が通流される体腔部の病変の診断に好適な診断支援情報を提供する。
【解決手段】 造影剤が流通される被検体の食道を含む部位の画像を連続的に撮像した画像を取込み(S1)、撮像した画像上に食道を横切って設定された検査ラインと食道の輪郭が交差する輪郭点を検出し(S2,S3)、造影剤の通過後の空気層における輪郭点の位置の変化に基づいて診断支援情報を生成する(S4)。この診断支援情報には、輪郭点の位置変化の軌跡の画像、あるいは、輪郭点の位置変化率が閾値を越える場合に病変が有ると判定した情報等を含めることができる(S5、S6、S7)。これにより、空気層による食道の輪郭の変化を容易に認識でき、小さな病変やスキルスと称される薄く広がった病変を認識することができる。
(もっと読む)
2,201 - 2,220 / 2,719
[ Back to top ]